Beruflich Dokumente
Kultur Dokumente
1-The Theory of SDH
Hochgeladen von
Zaenudin Cipta HassdyOriginalbeschreibung:
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
1-The Theory of SDH
Hochgeladen von
Zaenudin Cipta HassdyCopyright:
Verfügbare Formate
OpxX 2500+ ESTM
The Theory of SDH
Objectives: To master the concept of SDH. To master the characteristic of the SDH, the rate levels, the topologies of the SDH network, the basic NE type. To understand the frame structure and the procedures of multiplexing of SDH signals. To understand the function and working principle of the section overhead bytes, the path overhead bytes, the pointer bytes.
Issue 2.0 January 2001 1-1
The Theory of SDH
OptiX 2500+ ESTM
1.1 Overview
1.1.1 What is SDH?
SDH is the abbreviation of Synchronous Digital Hierarchy. Like PDH ---plesiochronous digital hierarchy, SDH is a transmission system (protocol) which defines the characteristic of digital signals, including frame structure, multiplexing method, digital rates hierarchy, and interface code pattern, and so on. SDH transmission network is an entirely brand new transmission network, with DXC, ADM, TM, REG constituting its nodes and high capacity optical fiber constituting its transmission link. It also boasts of flexible networking and network self-healing function. SDH is a general technique system both for optical fiber transmission and for microwave and satellite transmission.
1.1.2 The Characteristic of SDH over PDH
SDH uses universal interfaces to achieve the compatibility with different equipment from different vendors. It also boasts of highly efficient and coordinated management and operation through the whole network and transmission process, flexible networking and traffic dispatching, and network self-healing function. It greatly enhances the utilization ratio of network resources and reduces the OAM costs due to the enhanced maintenance function. 1. Interface Standardization of interfaces is the key to determine the possibility of realizing the interconnection among different equipment from different vendors. SDH system provides universal standards for Network Node Interfaces (NNI). 1) Electrical interface The electrical interface of the SDH equipment can be interconnected with the electrical interface of the PDH equipment, the exchange equipment trunk interface, the mobile equipment's trunk interface, the Code/Decode equipment's trunk interface if these equipment's trunk interface is standard. 2) Optical interface The optical interface of SDH adopts universal standards, so the SDH equipment from different vendors can be interconnected through the optical interface, while the PDH is not able to do this, as shown in Figure 1-1.
1-2 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
OptiX equipment
OptiX equipment
Other SDH equipment
Other SDH equipment
C
Transmission network 1 Transmission network 2
Figure 1-1 Different SDH equipment interconnected through the optical interfaces
As shown in figure 1-1, the OptiX transmission equipment of Huawei Technologies Co., Ltd make up of network 1, while the other SDH equipment from other vendor make up of network 2. Now there need 16 2Mbit/s circuits between station A and B. If these two transmission networks are not made up by SDH equipment but PDH equipment from different vendors, first we must drop 16 2M signals from network 1 and 2 to DDF at the connection point "C", then add them to PDH equipment in network 2 from DDF. It is very complex and need a lot of multiplexing/de-multiplexing equipment. Even if 34Mbit/s electrical interface connection is employed (multiplexing 16 2Mbit/s), while the equipment of two vendors are far away from each other, the direct connection of electrical interface is hardly achieved. If SDH equipment is used, there only needs a pair of optical fibers to achieve interconnection between these two transmission networks. Its advantages are self-evident. 2. Multiplexing method As low-rate PDH signals (e.g., the most common 2Mbit/s signal), with fixed positions, are multiplexed into the frame structure of high-rate SDH signals (e.g., 622Mbit/s signal of STM-4) via byte interleaved multiplexing method, their locations of low-rate PDH signals in the frame of high-rate SDH signal are fixed and regular. Therefore, low-rate PDH signals, e.g. 155Mbit/s, (STM-1 ), can be directly added to or dropped from high-rate signals, e.g., 2.5Gbit/s (STM-16 ). This simplifies the multiplexing and de-multiplexing processes of signals, and makes SDH hierarchy especially suitable for high rate and large capacity optical fiber transmission systems, as shown in Figure 1-2.
Issue 2.0 January 2001 1-3
The Theory of SDH
OptiX 2500+ ESTM
De-multiplexing
622Mbit/s
622Mbit/s
Multiplexing
2Mbit/s
Figure 1-2 the directly adding/dropping procedure
In PDH, only the signals of 1.544Mbit/s and 2.048Mbit/s are synchronous, while the signals of other rates are asynchronous. Since PDH adopts asynchronous multiplexing method, low-rate signals can not be directly added/dropped from PDH high-rate signals. For example, 2.048Mbit/s signals can not be directly added/dropped from 140Mbit/s signals. Here arises two problems: 1) Adding/dropping low-rate signals from high-rate signals must be conducted level by level. For example, to add/drop 2.048Mbit/s low-rate signals from 140Mbit/s signals, the following procedures must be conducted, as shown in (Figure 1-3):
140Mbit/s 34Mbit/s 8Mbit/s
de-multiplexer de-multiplexer de-multiplexer multiplexer multiplexer
140Mbit/s 34Mbit/s 8Mbit/s
multipilexer
2Mbit/s
Figure 1-3 Add/drop 2Mb/s signals from 140Mbit/s signals
2) Since adding/dropping low-rate signals to high-rate ones must go through many stages of multiplexing and de-multiplexing, the impairment ton the signals during multiplexing/de-multiplexing processes will be aggravated and transmission performance will deteriorate. This is unbearable in large capacity transmission. That's the reason why the transmission rate of PDH system has not been improved further. 3. Characteristics of operation, administration and maintenance Abundant overhead bits for operation, administration and maintenance (OAM) function are arranged in the frame structures of SDH signals. This greatly
1-4 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM strengthens the automation of network monitoring function and maintenance., i.e. automatic maintenance. Some redundancy bits must be added during line coding for line performance monitoring because few overhead bytes are arranged in PDH signals. The abundant overheads in SDH signals account for 1/20 of the total bytes in a frame. It greatly enhances the OAM function and reduces the cost of system maintenance which occupies most large proportion of the overall cost of telecommunication equipment. The overall cost of SDH system is less than that of PDH system, and estimated to be only 65.8% of that of the latter. 4. Compatibility SDH has high compatibility, which means that PDH service can be transmitted via the SDH transmission network while SDH transmission network is established. The two networks shall co-exist. And the existing PDH transmission network can work together while establishing SDH transmission network. Besides, SDH network can be used for transmitting signals of other hierarchies, such as asynchronous transfer mode (ATM) signals and FDDI signals. The basic transfer module (STM-1) of SDH signals in SDH network can accommodate three PDH digital signal hierarchies and other hierarchies such as ATM, FDDI and DQDB. This reflects the forward and backward compatibility of SDH and guarantees smooth transitions from PDH to SDH network and from SDH to ATM. How does SDH accommodate signals of these hierarchies? It simply multiplexes the low-rate signals of different hierarchies into the frame structure of the STM-1 signals at the boundary of the network (e.g. SDH/PDH start point) and then de-multiplexes them at the boundary of the network (end point). In this way, digital signals of different hierarchies can be transmitted in the SDH transmission network.
1.1.3 SDH Rate Level
SDH system provides a set of standard information structure levels, i.e. a set of standard rate levels. The basic module signal in SDH system is a synchronous transfer module ---- STM-1 at a rate of 155Mbit/s. STM-N signals of higher levels are formed by basic module signal--STM-1 via byte interleaved multiplexing. Among it, in particular, N is a positive whole number, N =1, 4, 16, 64. SDH signals of even higher levels include: STM-4 (622M bit/s), STM-16 (2.5G bit/s) and STM-64 (10G bit/s).
1.1.4 Forms of Basic SDH Network Elements
An optical synchronous digital transmission network consists of two parts: SDH network element (NE) equipment and optical cable system. NE equipment provides functions of synchronous transmission, multiplexing and cross connection of messages. According to the functions provided, NE equipment is classified into regenerators (REG), terminal multiplexer (TM),
Issue 2.0 January 2001 1-5
The Theory of SDH
OptiX 2500+ ESTM add and drop multiplexer (ADM) and digital cross connection equipment (DXC). 1. Terminal Multiplexers (TM) The following will describe the functions and features of terminal multiplexers (TMs) by taking STM-1 signal hierarchy as an example. Figure 1-4 illustrates the functions of a terminal multiplexer.
Power
Order Wire
Alarm
TMN Interface
155Mbit/s
155Mbit/s STM-1 TM
1.5
34
45
140
155
Figure 1-4 Functions of an STM-1 terminal multiplexer
As shown in the above figure, the main task of terminal multiplexer is responsible for incorporating PDH tributary signals with low rates (e.g. two types of low rate PDH signals: 2Mbit/s, 34Mbit/s, 140Mbit/s and 1.5Mbit/s, 6Mbit/s, 45Mbit/s) and SDH electrical signals at a rate of 155Mbit/s into STM-1 frame structure, and converting these electrical signals into STM-1 optical ones. Meanwhile, the terminal multiplexer implements the inverse process of the above procedures. Theoretically, the terminal multiplexers of higher hierarchy are the same as STM-1 ones except that the former can incorporate tributary signals with higher rates and greater capacity. Terminal multiplexers are principally used at the ends of point-to-point NE equipment or a chain network, as shown in Figure 1-5 and 1-6. Of course, terminal muptiplexers are often used in star, tree and train networks, as terminals of SDH transmission network.
TM
TM
Figure 1-5 Point-to-point application
1-6 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
TM
ADM
TM
Figure 1-6 A simple chain application
Additionally in practice, TMs can also be used in a ring-chain network as shown in Figure 1-7.
