Das könnte Ihnen auch gefallen
- 65192en PDFDokument167 Seiten65192en PDFahmad maleki100% (1)
- MSC AdamsDokument16 SeitenMSC Adamskuldeepsingh055100% (1)
- Using RecurdynDokument7 SeitenUsing RecurdynAlireza safazadehNoch keine Bewertungen
- ANSYS Mechanical ProductsDokument12 SeitenANSYS Mechanical Productsj_c_garcia_dNoch keine Bewertungen
- The Multibody Systems Approach to Vehicle DynamicsVon EverandThe Multibody Systems Approach to Vehicle DynamicsBewertung: 5 von 5 Sternen5/5 (2)
- Ashare 62 2001Dokument40 SeitenAshare 62 2001Trương Văn Cường100% (2)
- KUKA KR C4 Assembly and Operating Instructions GuideDokument33 SeitenKUKA KR C4 Assembly and Operating Instructions GuideArturo PuenteNoch keine Bewertungen
- MBD PDFDokument53 SeitenMBD PDFMina ZakariaNoch keine Bewertungen
- Multi Link Suspension OptimizationDokument11 SeitenMulti Link Suspension OptimizationAlex Bradley100% (1)
- Automatic Underground Car Parking SystemDokument71 SeitenAutomatic Underground Car Parking Systemadjisetia100% (1)
- Vran Value Proposition and Cost Modeling: White PaperDokument22 SeitenVran Value Proposition and Cost Modeling: White PaperprakashnpkNoch keine Bewertungen
- Alfa Laval Pump Handbook PDFDokument257 SeitenAlfa Laval Pump Handbook PDFkashifwarsiNoch keine Bewertungen
- Dokumen - Tips Toyota BT Lpe200 Electric Pallet Truck Service Repair Manual1Dokument23 SeitenDokumen - Tips Toyota BT Lpe200 Electric Pallet Truck Service Repair Manual1Kadir Türksoy67% (3)
- CHAPTER 2 Review of Related Literature ADokument9 SeitenCHAPTER 2 Review of Related Literature AChristian Rey HinayNoch keine Bewertungen
- Model-Driven Online Capacity Management for Component-Based Software SystemsVon EverandModel-Driven Online Capacity Management for Component-Based Software SystemsNoch keine Bewertungen
- Basic of Dynamic Simulation Auto Desk InventorDokument24 SeitenBasic of Dynamic Simulation Auto Desk Inventorranganathan0818Noch keine Bewertungen
- LMS Imagine - Lab AMESim - VSD Solutions LR-34765 Tcm1023-216977Dokument4 SeitenLMS Imagine - Lab AMESim - VSD Solutions LR-34765 Tcm1023-216977Dhurai RajNoch keine Bewertungen
- LMS VirtualDokument8 SeitenLMS VirtualamanyannaggarNoch keine Bewertungen
- MSC Software Product RangeDokument9 SeitenMSC Software Product Rangekarthikgap2Noch keine Bewertungen
- LMS Virtual - Lab Powertrain MotionDokument1 SeiteLMS Virtual - Lab Powertrain Motionkangjian_sgNoch keine Bewertungen
- APC Fauricia 2009Dokument5 SeitenAPC Fauricia 2009Charlie TejNoch keine Bewertungen
- WP Adams LTRDokument5 SeitenWP Adams LTRBobBiberNoch keine Bewertungen
- Model-Based Design For Off-Highway Machine SystemsDokument11 SeitenModel-Based Design For Off-Highway Machine SystemshathamphanNoch keine Bewertungen
- Brochure - LMS Virtual - Lab Noise and VibrationDokument12 SeitenBrochure - LMS Virtual - Lab Noise and Vibrationsantosh_ramuNoch keine Bewertungen
- BR Industry-Machinery LTR WDokument8 SeitenBR Industry-Machinery LTR Wbagwanjaved2010Noch keine Bewertungen
- (Brief Report) : Abaqus Fe-SafeDokument3 Seiten(Brief Report) : Abaqus Fe-SafeDigantNoch keine Bewertungen
- The Virtual Prototype of A Mechatronic SuspensionDokument11 SeitenThe Virtual Prototype of A Mechatronic SuspensionsherishaNoch keine Bewertungen
- Motions Simulation 2010 ENG FINALDokument16 SeitenMotions Simulation 2010 ENG FINALLorenzoNoch keine Bewertungen
- REPORT About Adams Programme: Student Name: Halah Mohammed MostafaDokument32 SeitenREPORT About Adams Programme: Student Name: Halah Mohammed MostafaHalahMohammedNoch keine Bewertungen
- Brochure LMS TestLabDokument8 SeitenBrochure LMS TestLabYves-rolandN'guessanNoch keine Bewertungen
- Broch Samcef MecanoDokument4 SeitenBroch Samcef MecanoduytruongcotinNoch keine Bewertungen
- Ansa Kinematics Tool PDFDokument3 SeitenAnsa Kinematics Tool PDFRavi KumarNoch keine Bewertungen
