Das könnte Ihnen auch gefallen
- Spice Ii: Prepared by Dr. Wagih GirgisDokument30 SeitenSpice Ii: Prepared by Dr. Wagih GirgisMostafa MohamedNoch keine Bewertungen
- Unit 3Dokument66 SeitenUnit 3Venky VellankiNoch keine Bewertungen
- Speed Control of DC Motor Using PDokument22 SeitenSpeed Control of DC Motor Using PAnanth Sai YadavNoch keine Bewertungen
- PWM Inverters: An Introduction to Pulse Width Modulation TechniquesDokument4 SeitenPWM Inverters: An Introduction to Pulse Width Modulation TechniquesHassan FarssiNoch keine Bewertungen
- Chapter 4: Analog and PWM Output ControlDokument20 SeitenChapter 4: Analog and PWM Output ControlNecNoch keine Bewertungen
- Power Electronics Experiments ECE-P-672Dokument9 SeitenPower Electronics Experiments ECE-P-672Sai SomayajulaNoch keine Bewertungen
- Buck Converter Simulation Using ArduinoDokument4 SeitenBuck Converter Simulation Using Arduinoxces 2312Noch keine Bewertungen
- Power Electronics Slides and Notes DC ConvertersDokument40 SeitenPower Electronics Slides and Notes DC ConvertersAnoop MathewNoch keine Bewertungen
- POL Power Supply Design ComparisonDokument30 SeitenPOL Power Supply Design ComparisonGlenn KerselaersNoch keine Bewertungen
- You. You Are Not Allowed To Share Your Solutions With Others in The ClassDokument16 SeitenYou. You Are Not Allowed To Share Your Solutions With Others in The ClassJitendra SinghNoch keine Bewertungen
- Implementation of A High Voltage Power SupplyDokument4 SeitenImplementation of A High Voltage Power SupplyJiakeat LiauNoch keine Bewertungen
- PWM To DC Voltage Conversion: Kyle Burgess 4/3/2015Dokument8 SeitenPWM To DC Voltage Conversion: Kyle Burgess 4/3/2015NaranLoganNoch keine Bewertungen
- IC Questions With Ans AnilsirDokument22 SeitenIC Questions With Ans AnilsirAniil J Kumaar50% (2)
- Auto Zero Op AmpDokument3 SeitenAuto Zero Op AmpAndrei SevcencoNoch keine Bewertungen
- Experiment 3Dokument6 SeitenExperiment 3piyushvarsh0Noch keine Bewertungen
- An H50Dokument4 SeitenAn H50Hugo RojasNoch keine Bewertungen
- Q02201300137Dokument8 SeitenQ02201300137Vikas PatelNoch keine Bewertungen
- Lab ManualDokument56 SeitenLab ManualNarendra ReddyNoch keine Bewertungen
- Tutorial Sheet 5Dokument2 SeitenTutorial Sheet 5Shashank SinghNoch keine Bewertungen
- 7+Diode+Circuits RectifiersDokument31 Seiten7+Diode+Circuits RectifiersRyan Anthony AndalNoch keine Bewertungen
- Operational Amplifier LAbDokument17 SeitenOperational Amplifier LAbAhmad DboukNoch keine Bewertungen
- CMOS Comparator Design: TSMC 0.25 Um TechnologyDokument15 SeitenCMOS Comparator Design: TSMC 0.25 Um TechnologySharath_Patil_7623Noch keine Bewertungen
- Lab Design and Analysis of Active CS and Cascode AmplifierDokument3 SeitenLab Design and Analysis of Active CS and Cascode AmplifierAzure HereNoch keine Bewertungen
- Assignment 1 Digital IC DesignDokument2 SeitenAssignment 1 Digital IC DesignsidhjajNoch keine Bewertungen
- Uc 3872 DWDokument8 SeitenUc 3872 DWCarlos CuebasNoch keine Bewertungen
- Introduction To Practical Exercises Using MODICOM 2 ... - LJ Create PDFDokument8 SeitenIntroduction To Practical Exercises Using MODICOM 2 ... - LJ Create PDFAnonymous FKMfvCbNoch keine Bewertungen
- Mbed CH 4 v1Dokument15 SeitenMbed CH 4 v1Brian YehNoch keine Bewertungen
- PWM Signal GeneratorsDokument3 SeitenPWM Signal GeneratorsjalalhNoch keine Bewertungen
- Ivc102 DatasheetDokument15 SeitenIvc102 DatasheetChristian CândidoNoch keine Bewertungen
- High Bandwidth Low Noise Amplifier with improved stabilityDokument11 SeitenHigh Bandwidth Low Noise Amplifier with improved stabilitysushil4056Noch keine Bewertungen