ADM
ADM
ADM
TM
ADM
Figure 1-7 Application in a ring-chain network
2. Add and Drop Multiplexers (ADM) ADMs are most popular NEs in networks because they incorporate the functions of synchronous multiplexing and digital cross connection, and feature the ability to add and drop any tributary signal flexibly. The following will describe the functions and features of add and drop multiplexers (ADMs) by taking STM-1 hierarchy as an example. Figure 1-8 illustrates the functions of an ADM.
Power
Order Wire
Alarm
TMN Interface
155Mbit/s
155Mbit/s STM-1 ADM
1.5 2 6 34 45 140 155 Mbit/s
Figure 1-8 Functions of an STM-1 ADM
Issue 2.0 January 2001 1-7
The Theory of SDH
OptiX 2500+ ESTM In addition to implementing the same signal multiplexing and demultiplexing function as a TM, the most important function of ADM is to implement the cross connection between line signals at both sides and between line signals and tributary ones. For example, the accessed tributary signal of 2Mbit/s series and 1.5Mbit/s series can be multiplexed not only into the STM-1 signal on the eastward line, but also into the STM-1 signal on the westward line. The STM-1 signals both on the eastward and westward lines can also be interconnected with each other . ADMs are widely used in chain, ring and hub networks. Please refer to Figure 1-9, 1-10 and 1-11.
TM
ADM
ADM
TM
Figure 1-9 Application in a chain network
ADM
ADM
ADM
ADM
Figure 1-10 Application in a ring network
TM
TM
ADM
TM
TM
Figure 1-11 Application in a hub network
1-8 Issue 2.0 January 2001
The Theory of SDH 3. Regenerator (REG)
OptiX 2500+ ESTM
Regenerator is responsible for signal regeneration, amplification and relaying. Compared with TMs and ADMs, REGs do not provide functions of adding and dropping services at any site. Please refer to Figure 1-12.
Power Order Wire Alarm TMN Interface
STM-N REG
STM-N
Figure 1-12 Functions of a regenerator
Regenerators are used to regenerate and relay services for long-distance transmission in various networks. 4. Digital Cross Connection Equipment (DXC) Digital cross connection equipment (DXC) is one of the important NEs in an SDH network. It provides functions of multiplexing, distribution, protection/recovery, monitoring, and network management. The core function of DXCs is cross connection. The above text describes the types of NE equipment. In practice, the selection of NE equipment is based on the location of the NE on the network, characteristics of services added and dropped, and for the convenience of network management, etc. In practical application, Huawei Technologies Co., Ltd. developed OptiX series products can be configured to any of the above types. The most common types are ADM and TM. With the development and improvement of optical amplification technique, REG is less to be used. OptiX series support a simple application of DXC.
1.1.5 Basic Topological Structure of the SDH Network
The topological structures of SDH networks basically include five types, namely chain, star, tree, ring, and mesh networks. SDH networks can make up an even more complex network based on these basic topological structures.
Issue 2.0 January 2001 1-9
The Theory of SDH 1. Chain Networks
OptiX 2500+ ESTM
Chain network is such a topological structure in which all nodes are connected in a chain, and the two nodes at both ends are directly connected. In such a structure, in order to establish a service connection between two non-adjacent nodes, all of the nodes shall be connected in between. These two nodes should cooperate to enable the connection of the same service. For example, the connection of several Add/Drop Multiplexers ((ADMB, C and D)) between two Terminal Multiplexers (TM) is a typical application of chain topological structure and an economical network topological structure at the initial application stage of SDH equipment. The basic physical topological structure of a chain network is shown in Figure 1-13.
Figure 1-13 Topological structure of a chain network
2. Star (Hub) Networks In a communication network, if there is a special node connected via direct routes with all other nodes, between which there is no direct route, this network is considered to have a star or hub topological structure. In such a structure, the service connection between any nodes other than the special hub node can only be established through route selection and transmitting via the hub node. The hub node selects route for the passing service and establishes a connection. The network topological structure connects the transmission terminals of multiple optical fibers and has the capability to manage bandwidth resources comprehensively and flexibly. Thus the investments and the operation costs can be significantly reduced. However, at the hub node, potential bottle neck of bandwidth resources and equipment failure may result in the breakdown of the entire network. The basic physical topological structure of a star network is shown in Figure 1-14.
B A D E C
Figure 1-14 Topological structure of a star network
1-10 Issue 2.0 January 2001
The Theory of SDH 3. Tree Networks
OptiX 2500+ ESTM
In a point-to-point topological structure, if any end node is connected with several other special nodes, a tree topological structure is formed. A tree topological structure can be considered as the combination of chain and star structures. It is suitable for broadcasting service. However, due to the bottle neck problem and the limitation of optical power budget, it is not suitable for providing bi-directional communication services. The basic physical topological structure of a tree network is shown in Figure 1-15.
Figure 1-15 Topological structure of a tree network
4. Ring Networks Ring networks are such communication networks in which all nodes are connected in a chain and the two end nodes at both nodes are connected together to form a ring, and no nodes are open. If the two end nodes in a chain network are connected together, the chain network becomes a ring. In such a structure, in order to establish a service connection between two non-adjacent nodes, all of the nodes in between should cooperate to enable the connection of the same service. The most obvious advantage of a ring network is its high survivability (i.e., self healing) which is essential to modern optical networks with a large capacity. Thus, the ring network enjoys a very broad application in the networking of SDH equipment. The basic physical topological structure of a ring network is shown in Figure 1-16.
Issue 2.0 January 2001 1-11
The Theory of SDH
OptiX 2500+ ESTM
A B E
Figure 1-16 Topological structure of a ring network
5. Mesh Networks Mesh networks are such communication networks in which many nodes are interconnected with each other via direct routes. In such topological structure, if direct routes are used in the interconnection of all nodes, this structure is considered as an ideal mesh topology. In a non-ideal mesh topological structure, the service connection between nodes which are not connected directly is established through route selection and transiting via other nodes. In a mesh network, no bottle neck problem or equipment failure exists. Since more than one routes can be selected between two nodes, when any equipment fails, services can still be transmitted smoothly through other routes. Thus, the reliability of service transmission is increased. However, such networks are more complicated, costly and difficult to manage. Mesh networks are very suitable for the regions with large traffic. The basic physical topological structure of a mesh network is shown in Figure 1-17.
B E C
Figure 1-17 Topological structure of a mesh network
1-12 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM As stated above, each of these topological structures has its individual features and different applications. In selecting a topological structure, many factors should be considered. For example, the network should be highly survivable, easy to configure, suitable to add new services, and simple to manage. In a practical communication network, different sections adopt different topological structure. For example, local networks (i.e. access networks or subscriber networks) normally use ring and star structures and sometimes chain structure are adopted. It may be helpful to use ring and chain topology in urban inter-exchange trunk networks. Meanwhile, toll backbone networks may require mesh topological structure. The required structure in practice should be determined according to specific situation. The OptiX series products of Huawei Technologies Co., Ltd. support all the above forms of network topological structures and their combinations.
1.2 The Frame Structure and Multiplexing of SDH Signals
1.2.1 SDH SignalSTMN Frame Structure
What kind of frame structure do SDH signals need? The arrangement of the frame structure shall ensure that the low-rate tributary signals are allocated as evenly and regularly in the frame as possible. This makes it easier to implement synchronous multiplexing, cross-connection (DXC), add/drop, and switching of tributaries. In a word, this arrangement facilitates direct adding/dropping of low-rate tributary signals to/from high-rate signals. Therefore, ITU-T defines the frame of STM-N as rectangle block frames structures in unit of byte (8bit), as illustrated in Figure 1-18.
Issue 2.0 January 2001 1-13
The Theory of SDH
OptiX 2500+ ESTM
9 270 N bytes
1 3 4 5
RSOH AU PTR MSOH payload
9 9 N 261 N
Figure 1-18 STM-N frame structure
Tips: What is a block frame? For the convenience of signal analysis, the frame structures of the signals are often illustrated as block frame structures. This is not the unique structure of SDH signals. The frame structures of PDH signals, ATM signals and data packets of packet switching are also block frames. For example, the frame of E1 (2.048M bit/s) signals is a block frame of 1 row32 columns consisting of 32 bytes. ATM signals have a block frame structure of 53 bytes. To illustrate frames structures of signals as block frames is merely for the convenience of analysis.
As shown in the above figure, the frame structure of STM-N signals is 9 rows 270N columns. The N here is equal to the N in STM-N, ranging: from 1, 4, 16, 64,. The N indicates that this signal is multiplexed by N STM-1 signals via byte interleaved multiplexing. This explains that the frame structure of STM-1 signals is a block structure of 9 rows270 columns. When N STM-1 signals are multiplexed into STM-N signal via byte interleaved multiplexing, only the columns of STM-1 signals are multiplexed via byte interleaved multiplexing. While the number of rows remains constantly 9. It is known that signals are transmitted bit-by-bit in lines. But how is the block frame transmitted in the line? Is the entire block transmitted simultaneously?