- Ansa Kinematics Tool Unit 8Dokument3 SeitenAnsa Kinematics Tool Unit 8Raghavendra BhatNoch keine Bewertungen
- Designing Reliable SystemsDokument2 SeitenDesigning Reliable SystemsJosé CunhaNoch keine Bewertungen
- About Ansys: Finite Element AnalysisDokument2 SeitenAbout Ansys: Finite Element Analysissuffiya abdulNoch keine Bewertungen
- Dynamic Simulation of Mechatronic Systems: 7 European LS-DYNA ConferenceDokument10 SeitenDynamic Simulation of Mechatronic Systems: 7 European LS-DYNA ConferencePanciu OdobestiNoch keine Bewertungen
- Automotive Chassis TestingDokument2 SeitenAutomotive Chassis TestingWilliam GrecoNoch keine Bewertungen
- Chapter 2-Modeling, Simulation and Prototyping of Systems in Mechatronics ContextDokument39 SeitenChapter 2-Modeling, Simulation and Prototyping of Systems in Mechatronics ContextRahul AshokNoch keine Bewertungen
- TranslateokDokument2 SeitenTranslateokAnonymous pW1kBrNoch keine Bewertungen
- Appendix SYMBOLS Software OverviewDokument54 SeitenAppendix SYMBOLS Software OverviewHemantNoch keine Bewertungen
- Broch Samcef Mecano PDFDokument4 SeitenBroch Samcef Mecano PDFTrường ĐàoNoch keine Bewertungen
- NX Motion SimulationDokument2 SeitenNX Motion SimulationRoman KerbelNoch keine Bewertungen
- An Introduction To Plug-and-Play Motion SubsystemsDokument5 SeitenAn Introduction To Plug-and-Play Motion SubsystemsIlija BozovicNoch keine Bewertungen
- Honda DurabilityDokument3 SeitenHonda DurabilityrcpawarNoch keine Bewertungen
- MSC NASTRAN AeroelasticityDokument2 SeitenMSC NASTRAN Aeroelasticitymat2230Noch keine Bewertungen
- Real Time Simulation of Complex Automatic Transmission ModelsDokument20 SeitenReal Time Simulation of Complex Automatic Transmission ModelsSudev NairNoch keine Bewertungen
- Data 01Dokument2 SeitenData 01aula8045040Noch keine Bewertungen
- Flaps Simulation: H. Guelzau, TUHH T. Krueger, AIRBUSDokument12 SeitenFlaps Simulation: H. Guelzau, TUHH T. Krueger, AIRBUSPrasad KaneNoch keine Bewertungen
- Whats Newb FGDFDokument20 SeitenWhats Newb FGDFHumayun NawazNoch keine Bewertungen
- Dynamic Test Bench For Motocross Engines: Terje Rølva G and Matteo BellaDokument19 SeitenDynamic Test Bench For Motocross Engines: Terje Rølva G and Matteo BellaSabrine Ben Hmida100% (1)
- STAR-CCM v7 BrochureDokument6 SeitenSTAR-CCM v7 BrochureAntonio MartinsNoch keine Bewertungen
- MSC FatigueDokument24 SeitenMSC FatigueintelligentloveNoch keine Bewertungen
- Topic 1Dokument10 SeitenTopic 1Swfian ۦۦNoch keine Bewertungen
- Simulation Buyers GuideDokument24 SeitenSimulation Buyers GuideMiguel Matias ReineroNoch keine Bewertungen
- Siemens PLM LMS Test Lab BrosurDokument16 SeitenSiemens PLM LMS Test Lab BrosurCindy WangNoch keine Bewertungen
- Computer Aided EngineeringDokument30 SeitenComputer Aided EngineeringPedro CamargoNoch keine Bewertungen
- E-Motor Design Using Multi-Physics Optimization: Application SheetDokument2 SeitenE-Motor Design Using Multi-Physics Optimization: Application SheetburchandadiNoch keine Bewertungen
- Computer Aided EngineeringDokument30 SeitenComputer Aided EngineeringSalam FaithNoch keine Bewertungen
- Mechatronics 2003Dokument6 SeitenMechatronics 2003SashankSashankNoch keine Bewertungen
- Landing GearDokument12 SeitenLanding GearcmpmarinhoNoch keine Bewertungen
- NX NastranDokument13 SeitenNX NastranedusaikiNoch keine Bewertungen
- Advanced Modeling To Simulate Real-World Behavior: DatasheetDokument2 SeitenAdvanced Modeling To Simulate Real-World Behavior: DatasheetAnonymous DehXfSd4xMNoch keine Bewertungen
- 6565 Ijmme Ijens PDFDokument17 Seiten6565 Ijmme Ijens PDFعلي كامل الاسديNoch keine Bewertungen
- Mechatronic Approach To The Machine Tool DesignDokument9 SeitenMechatronic Approach To The Machine Tool DesignMinh VuNoch keine Bewertungen
- Hwsolvers12.0.220 ReleaseNotesDokument40 SeitenHwsolvers12.0.220 ReleaseNotesporukiNoch keine Bewertungen