- Psim SVMDokument9 SeitenPsim SVMNarendra ReddyNoch keine Bewertungen
- Lab 10Dokument8 SeitenLab 10A. AlghamdiNoch keine Bewertungen
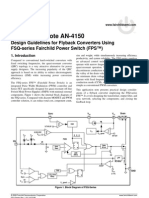
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Dokument16 SeitenApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNoch keine Bewertungen
- Design A 200 Watt, 150 V PWM Bipolar InverterDokument11 SeitenDesign A 200 Watt, 150 V PWM Bipolar InverterSubzero Bill100% (1)
- Pspice Simulation of Power Electronics Circuits: Part 3 of Extra Material For Use WithDokument26 SeitenPspice Simulation of Power Electronics Circuits: Part 3 of Extra Material For Use WithawemetalNoch keine Bewertungen
- Dual-Phase, Quick-PWM Controllers For IMVP-IV CPU Core Power SuppliesDokument45 SeitenDual-Phase, Quick-PWM Controllers For IMVP-IV CPU Core Power Supplieslucian1961Noch keine Bewertungen
- Digital PSS Control for Flyback ConvertersDokument6 SeitenDigital PSS Control for Flyback ConvertersSuselleNoch keine Bewertungen
- Revisit: Resistance and Capacitance MOSFET Model For Digital CircuitsDokument33 SeitenRevisit: Resistance and Capacitance MOSFET Model For Digital Circuitsdilshan singhNoch keine Bewertungen
- Max1987 1988Dokument45 SeitenMax1987 1988s_vallespinNoch keine Bewertungen
- CMOS Inverter Modelling On CADENCEDokument5 SeitenCMOS Inverter Modelling On CADENCESanket KoleyNoch keine Bewertungen
- PWM Signal Generators: Testing Status: Mixed. Some Untested, Some SPICE SimulatedDokument15 SeitenPWM Signal Generators: Testing Status: Mixed. Some Untested, Some SPICE SimulatedSivareddy MudiyalaNoch keine Bewertungen
- Design AM Transceiver and Measure RegulationDokument66 SeitenDesign AM Transceiver and Measure RegulationjebadanielNoch keine Bewertungen
- 10.boot Strap SweepDokument3 Seiten10.boot Strap SweepBharadwaj MedapuramNoch keine Bewertungen
- EC319 (CS) Unit 1 Part 2Dokument72 SeitenEC319 (CS) Unit 1 Part 2Rahul LoharNoch keine Bewertungen
- Lab 9Dokument13 SeitenLab 9A. AlghamdiNoch keine Bewertungen
- Space Vector PWM - 2Dokument6 SeitenSpace Vector PWM - 2guanitouNoch keine Bewertungen
- SPWMDokument5 SeitenSPWMKiran Kumar NallamekalaNoch keine Bewertungen
- 2 in One LabDokument5 Seiten2 in One LabEnock KachokolaNoch keine Bewertungen
- Experiment No 10 Apparatus: To Study and Design DifferntiatorDokument5 SeitenExperiment No 10 Apparatus: To Study and Design DifferntiatorMohsin TariqNoch keine Bewertungen
- Direct Digital Synthesis Controlled Pure Sine Wave InverterDokument17 SeitenDirect Digital Synthesis Controlled Pure Sine Wave InverterNabil MohammadNoch keine Bewertungen
- PWM DemodulatorsDokument8 SeitenPWM DemodulatorsPutri PratiwiNoch keine Bewertungen
- Function Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorDokument7 SeitenFunction Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorMuhammad JunaidNoch keine Bewertungen
- Pulse Width Mod/Demod LabDokument2 SeitenPulse Width Mod/Demod LabBillion money FxNoch keine Bewertungen
- Boost DesignDokument4 SeitenBoost DesignmuthukumartharaniNoch keine Bewertungen
- Amplifier A PrelabDokument7 SeitenAmplifier A Prelabatomking73Noch keine Bewertungen
- Solution InverterDokument12 SeitenSolution InverterPragati Rana50% (2)
- University of Engineering & Technology LahoreDokument43 SeitenUniversity of Engineering & Technology LahoreKantesh KumarNoch keine Bewertungen
- IADC DesignDokument10 SeitenIADC Designchintu333Noch keine Bewertungen
- Chapter 8Dokument34 SeitenChapter 8Abhinav GuptaNoch keine Bewertungen
- FWF MMTC e LetterDokument3 SeitenFWF MMTC e LetterMalu MohanNoch keine Bewertungen