1-14 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM Of course not. STM-N signals are also transmitted bit-by-bit. Then what is the sequence of transmission? Which bits are transmitted first and which later? The principle for SDH signal frame transmission is: the bytes (8-bit ) within the frame structure is transmitted byte-by-byte (bit-by-bit) from left to right and from top to bottom. After one row is transmitted, the next row will follow. After one frame is completed, the next frame will start. What is the frame frequency (i.e. the number of frames transmitted per second) for STM-N signals? ITU-T defines the frequency to be 8000 frames per second for all levels in STM hierarchy. That means the frame length or frame period is a constant value of 125us. Maybe 8000 frames per second is familiar to you, because the frequency of E1 (2.048M bit/s) signals of PDH is also 8000 frames per second. Note that all frame frequencies of any STM hierarchical levels are 8000 frames per second. Constant frame period is a major characteristic of SDH signals. Are the frame periods of signals of different PDH hierarchical levels also the same? The constant frame period makes the rates of STM-N signals regular. For example, the data rate of STM-4 transmission is constantly 4 times that of STM-1, and STM16 is 4 times of STM4 and 16 times of STM1. But the rate of E2 (8.448M bit/s) signals of PDH is not 4 times as that of E1 (2.048M bit/s) signals. Such regularity of SDH signals makes it possible to directly add/drop low-rate SDH signals to/from high-rate SDH signals, especially for high-capacity transmission. As illustrated in Figure 1-18, the frame of STM-N consists of three parts: Section Overhead (including Regenerator Section Overhead ---- RSOH and Multiplex Section Overhead ---- MSOH) ), Administrative Unit Pointer---AU-PTR and Information Payload. Next, we will describe the functions of these three parts. 1. Information Payload The Information Payload is a place in the STM-N frame structure to store various information code blocks to be transmitted by STM-N. It functions as the "wagon box" of the truck ---STM-N. Within the box are packed low-rate signals ---- cargoes to be shipped. To monitor the possible impairment to the cargoes (the packed low-rate signals) on a real-time basis during transmission, supervisory overhead bytes ---- Path Overhead (POH) bytes are added into the signals while the low-rate signals are packed. As one part of payload, the POH, together with the information code blocks, is loaded onto STM-N and transmitted on the SDH network. The POH is in charge of monitoring, administrating and controlling (somewhat similar to a sensor) the path performances for the packed cargoes (the low-rate signals). 2. Section Overhead (SOH) The Section Overhead (SOH) refers to the auxiliary bytes which is necessary for network operation, administration and maintenance (OAM) to guarantee a normal and flexible transmission of Information Payload. For example, the Section Overhead can monitor the impairment condition of all "cargoes" in
Issue 2.0 January 2001 1-15
The Theory of SDH
OptiX 2500+ ESTM STM-N during transmission. The function of POH is to locate the certain impaired cargo in case any impairments occurs. SOH implements the overall monitoring of cargo while the POH monitors a specific cargo. SOH and POH also have some administration functions. The Section Overhead is further classified into Regenerator Section Overhead (RSOH) and Multiplex Section Overhead (MSOH). They respectively monitor their corresponding sections and layers. As mentioned above, section can be regarded as a large transmission path. The function of RSOH and MSOH is to monitor this transmission path. Then, what's the difference between RSOH and MSOH? In fact, they have different monitoring domains. For example, if 2.5G bit/s signals are transmitted in the fiber, the RSOH monitors the overall transmission performance of STM-16 while the MSOH monitors the performances of each STM-1 of the STM-16 signals.
Technical details: RSOH, MSOH and POH provide SDH signals with monitoring functions for different layers. For example, for a 2.5G bit/s system, the RSOH monitors the overall transmission performance of the STM-16 signal; the MSOH monitors the transmission performances of each STM-1 signal; and the POH monitors the transmission performances of each packaged low-rate tributary signal (e.g. 2M bit/s) in STM-1. Through these complete monitoring and management functions for all levels, you can conveniently conduct macro (overall) and micro (individual) supervision over the transmission status of the signal, and easily locate and analyze faults.
The Regenerator Section Overhead bytes in an STM-N frame are located within row 1-3 of column 1 to 9 N, 39N bytes in total . The Multiplex Section Overhead bytes in an STM-N frame are located within row 5-9 of column 1 to 9N, 59N bytes in total. Compared with the frame structure of PDH signals, the abundant section overhead is a significant characteristic of the frame structures of SDH signals. 3. Administrative Unit Pointer ---- AU-PTR The Administrative Unit Pointer is located within column 9N of row 4 of the STM-N frame and 9N bytes in total. What's the function of AU-PTR? We have mentioned before that low-rate tributary signals (e.g. 2Mbit/s) could be added/ dropped directly from high-rate SDH signals. Why is it so? Because the locations of low-rate signals within a high-rate SDH frame structure are predictable, i.e. regular. The predictability can be achieved via the pointer overhead bytes function in the SDH frame structure. The AU-PTR indicates the exact location of the first byte of the information payload within the STM-N
1-16 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM frame, so that the information payload can be properly extracted at the receiving end according to the value of this location indicator (the value of the pointer) . Let's make it more easier. Suppose that there are many goods stored in a warehouse in the unit of pile. Goods (low-rate signals) of each pile are regularly arranged (via byte interleaved multiplexing). We can locate a piece of goods within the house by only locating the pile this piece of goods belongs to. That is to say, as long as the location of the first piece of any pile is known, the precise location of any piece within the pile can be directly located according to the regularity of their arrangement. In this way you can directly carry (directly add/drop) a given piece of goods (low-rate tributary) from the warehouse. The function of AU-PTR is to indicate the location of the first piece of goods within a given pile. In fact, the pointer is further classified into high order pointer and low order pointer. The high order pointer is AU-PTR while the lower order pointer is TU-PTR (Tributary Unit Pointer). The function of TU-PTR is similar to that of AU-PTR except that the former indicates smaller "piles of goods".
1.2.2 Multiplexing Structure and Procedures of SDH
SDH multiplexing includes two types: multiplexing of lower-order SDH signals into higher-order SDH signals; and multiplexing of low-rate tributary signals (e.g. 2Mbit/s, 34Mbit/s and 140Mbit/s) into SDH signals ----STM-N. The first type of multiplexing has been mentioned above. Multiplexing is conducted mainly via byte interleaved multiplexing, and by multiplexing four into one, i.e. 4STM1STM4 and 4STM4STM16. During the multiplexing, the frame frequency remains unchanged (8000-frame per second), which means that the rate of the higher-level STM-N signals is 4 times that of the next lower-level STM-N signals. During the byte interleaved multiplexing, the information payload and pointer bytes of each frame are multiplexed via interleaved multiplexing based on their original values, while some SOH will be accepted or rejected. In a multiplexed STM-N frame, the SOH is not formed via byte interleaved multiplexing with the SOHs of all the lower-order SDH frames. Some SOHs of the lower-order frame are rejected. The detailed multiplexing method will be described in the next section. The second type of multiplexing is mostly used for multiplexing of PDH signals into the STM-N signals. There are two traditional ways to multiplex lower-rate signals into higher-rate signals: Bit inserting method (also known as the byte speed adjustment method) This method uses the bit insertion indication in a fixed location to indicate whether the inserted bit carries any signal data. It allows the multiplexed payload has a big frequency difference (asynchronous multiplexing), as there
Issue 2.0 January 2001 1-17
The Theory of SDH
OptiX 2500+ ESTM exists the process of bit insertion and de-insertion (byte speed adjustment) and the tributary signals can not be directly connected into the high-speed multiplexing signals nor lower-rate tributary signals be divided from higher-rate signals. That is to say, lower-rate tributary signals can not go on/down higher-rate signals directly, but layer by layer. This is also the multiplexing method for PDH. Fixed Position Projection Method This method utilizes the special position of a lower-rate signal in a higher-rate signal to carry lower-rate synchronous signals. It requires the lower-rate signals to be synchronous to higher-rate signals, namely, their frame frequencies shall be the same, therefore, lower-rate tributary signals can conveniently go up/down higher-rate signals directly. But when there exists frequency differences and phase differences (that is, asynchronous) between higher-rate signals and lower-rate signals, 125s (8000 frame/second) buffer shall be used to rectify the frequencies and locate the phases, thus causing signal delay and slip losses. From the above text, it can be seen that both multiplexing methods have their shortcomings. The Bit Insertion Method can not enable lower-rate tributary signals to go up/down higher-rate signals. And the Fixed Position Projection Method causes quite a long time delay of the signals accessed. The compatibility of SDH network requires the multiplexing mode of SDH shall both satisfy asynchronous multiplexing (for example, multiplexing PDH signals into STM-N) and synchronous multiplexing (such as STM-1STM-4). Meanwhile, it shall enable the high-speed STM-N signals to easily add/drop lower-speed signals without causing serious time delay of signals and slip losses. Therefore, SDH shall adopt its own multiplexing procedures and multiplexing structure. Within this multiplexing structure, the pointer adjustment and location technique is implemented to replace 125s buffer, which will rectify the frequency differences of tributary signals and adjust the phases. Each kind of service signals that are multiplexed into STM-N frame shall pass through three phases: the projection phase (equivalent to signal packaging), the location phase (equivalent to pointer adjustment) and the multiplexing phase (equivalent to byte multiplexing). ITU-T defined a complete multiplexing structure (i.e. multiplexing routes). Through these routes, digital signals of three PDH hierarchies can be multiplexed into STM-N signals via a variety of methods. The routes defined by ITU-T are illustrated in Figure 1-19.
1-18 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
N STM-N AUG
1 AU-4 VC-4 3 TUG-3 AU-3 VC-3 7 TUG-2 pointer processing 3 4 TU-12 TU-11 VC-12 VC-11 C-12 C-11 2048kbit/s 1544kbit/s 1 TU-2 VC-2 C-2 6312kbit/s C-4 1 7 C-3 44736kbit/s 34368kbit/s TU-3 VC-3 139264kbit/s 3
Multiplexing Aligning adjustment Mapping
Figure 1-19 The multiplexing mapping structure defined in Rec. G.709
As illustrated in Figure 1-19, this multiplexing structure includes some basic multiplexing units: C - Container, VC - Virtual Container, TU - Tributary Unit, TUG - Tributary Unit Group, AU - Administrative Unit, and AUG Administrative Unit Group. The suffixes of these multiplexing units denote their corresponding signal levels. As illustrated in the figure, there are several routes (several multiplexing methods) through which a valid payload can be multiplexed into STM-N signals. For example, there are two multiplexing routes for 2Mbit/s signals, i.e. two methods for multiplexing 2Mbit/s signals into STM-N signals. You may have noted that 8Mbit/s PDH signals can't be multiplexed into STM-N signals. Although there are several routes for a kind of signals to be multiplexed into SDH STM-N signals, the multiplexing route used in a country or an area must be the only one. In China, the SDH optical transmission network technological system stipulates that PDH signals based on 2Mbit/s signals shall be regarded as the valid payload of SDH and the multiplexing route of AU-4 shall be employed. This multiplexing route structure is illustrated in Figure 1-20.
