Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Equipos John DeereDokument1 SeiteEquipos John DeereGustavo GonzalezNoch keine Bewertungen
- Introduction Portable ToiletsDokument1 SeiteIntroduction Portable ToiletsShrestha Hem100% (1)
- Machine Design - LDokument2 SeitenMachine Design - LNilesh Mistry (Nilesh Sharma)Noch keine Bewertungen
- WMS For Pipe Supports ErectionDokument17 SeitenWMS For Pipe Supports ErectionRamaraju RNoch keine Bewertungen
- 07 - Boom Module 550 801 00 - TamrockDokument98 Seiten07 - Boom Module 550 801 00 - Tamrockcarlos mouraNoch keine Bewertungen
- Standard dimensions and data for steel and stainless steel pipe sizesDokument7 SeitenStandard dimensions and data for steel and stainless steel pipe sizesRSGatesNoch keine Bewertungen
- Copper Bonded Steel Earth RodDokument9 SeitenCopper Bonded Steel Earth Rodemmanuel_nyirendaNoch keine Bewertungen
- NVC - Tutorial Sheet No.1 Without SolutionDokument23 SeitenNVC - Tutorial Sheet No.1 Without SolutionPrabhpreet singhNoch keine Bewertungen
- High Temperature Tensile Strength TestingDokument4 SeitenHigh Temperature Tensile Strength TestingWalter RuedaNoch keine Bewertungen
- Hand & Mechanical Directional Valves: ISO 4401 Sizes 06, 10, 16 and 25Dokument6 SeitenHand & Mechanical Directional Valves: ISO 4401 Sizes 06, 10, 16 and 25aaaNoch keine Bewertungen
- Ruukki Load Bearing Profiled Sheet Installation InstructionsDokument20 SeitenRuukki Load Bearing Profiled Sheet Installation InstructionsEmanuel PopaNoch keine Bewertungen
- MasterFlow - 400 v1 - 2Dokument2 SeitenMasterFlow - 400 v1 - 2Vivek GaurNoch keine Bewertungen
- Electrical Estimation and Costing 15ee553 NotesDokument113 SeitenElectrical Estimation and Costing 15ee553 Notessriram70% (20)
- Detail Ground TankDokument1 SeiteDetail Ground TankRully SaputraNoch keine Bewertungen
- New Power Supply Installation for 8 Aircon UnitsDokument2 SeitenNew Power Supply Installation for 8 Aircon UnitsJohn Ralph VegaNoch keine Bewertungen
- Design of FootingDokument18 SeitenDesign of Footingrumylo f. agustin100% (1)
- PENOLIOplumbing Design AnalysisDokument2 SeitenPENOLIOplumbing Design Analysisrrpenolio86% (7)
- Akpark: Cover Sheet - ElectricalDokument10 SeitenAkpark: Cover Sheet - ElectricalEngr M.Arshad KhalidNoch keine Bewertungen
- MT 25 BFB1Dokument74 SeitenMT 25 BFB1Meritz DanNoch keine Bewertungen
- Fort Jadhavgadh Urban Design Case StudyDokument8 SeitenFort Jadhavgadh Urban Design Case StudyAishwarya KambleNoch keine Bewertungen
- CONSEAL 300 Pure Bitumen WaterproofingDokument2 SeitenCONSEAL 300 Pure Bitumen WaterproofingGodwin IwekaNoch keine Bewertungen
- High Performance Louvers For Curtain Wall SystemsDokument8 SeitenHigh Performance Louvers For Curtain Wall Systemszeynepuzunoglu6Noch keine Bewertungen
- EML e BrochureDokument21 SeitenEML e BrochureECCSNoch keine Bewertungen
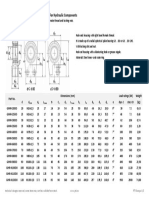
- GIHR-K..DO - Rod Ends For Hydraulic ComponentsDokument1 SeiteGIHR-K..DO - Rod Ends For Hydraulic ComponentsQuintrae DelfinNoch keine Bewertungen
- Ch17 ArchesDokument45 SeitenCh17 ArchesErnie ErnieNoch keine Bewertungen
- 4 Regular Design Services of The ArchitectDokument2 Seiten4 Regular Design Services of The ArchitectHaruno AknecsNoch keine Bewertungen
- Rev 1.1Dokument123 SeitenRev 1.1Muhammad Irfan ButtNoch keine Bewertungen
- Innvo8 Squash Court Panel System: Specification InformationDokument5 SeitenInnvo8 Squash Court Panel System: Specification InformationDaniil TriznoNoch keine Bewertungen
- Maintenance of Railway TrackDokument39 SeitenMaintenance of Railway TrackvennillaNoch keine Bewertungen
- Earthing Structures SystemsDokument72 SeitenEarthing Structures SystemsIsaac AppiagyeiNoch keine Bewertungen