- M.Anas Assigment #2 SimulationDokument10 SeitenM.Anas Assigment #2 SimulationMubasher RajputNoch keine Bewertungen
- Clearspan™ Solarguard™ Round Style Storage BuildingDokument23 SeitenClearspan™ Solarguard™ Round Style Storage BuildingAldo A. MamaniNoch keine Bewertungen
- Manual - MaquinaDokument3 SeitenManual - MaquinaAldo A. MamaniNoch keine Bewertungen
- Diesel FuelsDokument1 SeiteDiesel FuelsAldo A. MamaniNoch keine Bewertungen
- Osciloscopio DigitalDokument82 SeitenOsciloscopio DigitaljesedriogamNoch keine Bewertungen
- Mae5230 CFD Intro Notes PDFDokument17 SeitenMae5230 CFD Intro Notes PDFDebabrata PaulNoch keine Bewertungen
- FLOW-3D Cast 3.2 ManualDokument49 SeitenFLOW-3D Cast 3.2 ManualAldo A. MamaniNoch keine Bewertungen
- FLOW-3D Cast 3.2 ManualDokument49 SeitenFLOW-3D Cast 3.2 ManualAldo A. MamaniNoch keine Bewertungen
- FLOW-3D Cast 3.2 ManualDokument49 SeitenFLOW-3D Cast 3.2 ManualAldo A. MamaniNoch keine Bewertungen
- Hartley 2010 Journal of Engineering ManufactureDokument15 SeitenHartley 2010 Journal of Engineering ManufactureAldo A. MamaniNoch keine Bewertungen
- Tanmay ResumeDokument4 SeitenTanmay ResumemuraliNoch keine Bewertungen
- SCM Final Report On LogisticsDokument20 SeitenSCM Final Report On LogisticsZariq ShahNoch keine Bewertungen
- SANS Number Edition Title XDokument1 SeiteSANS Number Edition Title XAbiodun IloriNoch keine Bewertungen
- Home Automation - Bticino My Home Digital SolutionsDokument68 SeitenHome Automation - Bticino My Home Digital SolutionsPopescu ConstantinNoch keine Bewertungen
- Om Term PaperDokument18 SeitenOm Term Papervicky273Noch keine Bewertungen
- Use of Big Data and Ai in The Banking: Submitted By: Abhishek KhuranaDokument12 SeitenUse of Big Data and Ai in The Banking: Submitted By: Abhishek KhuranaABHISHEK KHURANANoch keine Bewertungen
- Technical Guide 50HzDokument36 SeitenTechnical Guide 50HzYosephanderNoch keine Bewertungen
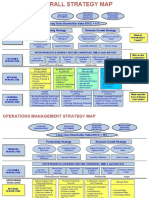
- Long-Term Shareholder Value ROCE 15% Productivity Strategy Revenue Growth StrategyDokument7 SeitenLong-Term Shareholder Value ROCE 15% Productivity Strategy Revenue Growth StrategyKamarulzaman Darus100% (2)
- 1 Fis Users Guide v2.3Dokument113 Seiten1 Fis Users Guide v2.3Fabian Enrique Limones100% (1)
- Manual Instalare Nice Toona 4024Dokument68 SeitenManual Instalare Nice Toona 4024Cristian GrosaruNoch keine Bewertungen
- Modern Apps Need Modern OpsDokument11 SeitenModern Apps Need Modern OpsHadi Ul HassanNoch keine Bewertungen
- Floor Cleaning Robot Project ReportDokument53 SeitenFloor Cleaning Robot Project Reportprabhu rachutiNoch keine Bewertungen
- Fire Protection Inspection Request Form 11-19-15Dokument1 SeiteFire Protection Inspection Request Form 11-19-15Waheeb SaidNoch keine Bewertungen
- Updated Profile Ellietrac Pitch DeckDokument11 SeitenUpdated Profile Ellietrac Pitch DeckAminul IslamNoch keine Bewertungen
- Sanyo HVAC CatalogDokument28 SeitenSanyo HVAC Cataloge-ComfortUSANoch keine Bewertungen
- UPATH ArchitectureDokument5 SeitenUPATH ArchitectureAparnaNoch keine Bewertungen
- Chapter 00Dokument8 SeitenChapter 00Shyamala Devi IitNoch keine Bewertungen
- 140-IM-3001-B SPA80 AHTS Training Manual PDFDokument142 Seiten140-IM-3001-B SPA80 AHTS Training Manual PDFruslan rumyantsevNoch keine Bewertungen
- SCHMIDT-Presses enDokument80 SeitenSCHMIDT-Presses enlucianNoch keine Bewertungen
- Sales Report CEFTDokument3 SeitenSales Report CEFTHemant Singh RajpootNoch keine Bewertungen
- Asphalt PaverDokument16 SeitenAsphalt Paverzae nurdinNoch keine Bewertungen
- Brosura IoT SC 2019Dokument60 SeitenBrosura IoT SC 2019Cristian CorneliuNoch keine Bewertungen
- Company Profile 2014 CompleteDokument41 SeitenCompany Profile 2014 Completerachman hardianNoch keine Bewertungen
- Catalog Accesorii Productie Wilson Tool Xtra 2017Dokument44 SeitenCatalog Accesorii Productie Wilson Tool Xtra 2017SM TECH SRLNoch keine Bewertungen