N STM-N AUG 1 AU-4 VC-4 3 TUG-3 Pointer processing Multiplexing Aligning justification Mapping 1 7 TUG-2 3 TU-12 VC-12 C-12 2048kbit/s TU-3 VC-3 C-3 34368kbit/s C-4 139264kbit/s
Figure 1-20 Basic multiplexing mapping structure employed in China
Issue 2.0 January 2001 1-19
The Theory of SDH
OptiX 2500+ ESTM
1.3 Overhead
As mentioned before, the functions of overhead are to implement layered monitoring management for SDH signals. The monitoring is classified into section layer monitoring and path layer monitoring. The section layer monitoring is further classified into regenerator section layer monitoring and multiplex section layer monitoring, while the path layer monitoring is further classified into higher order path layer monitoring and lower order path layer monitoring. Thus the layered monitoring for STM-N is implemented. For example, in a 2.5G system, the regenerator section overhead monitors the overall STM-16 signal while the multiplex section overhead further monitors each of the 16 STM-1. Furthermore, the higher order path overhead monitors the VC4 of each STM-1 and the lower order path overhead can monitor each of the 63 VC12 in the VC4. Hence the multistage monitoring functions from 2.5Gbit/s to 2Mbit/s are implemented. Then, how are these monitoring functions implemented? They are implemented via different overhead bytes.
1.3.1 Section Overhead
The section overhead of the STM-N frame is located in rows 1-9 of columns 1-9N of with the frame structure. Notes: with the exception of that row 4 is AU-PTR. We are to describe the function of each section overhead byte with the example of an STM-1 signal. For an STM-1 signal, the Section Overhead includes RSOH which is located at rows 1-3 of columns 1-9, and ---RMSOH and which is located at rows 5-9 of columns 1-9 and MSOH within its frame, as illustrated in Figure 1-21.
1-20 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
9 bytes A1 A1 A1 A2 A2 A2 J0 * * F1 B1 E1 D1 D2 D3
Administrative Unit Pointer(s)
RSOH
9 rows B2 B2 B2 K1
D4 D7
D10
K2 D6 D9
D12
D5 D8
D11
MSOH
S1
M1 E2
Media dependent bytes (temporary usage) Bytes reserved for use domestic * Unscrambled bytes All unmarked bytes are reserved for future international standardization
Figure 1-21 The diagram of section overhead bytes within the STM-N frame
Figure 1-21 illustrates the location of regenerator section overhead and multiplex section overhead within the STM-1 frame. What is the difference between them? Their difference is in the monitoring scope i.e. the RSOH is corresponding to a large scope ---- STM-N, while the MSOH is corresponding to a smaller scope ---- STM-1 within the large scope. Framing bytes A1 and A2 Like a pointer, the function of the frame bytes, which is similar to that of a pointer alignment, is for localization. As we know that SDH can add/drop lower-rate tributary signals from higher-rate signals. Why? Because the receiver can align the location of the lower-rate signals within the high-rate signal via the pointers---- AU-PTR and TU-PTR. The first step of this procedure is to properly extract each STM-N frame from the received signal stream at the receiver, i.e. to align the start location of each STM-N frame, then to align the location of the corresponding lower-rate signals within each frame. This procedure is similar to locating a person in a long queue. You must first align the specific square, then align the person via the row and column within the square he is in. The function of the bytes A1 and A2 is to align the square. So the receiver can align and extract the STM-N frame from the information stream via these two bytes and further align a specific lower-rate signal within the frame via the pointers. How does the receiver align the frames via the A1 and A2 bytes? The A1 and A2 have fixed value, i.e. fixed bit patterns. A1: 11110110 (f6H) and A2: 00101000 (28H). The receiver monitors each byte in the stream. After detecting 3N successive f6H bytes followed by 3N 26H bytes (there are three
Issue 2.0 January 2001 1-21
The Theory of SDH
OptiX 2500+ ESTM A1 and three A2 bytes within an STM-1 frame), the receiver determines that an STM-N frame starts to be received. By aligning the start of each STM-N frame, the receiver can identify different STM-N frames and disassemble them. In the case of N=1, what the frames identifies are STM-1 frames. If the receiver doesn't receive correct A1 and A2 bytes within five or more successive frames (625s), i.e. it can't identify the start of five successive frames (identify different frames), it will enter out-of-frame status and generate out-of-frame alarm ---- OOF. If the OOF keeps for 3ms, the receiver will enter loss-of-frame status ---- the equipment will generate loss-of-frame alarm ---- LOF. Meanwhile, an AIS signal will be sent downward and the entire services will be interrupted. Under LOF status, if the receiver stays in normal frame alignment status again for successive 1ms or more, the equipment will restore the normal status.
Technical details: STM-N signals shall be scrambled before being transmitted via the line so that the receiver can extract timing signals from the line. But the A1 and A2 framing bytes shall not be scrambled for the receiver to properly align them. To take both requirements into consideration, the STM-N signals don't scramble the bytes in the first row (1 row9N columns, including A1 and A2 bytes ) of the section overhead but transmit them transparently while the other bytes within the STM-N frame are scrambled before transmitting via the line. Thus it is convenient to extract the timing from the STM-N signals and disassemble the STM-N signals at the receiver.
Regenerator Section Trace byte: J0 This byte is used to repeatedly transmit a Section Access Point Identifier so that a section receiver can verify its continued connection to the intended transmitter. Within the domain of a single operator, this byte may use any character. But at the boundaries between the networks of different operators, the format of J0 byte shall be the same (i.e. matched) between the receiver and transmitter of the equipment. Via J0 byte, the operator can detect and clear faults early and shorten the network restoration time. Another usage of the J0 byte is that J0 byte in each STM-N frame is defined as an STM identifier C1 and used to indicate the location of each STM-1 within the STM-N ---- indicating which STM-1 within the STM-N this STM-1 is (the value of interleave depth coordinate) and which column this C1 byte is located within the STM-1 frame (the value of the multi-column). It may be used to assist the A1 and A2 bytes in frame alignment. Data Communication Channel (DCC) byte: D1-D12
1-22 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM One of the features of SDH is its highly automation of OAM function, which can send conduct commands to issue and query data in performance auto poll to the networks element via network management terminals. SDH has some functions which are not possessed by PDH systems, such as real-time service allocation, alarm fault location and on-line performance testing. Where are these OAM data arranged to transmit? The data used for OAM functions, such as sent commands and checked alarm performance data, are transmitted via D1-D12 bytes within the STM-N frame, i.e. the related data for OAM functions are arranged in the locations of the D1-D12 bytes and transmitted by the STM-N signals via the SDH network. Thus the D1-D12 bytes provide a common data communication channel accessible to all SDH network elements. As the physical layer of the embedded control channel (ECC), the D1-D12 bytes transmit operation, administration and maintenance (OAM) information among the network elements and form a transmission channel of the SDH management network (SMN). D1, D2 and D3 are Data Channel Character of Regenerator section DCC bytes (DCCR), with a rate of 364kbit/s192kbit/s and are used to transmit OAM information among regenerator section terminals. D4-D12 are Data Channel Character of Multiplex section DCC bytes (DCCM), with a sum rate of 964kbit/s=576kbit/s, and are used to transmit OAM information among multiplex section terminals. The DCC has a total rate of 768kbit/s which provides a powerful communication base for SDH network management. Order wire bytes: E1 and E2 Each of these two bytes provides a 64kbit/s order wire channel for voice communication, i.e. voice information is transmitted via these two bytes. E1 is part of the RSOH and is used for regenerator section order wire communication. E2 is part of the MSOH and is used for direct order wire communication between terminals. For example, the network is as follows:
Multiplexer Terminal
Regenerator
Regenerator
Multiplexer Terminal
Figure 1-22 Network diagram
If only E1 byte is used as order wire byte, A, B, C and D network elements can communicate order wire. Why? Because the function of multiplexer terminals is to add/drop lower-rate tributary signals from SDH signal, RSOH
Issue 2.0 January 2001 1-23
The Theory of SDH
OptiX 2500+ ESTM and MSOH are required to be processed. So both E1 and E2 can be used to communicate order wire. The function of regenerators is signal regeneration and only RSOH is required to be processed. So E1 byte can also communicate order wire. If only E2 byte is used as order wire byte, then order wire voice communication is provided only between A and D. This is because B and C network elements don't process MSOH and E2 byte. User channel byte: F1 This byte can be used to provide 64kbit/s data/voice channel. It is reserved for user (often referring to network provider) to provide temporary order wire connections for special maintenance purposes. Bit Interleaved Parity 8 (BIP-8) byte: B1 This byte is allocated for regenerator section error monitoring (Byte B1 is located in the regenerator section overhead). What is the mechanism for monitoring? First, we'll discuss the BIP-8 parity. Suppose that a signal frame is composed of 4 bytes: A1=00110011, A2= 11001100, A3=10101010 and A4=00001111. The method of providing BIP-8 parity to this frame is to divide it into 4 blocks with 8 bits (one byte) in a parity unit (each byte as a block because one byte has 8 bits, the same as a parity unit). These blocks are arranged as illustrated in Figure 1-23.
