Das könnte Ihnen auch gefallen
- Brochure For Workshop On SolarDokument2 SeitenBrochure For Workshop On SolarcoolunderjerkNoch keine Bewertungen
- 2012 13 Teaching Scheme MechanicalDokument1 Seite2012 13 Teaching Scheme MechanicalcoolunderjerkNoch keine Bewertungen
- Remuneration BillDokument1 SeiteRemuneration BillcoolunderjerkNoch keine Bewertungen
- Mechanical B.tech Structure 21-04-08Dokument10 SeitenMechanical B.tech Structure 21-04-081996siddhuNoch keine Bewertungen
- Abd BRD Abd Volvo TimingsDokument1 SeiteAbd BRD Abd Volvo TimingscoolunderjerkNoch keine Bewertungen
- Guidelines For BE Diploma ME MBA MCADokument1 SeiteGuidelines For BE Diploma ME MBA MCAnisarg_Noch keine Bewertungen
- UndertakingDokument1 SeiteUndertakingcoolunderjerkNoch keine Bewertungen
- APPENDIX 1 Revised Updated 21.5.14Dokument183 SeitenAPPENDIX 1 Revised Updated 21.5.14coolunderjerkNoch keine Bewertungen
- BTech syllabus and course detailsDokument16 SeitenBTech syllabus and course detailscoolunderjerkNoch keine Bewertungen
- Paper Format Be Sem 3 To 8 Me Mca Mba DHMCTDokument1 SeitePaper Format Be Sem 3 To 8 Me Mca Mba DHMCTcoolunderjerkNoch keine Bewertungen
- Polo E BrochureDokument14 SeitenPolo E BrochureSaniya SkNoch keine Bewertungen
- Real Meaning of Impact Factor of JournalDokument2 SeitenReal Meaning of Impact Factor of JournalcoolunderjerkNoch keine Bewertungen
- Copyright Transfer Form - Publish PaperDokument1 SeiteCopyright Transfer Form - Publish PapercoolunderjerkNoch keine Bewertungen
- Expression of Interest ApplicationDokument1 SeiteExpression of Interest ApplicationcoolunderjerkNoch keine Bewertungen
- Month Sun Mon Tue Wed Thu Fri Sat Month Sun Mon Tue Wed Thu Fri SatDokument1 SeiteMonth Sun Mon Tue Wed Thu Fri Sat Month Sun Mon Tue Wed Thu Fri SatcoolunderjerkNoch keine Bewertungen
- 10 1 1 101Dokument42 Seiten10 1 1 101me50Noch keine Bewertungen
- Arena User's GuideDokument150 SeitenArena User's GuideAlicia CrawfordNoch keine Bewertungen
- Www.tpapers.blogspot.com (79)Dokument12 SeitenWww.tpapers.blogspot.com (79)coolunderjerkNoch keine Bewertungen
- Simulacion Arena PDFDokument64 SeitenSimulacion Arena PDFneoelfeoNoch keine Bewertungen
- Creo 1Dokument46 SeitenCreo 1sandipusNoch keine Bewertungen
- CFX 11Dokument4 SeitenCFX 11coolunderjerkNoch keine Bewertungen
- For Getting Any One Course Material FreeDokument1 SeiteFor Getting Any One Course Material FreecoolunderjerkNoch keine Bewertungen
- ReceipeDokument2 SeitenReceipecoolunderjerkNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- CH20005-Chemical Reaction Engineering:) C C CRDokument2 SeitenCH20005-Chemical Reaction Engineering:) C C CRSunny KashyapNoch keine Bewertungen
- Information Folder LUCCON PDFDokument9 SeitenInformation Folder LUCCON PDFASHOKKUMAR ENoch keine Bewertungen
- Instructivo Luxometro Steren Her-410 PDFDokument12 SeitenInstructivo Luxometro Steren Her-410 PDFLuis CárdenasNoch keine Bewertungen
- PEGN 419 / GPGN 419 Spring 2017: Manika Prasad Mansur Ermila Expert Resource: Robert LieberDokument30 SeitenPEGN 419 / GPGN 419 Spring 2017: Manika Prasad Mansur Ermila Expert Resource: Robert LiebertahermohNoch keine Bewertungen
- Composite Beams & Columns To Eurocode 4Dokument155 SeitenComposite Beams & Columns To Eurocode 4dfdfdfasd324sad100% (2)
- Motion Programming For ComauDokument318 SeitenMotion Programming For ComauEddie Scarpa100% (1)