- CH8-E3-E4 EWS-Landline & Mobile VASDokument37 SeitenCH8-E3-E4 EWS-Landline & Mobile VASMalu MohanNoch keine Bewertungen
- 1 IntroductionDokument29 Seiten1 IntroductionMalu MohanNoch keine Bewertungen
- Fundamentals of Power Systems PDFDokument13 SeitenFundamentals of Power Systems PDFSurender ReddyNoch keine Bewertungen
- Nguyen Than Fiberoptic2Dokument18 SeitenNguyen Than Fiberoptic2Malu MohanNoch keine Bewertungen
- PQ 99Dokument13 SeitenPQ 99Malu MohanNoch keine Bewertungen
- CH 4Dokument22 SeitenCH 4Malu MohanNoch keine Bewertungen
- Ch1 E3 E4 Ews NGSDH ConceptsDokument25 SeitenCh1 E3 E4 Ews NGSDH ConceptsMalu MohanNoch keine Bewertungen
- Ch1 E3 E4 Ews NGSDH ConceptsDokument25 SeitenCh1 E3 E4 Ews NGSDH ConceptsMalu MohanNoch keine Bewertungen
- Synchronous Digital Hierarchy (SDH)Dokument53 SeitenSynchronous Digital Hierarchy (SDH)kunj bihari rajpootNoch keine Bewertungen
- EC2042 Embedded and Real Time Systems Lecture NotesDokument79 SeitenEC2042 Embedded and Real Time Systems Lecture NotesPraveen ChellapandianNoch keine Bewertungen
- Electrical Power System Fundamentals for Non-Electrical EngineersDokument42 SeitenElectrical Power System Fundamentals for Non-Electrical EngineersMoeed IqbalNoch keine Bewertungen
- Harmonic Wavelet AnalysisDokument23 SeitenHarmonic Wavelet AnalysisMalu MohanNoch keine Bewertungen
- Bi Directional InverterDokument7 SeitenBi Directional InverterMalu MohanNoch keine Bewertungen
- Frequency-Domain Control Systems Analysis and DesignDokument69 SeitenFrequency-Domain Control Systems Analysis and DesignMalu MohanNoch keine Bewertungen
- Classification of Power Quality Disturbances Using Dual Wavelet Transforms and SVMDokument6 SeitenClassification of Power Quality Disturbances Using Dual Wavelet Transforms and SVMMalu MohanNoch keine Bewertungen
- Finite State Machines: by Mike ChenDokument25 SeitenFinite State Machines: by Mike ChenKulwant NagiNoch keine Bewertungen
- Optimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingDokument21 SeitenOptimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingMalu MohanNoch keine Bewertungen
- Lect12 - Software QualityDokument15 SeitenLect12 - Software QualityMalu MohanNoch keine Bewertungen
- Finite State Machine (FSM) : ExampleDokument22 SeitenFinite State Machine (FSM) : ExampleDanish WilsonNoch keine Bewertungen
- Spread Spectrum: Wireless Networks Spring 2005Dokument30 SeitenSpread Spectrum: Wireless Networks Spring 2005Malu MohanNoch keine Bewertungen
- Power Quality LunchandLearnDokument41 SeitenPower Quality LunchandLearnMalu MohanNoch keine Bewertungen
- E Book Scheduling in Real Time SystemsDokument284 SeitenE Book Scheduling in Real Time SystemsMalu MohanNoch keine Bewertungen
- Heartbeat and Temperatire Monitoring SystemDokument20 SeitenHeartbeat and Temperatire Monitoring SystemMalu MohanNoch keine Bewertungen
- Tutorialv0 3Dokument92 SeitenTutorialv0 3Malu MohanNoch keine Bewertungen
- Mips DatapathDokument23 SeitenMips DatapathKaran KampaniNoch keine Bewertungen
- Heartbeat and Temperatire Monitoring SystemDokument20 SeitenHeartbeat and Temperatire Monitoring SystemMalu MohanNoch keine Bewertungen
- 03 Linked ListsDokument22 Seiten03 Linked ListsAnonymous V7P5fNQINoch keine Bewertungen
- Notice That The L293D Supports Two DC MotorsDokument10 SeitenNotice That The L293D Supports Two DC MotorsMalu MohanNoch keine Bewertungen
- Install Ns2 On Windows7Dokument1 SeiteInstall Ns2 On Windows7Malu MohanNoch keine Bewertungen
- Z-SH1N EATON MOELLER Fuse Disconnectors, 1pole+n, 10 X 38Dokument1 SeiteZ-SH1N EATON MOELLER Fuse Disconnectors, 1pole+n, 10 X 38co_stel817842Noch keine Bewertungen