BIP-8
A1 A2 A3 A4 B
00110011 11001100 10101010 00001111 01011010
Figure 1-23 BIP-8 parity
Compute the number of "1" over each column. Then fill a 1 in the corresponding bit of the result (B) if the number is odd, otherwise fill a 0. That is, the value of the corresponding bit of B makes the number of "1" in the corresponding column of A1A2A3A4 blocks even. This parity method is called BIP-8 parity. In fact this is an even parity since it guarantees that the number of "1" is even. B is the result of BIP-8 parity for the A1A2A3A4 block. The mechanism for B1 byte is: the transmitting equipment processes BIP-8 even parity over all bytes of the previous frame (1#STM-N) after scrambling,
1-24 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM and places the result in byte B1 of the current frame (2#STM-N) before scrambling. The receiver processes BIP-8 parity over all bits of the current frame (1#STM-N) before de-scrambling, and conducts exclusive-OR operation between the parity result and the value of B1 in the next frame (2#STM-N) after de-scrambling. If these two values are different, the result of exclusive-OR will include 1. According to the number of "1", we can monitor the number of error blocks occurred in 1#STM-N frame during transmission.
Technical details: Since error performance of higher rate signals is reflected via error blocks, the error status of STM-N signals is actually the status of error blocks. It can be seen from the BIP-8 parity method, that each bit of the parity result is corresponding to a bit block, e.g. a column of bits in Figure 1-22. So a B1 byte can at most monitor 8 error blocks from an STM-N frame that occur during transmission (The result of BIP-8 is 8 bits with each bit corresponding to a column of bits ---- a block).
Bit Interleaved Parity N24 code (BIP-N24) byte: B2 B2 is similar to B1 in operation mechanism except that it monitors the error status of the multiplex section layer. The B1 byte monitors the transmission error of the complete STM-N frame signal. There is only one B1 byte in an STM-N frame (Why? You'll get the answer when we discuss the interleaved multiplexing of the section overhead during multiplexing of STM-1 into the STM-N). The B2 bytes monitor the error performance status for each STM-1 frame within the STM-N frame. There are N3 B2 bytes in an STM-N frame, with every three B2 bytes corresponding to an STM-1 frame. The mechanism for monitoring is that the transmitting equipment computes BIP-24 (three bytes) over all bits of the previous STM-1 frame except for the RSOH (The RSOH is included in the B1 parity for the complete STM-N frame), and places the result in bytes B2 of the current frame before scrambling. The receiver processes BIP-24 parity over all bits of the current frame STM-1 after de-scrambling except for the RSOH, and conducts exclusive-OR operation between the parity result and B2 bytes in the next frame after de-scrambling. According to the number of "1" in the result of the exclusive-OR operation, we can monitor the number of error blocks occurred in this STM-1 within the STM-N frame during transmission. This method can at most monitor 24 error blocks. Note: after the transmitting equipment writes B2 bytes, the corresponding N STM-1 frames are multiplexed into an STM-N signal (there are 3N B2 bytes). At the receiver the STM-N signal is de-interleaved into N STM-1 signals, then parity is conducted for the N groups of B2 bytes. Automatic Protection Switching (APS) channel byte: K1, K2 (b1-b5) These two bytes are allocated for transmitting Automatic Protection Switching
Issue 2.0 January 2001 1-25
The Theory of SDH
OptiX 2500+ ESTM (APS) signaling, which is used to guarantee that the equipment can automatically switch on occurrence of a fault and restore the network traffic ---- self-healing. These two bytes are used for the APS self-healing of the multiplex section. Multiplex Section Remote Defect Indication (MS-RDI): K2 (b6-b8) This is an alarm message, returned to the transmitting end (source) by the receiving end (sink), which means that the receiving end has detected an incoming section defect or is receiving the Multiplex Section Alarm Indication Signal (MS-AIS). That is, when the receiving end detects receiving deterioration, it returns an MS-RDI alarm signal to the transmitting end so that the later gets to know the status of the former. If the received b6-b8 bits of the K2 is 110, it means that this signal is an MS-RDI alarm signal returned by the opposite end. If the received b6-b8 bits of the K2 is 111, it means that this signal is an MS-AIS alarm signal received by current end. Meanwhile, the current end is required to send out MS-RDI signal to the opposite end, i.e. insert 110 bit pattern into the b6-b8 of the K2 within the STM-N signal frame to be sent to the opposite end. Synchronization status byte: S1b5-b8 Different bit patterns, indicating different quality levels of clocks defined by ITU-T, enable the equipment to determine the quality of the received clock timing signal. This helps to determine whether or not to switch the clock source, i.e. switch to higher quality clock source. The smaller the value of S1 (b5-b8) is, the higher the level of clock quality is. Multiplex Section Remote Error IndicationMSREIbyte: M1 This is a message returned to its transmitting end by the receiving end. The M1 byte is used to transmit the number of error blocks detected by the receiving end via BIP-N24 (B2) so that the transmitting end can get the receiving error status of the receiving end. Media dependent bytes: bytes are used to implement special functions of the specific transmission media. For example, these bytes can be used to identify the direction of the signal when bi-directional transmission is adopted in a single fiber. All unmarked bytes are reserved for future international standardization.
1-26 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
Tips: SDH vendors usually use the reserved bytes within the section overhead of the STM frame to implement some special functions of their own equipment.
So far, the usage of bytes in the Section Overhead (RSOH, MSOH) of the STM-N frame has been discussed. Via these bytes, OAM functions of the STM-N section layer are implemented. N STM-1 frames can be multiplexed into the STM-N frame via byte-interleaved multiplexing. How is the Section Overhead multiplexed? During the byte-interleaved multiplexing, all bytes of the AU-PTR and payload within the STM-1 frames are intact and are byte-interleaved. But the multiplexing method for the Section Overhead is different. Its multiplexing method is that when N STM-1 frames are multiplexed into the STM-N frame via byte-interleaved multiplexing, the Section Overhead of the first STM-1 frame is kept while only the framing bytes and B2 bytes of the other N-1 STM-1 Section Overheads are kept and the overhead bytes left are ignored. Figure 1-24 illustrates the Section Overhead structure of an STM-4 frame.
36 bytes
* * * A1 A1 A1 A1 A1 A1 A1 A1 A1 A1 A1 A1 A2 A2 A2 A2 A2 A2 A2 A2 A2 A2 A2 A2 J0 Z0 Z0 Z0 * * * * * * * * CL
B1 D1 E1 D2 F1 D3
RSOH
Administrative Unit Pointer(s)
9rows B2 B2 B2 B2 B2 B2 B2 B2 B2 B2 B2 B2
D4 D7
D10
K1 D5 D8
D11
K2 D6 D9
D12
MSOH
S1
M1
E2
Notes: Bytes reserved for use domestic ally * Unscrambled bytes All unmarked bytes are reserved for future international standardization Z0 For future international standardization
Figure 1-24 Assignment of STM-4 SOH bytes
There is only one B1 in an STM-N while there are N 3 B2 bytes ( Since B2
Issue 2.0 January 2001 1-27
The Theory of SDH
OptiX 2500+ ESTM bytes are the result of the BIP-24 parity, each STM-1 has 3 B2 bytes, 3 8=24 bits). There is one D1-D12 byte, one E1 one E2 byte, one M1 byte, one K1 byte and one K2 byte in an STM-N frame. Why? Figure 1-25 is the structure of the STM16 Section Overhead.
144 bytes
A1 B1 D1 A1 A1 A1 A1 A1 A2 E1 D2 A2 A2 A2 A2 A2
C L
J0 F1
CL
Z*0 CL
RSOH
D3
Administrative Unit Pointer(s) 9 rows B 2
D4 D7
D10
B2
B2
B2
B2
B2
K1 D5 D8
D11
K2 D6 D9
D1 2
MSOH
S1
E2
M1
Notes: Bytes reserved for use in China * Unscrambled bytes All unmarked bytes are reserved for future international standardization Z0 For future international standardization
Figure 1-25 Assignment of the STM-16 SOH bytes
1.3.2 Path Overhead
The Section Overhead is responsible for section layer OAM functions while the Path Overhead for path layer OAM functions. Like transporting the cargoes loaded in the container: not only the overall impairment status of the cargoes (SOH) but also the impairment status of each cargo (POH) shall be monitored. According to the "width" of the monitored path ( the size of the monitored cargo) , the Path Overhead is further classified into Higher Order Path Overhead and Lower Order Path Overhead. In this curriculum the Higher Order Path Overhead refers to the monitoring of VC4 level paths which can monitor the transmission status of 140Mbit/s signal within the STM-N frame. The Lower Order Path Overhead implements the OAM functions for VC12 path level, i.e. monitoring the transmission performance of 2Mbit/s signals
1-28 Issue 2.0 January 2001
The Theory of SDH within the STM-N frame.
OptiX 2500+ ESTM
Technical details: According to the multiplexing route of the 34Mbit/s signal, the POH of the VC3 can be classified into higher order or lower order path overhead. Its bytes structure and function are the same as that of the VC4 Path Overhead. Since the multiplexing of 34Mbit/s signals into STM-N method is seldom used, the detailed description of the VC3 POH is omitted here.
1. Higher Order Path Overhead: HOPOH The Higher Order Path Overhead, consisting of 9 bytes, is located in the first column of the VC4 frame, as illustrated in Figure 1-26.