- Performance-Based Plastic Design and Energy-Based Evaluation of Seismic Resistant RC Moment FrameDokument7 SeitenPerformance-Based Plastic Design and Energy-Based Evaluation of Seismic Resistant RC Moment FrameARJafariNoch keine Bewertungen
- RCE2018 math and geometry problems solutions under 40 charactersDokument1 SeiteRCE2018 math and geometry problems solutions under 40 charactersArwin VillegasNoch keine Bewertungen
- The Planets Comparative Superlative - 87358Dokument2 SeitenThe Planets Comparative Superlative - 87358Maria AdamNoch keine Bewertungen
- SPE 122225 Gas Condensate Productivity Improvement by Chemical Wettability AlterationDokument12 SeitenSPE 122225 Gas Condensate Productivity Improvement by Chemical Wettability AlterationGabriel EduardoNoch keine Bewertungen
- GannZilla User GuideDokument20 SeitenGannZilla User GuideNiladri Jana100% (26)
- 4363 111 Machine Design IDokument6 Seiten4363 111 Machine Design Iyogesh_b_k100% (2)
- 53 TOP Structural Analysis - Civil Engineering Multiple Choice Questions AnDokument7 Seiten53 TOP Structural Analysis - Civil Engineering Multiple Choice Questions AnJohn Aries Almelor Sarza100% (1)
- BelowsDokument35 SeitenBelowstejassidhpuraNoch keine Bewertungen
- MasteringPhysics Pearson-Intro To Mastering and Math ReviewDokument57 SeitenMasteringPhysics Pearson-Intro To Mastering and Math ReviewShristi Singh80% (10)
- Data Sheet Monocristalino Chint Astronergy PDFDokument2 SeitenData Sheet Monocristalino Chint Astronergy PDFPaulo SousaNoch keine Bewertungen
- Love My LifeDokument5 SeitenLove My LifeLinda Veronica0% (1)
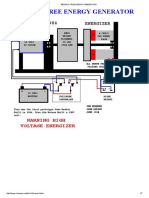
- Bedini's Free Energy Generator PDFDokument7 SeitenBedini's Free Energy Generator PDFRafly Attila Al-Fiqri71% (7)
- Literature SurveyDokument6 SeitenLiterature SurveyAnonymous j0aO95fgNoch keine Bewertungen
- Materials Finer Than 75 - M (No. 200) Sieve in Mineral Aggregates by WashingDokument3 SeitenMaterials Finer Than 75 - M (No. 200) Sieve in Mineral Aggregates by WashingLucio Rodriguez SifuentesNoch keine Bewertungen
- Teacher Guide Activity 2 AccelerationDokument4 SeitenTeacher Guide Activity 2 AccelerationCanada Railway TimesNoch keine Bewertungen
- Slope ND DeflectionDokument19 SeitenSlope ND DeflectionprashantbaraskarNoch keine Bewertungen
- NextFEM Designer Users Manual v1.10 p3Dokument96 SeitenNextFEM Designer Users Manual v1.10 p3Anonymous kBodCGQ79Noch keine Bewertungen
- PNA Chemistry Expedite 8900 User's GuideDokument114 SeitenPNA Chemistry Expedite 8900 User's GuideJohnNoch keine Bewertungen
- The Basics of General, Organic and Biological Chemistry - AttributedDokument1.421 SeitenThe Basics of General, Organic and Biological Chemistry - AttributedAlfonso J Sintjago100% (2)
- Theory of Chemical Kinetics and Charge Transfer Based On Nonequilibrium ThermodynamicsDokument17 SeitenTheory of Chemical Kinetics and Charge Transfer Based On Nonequilibrium ThermodynamicsYoana Yoa YoaNoch keine Bewertungen
- 4439testing MultipleDokument4 Seiten4439testing MultipleSonny RamosNoch keine Bewertungen
- Cati Pakistan Training Course - MechanicalDokument13 SeitenCati Pakistan Training Course - MechanicalImam Haryadi WibowoNoch keine Bewertungen
- How To Build With CobDokument33 SeitenHow To Build With CobmandritsopoulosNoch keine Bewertungen
- Elders Ray SYstemsDokument7 SeitenElders Ray SYstemssagarmkale4395Noch keine Bewertungen