- 3M™ Scotchcast™ Flexible Power Cable Splicing Kits 82-F and 82-BF SeriesDokument3 Seiten3M™ Scotchcast™ Flexible Power Cable Splicing Kits 82-F and 82-BF SeriesTiyok HariNoch keine Bewertungen
- Sony KV-29FS120 (Chassis BA-6) PDFDokument81 SeitenSony KV-29FS120 (Chassis BA-6) PDFJuan Diego Calsin TapiaNoch keine Bewertungen
- Christie RF80 K Specification SheetDokument6 SeitenChristie RF80 K Specification SheetJuan MartinezNoch keine Bewertungen
- Dynamic Vs Electret Vs Carbon HandsetDokument1 SeiteDynamic Vs Electret Vs Carbon HandsetPedro AlexandreNoch keine Bewertungen
- 3 - Electrical System PDFDokument39 Seiten3 - Electrical System PDFnamduong3680% (1)
- Thomas Young, (Born June 13, 1773, Milverton, Somerset, England-Died May 10Dokument11 SeitenThomas Young, (Born June 13, 1773, Milverton, Somerset, England-Died May 10OS WSNoch keine Bewertungen
- Fuse and Types of Fuses - Electrical Technology-OkDokument7 SeitenFuse and Types of Fuses - Electrical Technology-Okdrastir_777100% (1)
- Questions & Answers On Commutation Process & Excitation MethodsDokument23 SeitenQuestions & Answers On Commutation Process & Excitation Methodskibrom atsbhaNoch keine Bewertungen
- Class 7 - Chapter 14 - Electric Current and Its EffectsDokument4 SeitenClass 7 - Chapter 14 - Electric Current and Its EffectshamzaNoch keine Bewertungen
- Manual Usuario EspañolDokument144 SeitenManual Usuario EspañolNarda TiconaNoch keine Bewertungen
- Dr. Ahmed Said's Introduction to Electronics Chapter on Atoms, SemiconductorsDokument28 SeitenDr. Ahmed Said's Introduction to Electronics Chapter on Atoms, Semiconductorsmustafa osmanNoch keine Bewertungen
- Design of 220kV Transmission Line Tower Using STAAD.ProDokument27 SeitenDesign of 220kV Transmission Line Tower Using STAAD.ProIlham HusseinNoch keine Bewertungen
- ConductorsDokument19 SeitenConductorsNavdeep KaurNoch keine Bewertungen
- 10 Dollar Phone Patch PDFDokument2 Seiten10 Dollar Phone Patch PDFblesk2hotNoch keine Bewertungen
- сервис мануал LG 43UJ634V шасси UD74P PDFDokument101 Seitenсервис мануал LG 43UJ634V шасси UD74P PDFsebas ruiz100% (1)
- Maitinimo Saltiniai Sitop - kt10 1Dokument164 SeitenMaitinimo Saltiniai Sitop - kt10 1Jucimar BrilhanteNoch keine Bewertungen
- Elebtikartech - 2 MVA OfferDokument7 SeitenElebtikartech - 2 MVA Offerاحمد العبيديNoch keine Bewertungen
- Aqh 2213Dokument6 SeitenAqh 2213johnbad36Noch keine Bewertungen
- 10ka Class 2 Arresters Certified Test Report cp0408Dokument11 Seiten10ka Class 2 Arresters Certified Test Report cp0408Siddhartha MishraNoch keine Bewertungen
- Series and Parallel CircuitsDokument19 SeitenSeries and Parallel CircuitsBrandon WhymanNoch keine Bewertungen
- XL LX: TO THE To Eb IN A: XDokument13 SeitenXL LX: TO THE To Eb IN A: XCrystal Joy DizonNoch keine Bewertungen
- Bit3193g PDFDokument10 SeitenBit3193g PDFh.keulder1480Noch keine Bewertungen
- Signal Condititioning DevicesDokument17 SeitenSignal Condititioning DevicesAnish LotraNoch keine Bewertungen
- Wiring Phone JackDokument2 SeitenWiring Phone JackBrett WoodsNoch keine Bewertungen
- Circuit Elements and ParametersDokument30 SeitenCircuit Elements and ParametersCarl PNoch keine Bewertungen
- Automatic Water Level Indicator With AlarmDokument31 SeitenAutomatic Water Level Indicator With Alarmchuck254Noch keine Bewertungen
- HV MemoDokument17 SeitenHV MemohadrienNoch keine Bewertungen
- IMI TRM 420ma LowresDokument20 SeitenIMI TRM 420ma LowresALEXSANDRONoch keine Bewertungen
- Lecture 11 - Opaerational Amplifiers-3Dokument48 SeitenLecture 11 - Opaerational Amplifiers-3Kamran AbdullahNoch keine Bewertungen