1 J1 B3 C2 G1 F2 H4 F3 K3 N1
261 1
VC4
Figure 1-26 The structure of Higher Order Path Overhead
J1Path trace byte The AU-PTR pointer indicates the specific location of the start of the VC4 within the AU-4, i.e. the location of the first byte of the VC4, so that the receiving end can properly extract VC4 from the AU-4 according to the value of this AU-PTR. The J1 is the start of the VC4, so the AU-PTR indicates the location of the J1 byte. The function of J1 is similar to that of J0. The J1 byte is used to transmit repetitively a Higher Order Path Access Point Identifier so that a path receiving terminal can verify its continued connection to the intended transmitter (this path is under continued connection). This requires that the J1 bytes of the received and transmitting ends match. The default
Issue 2.0 January 2001 1-29
The Theory of SDH
OptiX 2500+ ESTM transmit/receive J1 byte values of the equipment provided by Huawei Technologies Co., Ltd. are: SBS Huawei 155 and SBS Huawei 622 corresponding to Huawei's 155 and 622 transmission equipment respectively; Huawei SBS corresponding to Huawei 2500 transmission equipment. Of course the J1 byte can be configured and modified according to the requirement. B3Path BIP8 Code The B3 byte of path BIP-8 code is allocated for monitoring the transmission error performance of VC4 within the STM-N frame, e.g. monitoring the transmission error performance of 140Mbit/s signal within the STM-N frame. Its monitoring mechanism is similar to that of the B1 and B2 except that it is used to process BIP-8 parity for the VC4 frame. Once the receiving end detects error blocks, the number of error blocks will be displayed in the performance monitoring event ---- HP-BBE (Higher Order Path Background Block Error) of the equipment end. Meanwhile in the corresponding VC4 path performance monitoring event ---- HP-REI (Higher Order Path Remote Error Indication) of the transmitting end, the number of received error blocks will be displayed. Like the B1 and B2 bytes, this method can implement real-time monitoring over the transmission performance of the STM-N signal.
Technical details: If the B1 of the receiving end has detected error blocks, the number of error blocks detected by the B1 will be displayed in this end performance event RS-BBE (Regenerator Section Background Block Error). Notes: that doesn't return to transmitting end. If the B2 of the receiving end has detected error blocks, the number of error blocks detected by the B2 will be displayed in this end performance event MS-BBE (Multiplex Section Background Block Error). Meanwhile the corresponding number of error blocks will be displayed in the transmitting end performance event MS-REI (Multiplex Section Remote Error Indication) (The MS-REI is sent by the M1 byte).
Notes: When the error detected by the receiving end exceeds a given limitation, the equipment will report an error overflow alarm signal.
1-30 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
C2: Signal label byte The C2 is allocated to indicate the composition of multiplexing structure and information payload of the VC frame, e.g. such as equipped or unequipped status of the path, the type of loaded services and their mapping method. For example, C2=00H indicates that this VC4 path is unequipped. Then the payload TUG3 of the VC4 is required to be inserted all "1" code---- TU-AIS, and the higher order path unequipped alarm ---- HP-UNEQ appears in the equipment. C2=02H indicates that the payload of the VC4 is multiplexed via a TUG structure multiplexing route. In China, the multiplexing of 2Mbit/s signals into VC4 adopts the TUG structure, as illustrated in the attached figure. C2=15H means that the payload of the VC4 is FDDI (Fiber Distributed Data Interface) signal. To configure the multiplexing of 2Mbit/s signals for Huawei-developed equipment, the C2 is required to be configured as TUG structure in 2M signal multiplexing.
Technical details: The configuration of J1 and C2 bytes is required to ensure the consistence between the transmitting end and the receiving end ---- transmitting and receiving ends match. Otherwise, the receiving equipment will generate HP-TIM (Higher Order Path Trace Identifier Mismatch) and HP-SLM (Higher Order Signal Label Mismatch). These two alarms will make the equipment insert all "1" code---- TU-AIS alarm indication signal, into the TUG3 structure of the VC4.
G1Path status byte The G1 is allocated to convey the path terminal status and performance back to a VC4 path termination source. This feature permits the status and performance of the complete duplex path to be monitored at either end, or at any point along that path. How to comprehend it? Actually the G1 byte conveys reply messages, i.e. the messages sent from the receiving end to the transmitting end, by which the transmitting end can acquire the status of the corresponding VC4 path signal received by the receiving end. Bits 1 through 4 convey the count of error blocks in VC4 to transmit end transmitting end, i.e. HP-REI, that have been detected by the receiving end using the B3 (the path BIP-8 code). If the AIS, error overflow or J1 and C2 mismatch is detected by the receiving end, an HP-RDI (Higher Order Path Remote Defect Indication) is sent back to the transmitting end via the fifth bit of the G1 byte so that the source can know the status of the corresponding VC4 signal received by the sink, and detect and locate the fault in time. Bits 6 and 8 are reserved for future use.
Issue 2.0 January 2001 1-31
The Theory of SDH F2, F3: Path user channels bytes
OptiX 2500+ ESTM
These bytes are allocated for user order wire communication purpose between path elements (and are related to payload). H4: TU position indicator byte H4 indicates the multi-frame type of effective load and position of payloads. For example, it can be used as a multi-frame indicator for the TU-12 or as a cell boundary indicator for an ATM payload when it enters a VC4. The H4 byte is effective only when the 2Mbit/s PDH signals are multiplexed into the VC4. As mentioned above, a 2Mbit/s signal is multiplexed into a C12 as a multi-frame consisting of 4 basic frames. To properly align and extract the E1 signal, the receiver is required to know the sequence number (1, 2, 3, 4) of current basic frame within the multi-frame. The H4 byte, indicating the number of current TU-12 (VC12 or C12) within current multi-frame, has an important function as a position indicator. It ranges from 01H to 04H. If the H4 received by the receiving end is out of this range, the receiving end will generate a TU-LOM (Tributary Unit Loss of Multi-frame alarm). K3: Idle byte It is allocated for future use. The receiver is required to ignore its value. N1: Network operator byte This byte is allocated for specific management purposes. 2. Lower Order Path Overhead: LOPOH The LO-POH here refers to the path overhead of the VC12 which monitors the transmission performance of the VC12 path level, i.e. monitors the transmission status of 2Mbit/s PDH signals within the STM-N frame. Where is the LO-POH located within the VC12? Figure 1-27 displays a VC12 multi-frame structure consisting of four VC12 basic frames. The lower order POH are located in the first byte of each VC12 basic frame. An LP-POH consists of four bytes: denoted V5, J2, N2 and K4.
1-32 Issue 2.0 January 2001
The Theory of SDH
1 1 V5 4 J2 N2 K4
OptiX 2500+ ESTM
VC12
VC12
VC12
VC12
9
500us VC12 multiframe
Figure 1-27 The structure of a Lower Order Path Overhead
V5: Path status and signal label byte The V5 byte is the first byte of the multi-frame. The TU-PTR locates the start of the VC12 multi-frame within the TU12 multi-frame, i.e. the TU-PTR indicates the specific location of the V5 byte within the TU12 multi-frame. The V5 provides the functions of error check, signal label and path status of the VC12 paths. So this byte has the functions of the G1 and C2 bytes within the higher order path overhead. Figure 1-28 illustrates the structure of the V5 byte. Error Monitoring (BIP-2) Remote Error Indication (REI) 3 Remote Error Indication Remote Failure Indication (RFI) 4 Remote Failure Indication: Signal Label Remote Defect Indication (RDI ) 7 8 Remote Defect Indication (former FERF): It sends 1 if a defect is declared, otherwise it sends 0.
Error monitoring:
Signal Label:
Convey the Bit Interleaved Parity code (former BIP-2: FEBE): Bit 1 is set as such that parity of all odd number If one or more error bits in all bytes in the previous VC-12 is even. blocks were Bit 2 is set as such that detected by the BIP-2, parity of all even number bits in all bytes one1 is sent back is even. towards the VC12 path originator, and otherwise 0zero is sent.
The signal label indicates the status and mapping method of If a failure is the payload. Eight binary values declared, this are possible in these three bits: bit sends 000 VC path Unequipped VC one1, path otherwise it sends zero0. 001 VC path equipped, non specific payload 010 Asynchronous floating mapping 011 Bit synchronous floating mapping 100 Byte synchronous floating mapping
Issue 2.0 January 2001 1-33
The Theory of SDH
OptiX 2500+ ESTM
101 Reserved for future use 110 Test signal, O.181 specific mapping 111 VC-AIS
Figure 1-28 The structure of the VC12 POH (V5).
If the error blocks were detected by the receiver via the BIP-2, the number of error blocks detected by the BIP-2 is displayed in this end performance event LP-BBE (Lower Order Path Background Block Error), and meanwhile an LP-REI (Lower Order Path Remote Error Indication) is sent back to the transmitter via the b3 of the V5 byte. Thus the corresponding number of error blocks errors can be displayed in the transmitter performance event LP-REI. Bit 8 of the V5 is allocated for the VC12 Path Remote Defect Indication. An LP-RDI (Lower Order Path Remote Defect Indication) is sent back to the source if either a TU12 AIS signal or signal failure condition is being detected by the sink. Note: In this curriculum, RDI is called remote deterioration indication or remote defect indication. If the defect condition lasts beyond the maximum time allocated to the transmission protection mechanisms, the defect becomes a failure. Then an LP-RFI (Lower Order Path Remote Failure Indication) is sent back to the source via the b4 of the V5 by the sink to inform the source that a receiving failure arises on the corresponding VC12 path at the sink. b5-b7 provide a signal label. If only its value is not 0, the VC12 path is equipped, i.e. the VC12 package is not empty. If the value of b5-b7 is 000, the VC12 is unequipped and an LP-UNEQ (Lower Order Path Unequipped) alarm is aroused at the termination sink. Then all 0 code is inserted (not all 1 code ---- AIS). If the b5-b7 of V5 at the transmitter and the receiver mismatch, an LP-SLM (Lower Order Path Signal Label Mismatch) alarm is generated at the termination sink. J2VC12 path trace byte The function of the J2 is similar to that of the J0 and J1. It is used to transmit repetitively a Lower Order Path Access Point Identifier agreed mutually by the transmitter and the receiver so that the path receiving terminal can verify its continued connection to the intended transmitter. N2Network operator byte This byte is allocated for specific management purposes. K4Reserved byte
1-34 Issue 2.0 January 2001
The Theory of SDH It is reserved for future use.
OptiX 2500+ ESTM
Questions:
What did you learn from this section? This section described the layered methods of implementing the STM-N OAM functions, such as the Regenerator Section Overhead, Multiplex Section Overhead, Higher Order Path Overhead and Lower Order Path Overhead. Via those overhead bytes, you can completely monitor the whole STM-N signal and lower rate signals equipped in the STM-N frame.
Issue 2.0 January 2001 1-35
The Theory of SDH
OptiX 2500+ ESTM
1.4 Pointers
The function of the pointers is aligning via which the receiver can properly extract the corresponding VC from the STM-N, and then disassemble the VC and C packages to extract the lower rate PDH signals, i.e. directly drop lower rate tributary signals from the STM-N signal. What is aligning? Aligning is a procedure by which the frame offset information is incorporated into the Tributary Unit or the Administrative Unit, i.e. via the Tributary Unit Pointer (or Administrative Unit Pointer) attached to the VC to indicate and determine the start of the lower order VC frame within the TU payload (or the start of the higher order VC frame within the AU payload). When relative differences occur in the phases of the frames and make the VC frames "float", the pointer value will be justified to ensure that it constantly and properly designates the start of the VC frame. For a VC4, its AU-PTR indicates the location of the J1 byte while for a VC12, its TU-PTR indicates the location of the V5 byte. The TU pointer or AU pointer provides a method of allowing flexible and dynamic alignment of the VC within the TU or AU frame because these two pointers are able to accommodate differences, not only in the phases of the VC and the SDH, but also in the frame rates. Two pointers are provided: AU-PTR and TU-PTR which are used for respectively aligning of the Higher Order VC (here referring to VC4) and the Lower Order VC (here VC12) within the AU-4 and TU12 respectively. Their operation mechanisms are described below.
1.4.1 Administrative Unit Pointer AU-PTR
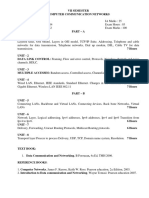
The AU-PTR, located in row 4 of columns 1 to 9 within the STM-1 frame, is used to indicate the specific location of the fist byte J1 of the VC4 within the AU-4 payload so that the receiver can properly extract the VC4, as illustrated in Figure 1-29.
1-36 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
RSOH
Negative justification opportunity Positive justification opportunity
H1YYH2FF H3H3H3 MSOH
1 - -
86
9 1
RSOH
435 436 -----522 523 -----696 697 - -
521 608 782 86
125us
H1YYH2FFH3H3H3 MSOH
--
9 1 9
Figure 1-29 The location of the AU-4 pointer in the STM frame
250us 270
As can be seen from the figure, the AU-PTR consists of 9 bytes: H1YYH2FFH3H3H3 with Y=1001SS11 (S bits are unspecified) and F=11111111. The pointer value is contained in the last ten bits of H1 and H2 bytes. In the frame, three bytes form a justification opportunity ---- a cargo unit. What is the function of the justification opportunity? Let's take the example of transporting cargoes with a truck. The cargoes ---- VC4 are continuously loaded onto the cargo box ---- information payload area three byte (one unit) -by-three byte. The stop time of the truck is 125us. 1) If the frame rate of the VC4 is higher than that of the AU-4, i.e. the package rate of AU-4 is lower than the loading rate of the VC4, then the time for loading a VC4 (cargo) is less than 125us (the stopping time of the truck). The VC4 will be continuously loaded before the truck leaves. However, the cargo box of the truck (the information payload area of AU-4) is already full and unable to accommodate more cargoes. At that time, the three H3 bytes (one justification unit) are used to accommodate the cargoes. These three H3 bytes are like a backup space temporarily added to the truck. Then the location of the all cargoes will be moved forward by one unit (three bytes), so that more cargoes [one VC4 +plus 3 bytes] can be added into the AU-4. Thus the location of each cargo unit (one unit includes 3 bytes) will be changed. This justification method is called negative justification. The three H3 bytes appear immediately after the two FF bytes are called negative justification opportunity. At that time, the three H3 bytes are filled with VC4 payload. Via this justification method, the first three bytes of the VC4 of the next truck are loaded on current truck.
Issue 2.0 January 2001 1-37
The Theory of SDH
OptiX 2500+ ESTM 2) If the frame rate of the VC4 is slower than that of the AU-4, i.e. a VC4 can't be completely loaded during the stopping time of the AU-4 "truck", then the last three bytes ---- cargo unit of the VC4 shall be transported by the next truck. Since the AU-4 hasn't been filled with VC4 (lack of a 3-byte unit), the cargo box has an spare space of 3 bytes. To prevent the cargoes from straggling during transmission due to the spare space within the cargo box, three additional H3 bytes are required to be inserted immediately after the three H3 bytes of the AU-PTR. And the H3 bytes are filled with pseudo-random information (like the stuff inserted into the space of the cargo box). Then all the 3-byte units within the VC4 are required to move backward by one unit (3 bytes). Thus the position of the cargo units will be changed accordingly. This justification method is called positive justification. The corresponding position of the three inserted H3 bytes is called positive justification opportunity. If the rate of the VC4 is much lower than that of the AU-4, more than one positive justification unit (3 H3 bytes) will be required to be inserted into the AU-4 payload area. Note that there is only one negative justification opportunity (3 H3 bytes). And the negative justification opportunity is located within the AU-PTR while the positive justification opportunity is located within the payload area of the AU-4. 3) Either positive justification or negative justification will change the location of the VC4 within the AU-4 payload, i.e. the location of the first byte of the VC4 within the AU-4 payload will be changed. Then the AU-PTR will make corresponding positive or negative justification. For the convenience of aligning each byte of the VC4 (each cargo unit, actually) within the AU-4 payload, each cargo unit is allocated with a location value, as illustrated in Figure 1-30. The location value of the 3-byte unit immediately after the H3 bytes is set as 0, and so on. Thus an AU-4 payload area has 2619/3783 locations, and the AU-PTR designates the location value of the J1 byte within the AU-4 payload. Admittedly, the AU-PTR shall be in the range of 0 to 782, otherwise it is an invalid pointer value. If invalid pointer values were received consecutively in 8 frames, the equipment will generate an AU-LOP (AU Loss of Pointer) alarm and insert an AIS alarm signal- TU-AIS. Either positive or negative justification is processed once a unit, then the pointer value will be modified incremented +1 (pointer positive justification) or decreased -1 (pointer negative justification) by one. 4) If there is no difference in the rates and the phases between the VC4 and the AU-4, i.e. the stopping time of the truck and the rate for loading the VC4 match, the AU-PTR value is 522, as indicated by the frame arrow in Figure 1-29.
Note: The AU-PTR indicates the location of the J1 byte within the next VC4 frame. In the case that the network is synchronous, the pointer justification seldom appears. So mostly the H3 bytes are filled with pseudo information.
1-38 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM As mentioned before, the pointer value is located in the last ten bits within the H1H2 bytes. Thus the value of the ten bits ranges from 0 to 1023 (210). If the AU-PTR value is not within 0-782, it is an invalid pointer value. How do the 16 bits of the H1H2 implement pointer justification control? Please see Figure 1-30.
S I
New Data Flag NDFAU/TU type means that the For AU-4 capacity of the payload has changed. and TU-3, SS=10 If no change occurs to the payload, the normal value of NNNN is "0110". Within the frame with its payload changed, the NNNN inverted to "1001" ---- NDF. The pointer value of the frame with an NDF shall be changed into the new location value of the VC, called new data. If the payload no longer changes, the NDF of the next frame shall return to the normal value "0110". No subsequent increment or decrement operation is allowed for at least three frames following this operation.
10 bit pointer value The range for AU-4 pointer is 0782 with three bytes as an offset unit. The pointer value indicates the offset between the last H3 byte of the AU-4 pointer and the first byte of the VC4 frame. Pointer justification regulation (1) During normal work, the pointer locates the start of the VC4 within the AU-4 frame. The NDF is set to "0110". (2) If the frame rate of the VC4 is lower than that of the AU-4, the inversion of the five I-bits indicates that a positive frequency justification is required. Then the start point of the VC frame is moved backward by one unit and in the subsequent frame, pointer value shall be increased by plus one. (3) If the frame rate of the VC4 is higher than that of the AU-4, the inversion of the five D-bits indicates that a negative frequency justification is required. Then the negative justification opportunity H3 bytes are overwritten with the actual information data of the VC4 and the start point of the VC frame is moved forward by one unit. In the subsequent frame, pointer value shall be decreased by minus one. (4) If the NDF appears refreshed value 1001, the change of the payload capacity is indicated. The pointer value shall be increased or decreased correspondingly, then the NDF shall return to the normal value 0110. (5) Following a pointer justification operation, no subsequent increment or decrement operation is allowed for at least three frames. (6) When the pointer is interpreted by the receiver, any variation from the current pointer value is ignored except a consistent new pointer value received three times (three frames) consecutively.
Figure 1-30 The 16-bit pointer code consisting of H1 and H2 within the AU-4
The pointer value is carried in bits 7-16 of H1 and H2. The odd number bits of the ten bits are denoted I-bits while the even number bits are denoted D-bits. The operation of the pointer value increment or decrement by one is indicated
Issue 2.0 January 2001 1-39
The Theory of SDH
OptiX 2500+ ESTM by the inversion of all or the majority of the five I-bits or five D-bits. So the I-bits are also called increment bits while the D-bits are called decrement bits. No subsequent frame pointer justification is allowed for every other three frames, i.e. if the frame in which the pointer value inversion is regarded as the first frame, the subsequent pointer inversion isn't allowed until the fifth frame (the subsequent pointer value will be increased or decreased by one). The inversion of the NDF indicates the change of the AU-4 payload. Then the pointer value will leap, i.e. the step-length of the pointer value increment or decrement is not 1one. If the receiver detects NDF inversion in eight frames consecutively, the equipment will generate an AU-LOP alarm. The receiver only interprets the received pointer which is consistent in three or more consecutive times (frames), i.e. the system considers that the pointer values of the three frames following the pointer justification are consistent. If a subsequent pointer justification occurs, a VC4 aligning error will appear at the receiver and result in transmission performance defects. In a word, if the 5 I-bits or 5 D-bits invert at the transmitter, the subsequent AU-PTR value shall be increased or decreased by one. The receiver determines whether to justify in the subsequent frame according to the inversion status of the majority of the I-bits or D-bits, i.e. to align the first byte of the VC4 and restore the timing of the signal before the pointer adaptation and alignment.
1.4.2 Tributary Unit PointerTU-PTR
The TU pointer is used to indicate the specific location of the first byte V5 of the VC12 within the TU12 payload so that the receiver can properly extract the VC12. The TU-12 pointer provides a method of allowing flexible and dynamic alignment of the VC12 within the TU-12 multi-frame. The TU-PTR is located in the bytes denoted V1, V2, V3 and V4 within the TU12 multi-frame, as illustrated in Figure 1-31. 70 74 78 71 75 72 76 73 77 105 109 113 106 110 107 108 0 111 112 4 1 5 2 6 3 7 35 36 39 40 37 41 38 42
The first 81 Basic frame structure of C-12 9 4-2 32W 2Y
The 116 8 second basic frame structure of C-12 :9 4-2 32W 1Y 1G
The third 11 basic frame structure of C-12: 94-2 32W 1Y 1G
43 The fourth 46 basic frame structure of C-12: 9 4-1 31W 1Y 1M+1N
82
85
117
120 12
15
47
50
1-40 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
86
90 94 98 102 103 104
89
93 97 101 V1
121
125 129 133 137 138 139
124 16
128 132 136 V2 20 24 28 32 33 34
19
23 27 31 V3
51
55 59 63 67 68 69
54
58 62 66 V4
Figure 1-31 Numbering of the TU-12 pointer location and offset
The TU12 PTR consists of four bytes denoted: V1, V2, V3 and V4. From the byte immediately following the V2 within the TU-12 payload, each byte is in sequence specified an offset number such as "0" and "1" according to the offset from the byte to the last V2, with one byte as a positive justification unit. Total offset numbers are from 0 to 139. The first byte V5 of the VC12 frame is located in the location with an offset number corresponding to the binary value of the TU-12 pointer value. The V3 byte of the TU-12 PTR is the negative justification opportunity. A positive justification opportunity immediately follows it. V4 is a reserved byte. The pointer value is located in the last ten bits of the V1 and V2 bytes. The function of the 16 bits of the V1 and V2 bytes is similar to that of the 16 bits of the H1 and H2 bytes within the AU-PTR.
Notes: Positive/negative justification is implemented via the V3 byte.
The justification unit of the TU-PTR is one (byte). Thus the range of the pointer value is 0 to 139. If the invalid pointer or NDF is being received in eight frames consecutively, a TU-LOP (Tributary Unit Loss of Pointer) alarm will be generated at the receiver and an AIS alarm signal shall be inserted. If there is no difference in the phases and frequencies between the VC12 and TU12, the location value of the V5 byte is 70, i.e. the TU-PTR value is 70. The pointer justification and pointer interpretation methods of the TU-PTR is similar to that of the AU-PTR.
Issue 2.0 January 2001 1-41
The Theory of SDH
OptiX 2500+ ESTM
1.5 SDH Networking Protection Methods
One of the major advantages of SDH networking is that different basic network structures can make up different combinations, thus enabling the transmission network as a whole to have the capacity to deal with network failures and enhancing the reliability of the network in operation. SDH networking mainly relies on Protection and Restoration--- these two different mechanisms, to guarantee that the communication services can be maintained in case of a failure. So-called Protection usually refers to a relatively quick transition process, whose execution is determined by the switching part automatically. As the protection function occupies some pre-pointed space between various network points, the switched paths also have also their pre-determined routes. Hereafter, we would like to introduce the networking protection mothods with the transmission equipment made by Huawei Technologies Co., Ltd. as an example. OptiX equipment supports the following four types of self-healing protection mechanisms recommended by ITU-T: 1. Route protection type Protection methods of this type include: 11 route protection (11 linear multiplexing section protection) Two-fiber unidirectional multiplexing section special protection ring Two-fiber bi-directional multiplexing section shared protection ring Two-fiber unidirectional path protection ring Two-fiber bi-directional path protection ring 2. Sub-net interconnection protection type 3. Double-point interconnection (DNI) inter-connection service protection 4. Virtual fiber shared path protection
1-42 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
1.5.1 Route Protection Type
1. 1+1 Line Protection The working principle of SDH line protection is that when the working system transmission is stopped or the performance deteriorates to a certain degree, the system switching equipment will automatically switch the key signals to the spare fiber system for transmission. It is mainly adopted to protect the transmission media and the line terminal interfaces of regenerators, TM and ADM (such as the optical/electrical and electrical/optical switching part). However, it doesn't protect the failures occurring at end TM or ADM point. OptiX equipment supports 1+1 route protection at the tributary side. And it takes less than 50ms to restore the services, even better than ITU-T recommended standard. The so-called 1+1 line protection refers to that each working system has a special designated standby system. These two systems back up each other and adopt the non-restoration mode. The source end of the main system and the backup system are interconnected and the receiving end decides whether to accept signals from the main system or the backup system according to the quality of the signals received. 1+1 line protection doesn't require the participation of APS protocol. It can be automatically executed based on whether there is any failure or shortcoming of the received signals. Or, enforced switching or locking can be performed according to the external orders. 2. Two-fiber bi-directional MS shared protection rings For two-fiber bi-directional MS shared protection rings, as their services use the common route and are transmitted bi-directionally, the time slots on the rings can be shared among all points, and their overall capacity is related with the allocation mode of the services and the number of points on the ring. At the worst, its capacity is NSTM-1. At the best, the capacity can be 0.5N MSTM-1. Here, M is the total number of points on the ring. If additional low-order services are transmitted on the protection time slots, the above-mentioned capacity can be increased by one time, thus enhancing the utilization rate of the ring capacity. For the arrangement of the service paths and protection paths of two-fiber bi-directional MS protection rings, please refer to Figure 1-32(a). By using the time slot exchanging technique, one optical fiber carries both the service path (S1) and the protection path (P2), while another optical fiber carries both the service path (S2) and the protection path (P1). Half of the paths on an optical fiber, as regulated, carries service path (S), while the other half of paths carry the protection path (P). The service path (S1) on each fiber is protected by the protection path (P1) on another fiber in the opposite direction along the ring., and V vice versa. In this way, the services can be transmitted bi-directionally. Each fiber has only one set of overhead path. An STM-N two-fiber bi-directional MS shared protection ring has N AU-4s in
Issue 2.0 January 2001 1-43
The Theory of SDH
OptiX 2500+ ESTM total. In the clockwise direction, the AU-4 time slots numbered as 1--N/2 are arranged to work as the service paths, while the AU-4 time slots numbered as N/2+1 --N working as the protection paths. In the counterclockwise direction, the time slots of the fiber are arranged in a similar way. AU-4 service path numbered as m is protected by the AU-4 numbered as N/2+m in the opposite direction in the corresponding protection path. The service capacity and the protection capacity are both N/2 AU-4s.
CA AC S1/P2 S2/P1 A D C S2/P1 S1/P2 B
CA AC
( a)
CA AC S1/P2 S2/P1 A D C S2/P1 S1/P2 B
X
CA AC
( b)
Sw t chi ng i
Figure 1-32 Diagram of two-fiber bi-directional MS shared protection ring
For a service path of any number, apart from adding at a certain point and dropping at another point, the path time slot with the same numbering can be used by more than two points according to the service volume diagram (ring path organization chart). That is, a path time slot can be multiplexed. When the fiber between BC points are cut off, as shown in Figure 1-32(b), two fibers will be cut off too. The switching switch in Point B and Point C adjacent
1-44 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM to the cut-off point will interconnect S1/P2 fiber with S2/P1 fiber. By using the time slot technique, the service signal time slots on S1/P2 fiber and S2/P1 fiber can be removed to the protection signal time slot of another fiber, thus fulfilling the protection switching function. For example, the service signal time slots from 1 to m on S1/P2 fiber can be transferred to the protection signal time slots (N/2 +1) to (N/2 +m) on S2/P1 fiber. When the failure is solved, the switching switch will usually restore the time slots to their original positions. OptiX can support two-fiber bi-directional MS protection ring, which can be normally switched under circumstances of fiber failure/deterioration at single point or multiple points, single board failure, station failure (power failure or board being plugged off) etc. In case multiple points incur failures, it can prevent services from being wrongly connected. Under any situation, the MS typical switching time required by OptiX equipment is less than the 50ms standard recommended by ITU-T. 3. Two-fiber unidirectional MS protection rings With such a ring structure, the service path and the protection path are in the same fiber. Each point has a protection switch on each high-speed wire before any tributary signal is added, as shown in Figure 1-32 (a). In normal situations, low-speed tributary signals only add or drop from S1 fiber while the protection fiber P1 remains idle.
Issue 2.0 January 2001 1-45
The Theory of SDH
OptiX 2500+ ESTM
C A A C S 1 P 1 A D C P 1 S 1 B
C A A C
(a )
C A A C S 1 P 1 A D C P 1 S 1 B
X
C A A C
S itching w
(b )
Figure 1-33 Two-fiber unidirectional MS switching
When the fiber between BC points are cut off, both fibers are cut off at the same time. The protection switches of Point B and Point C adjacent to the cut will use the APS protocol to switch to the loopback function, as shown in Figure 1-33(b). At Point B, service signals of S1 fiber go back from P1 fiber via the switch and in the counterclockwise direction, they can still get to Point C by way of Point A and Point D. And they can loop back to S1 fiber via the switching switch of Point C. The function of other points (A and D) is to ensure that the service signals transmitted on P1 fiber fulfil the normal bridging function and be successfully transmitted unblockedly to the various tributary points. Such loopback switching function can ensure the continuity of the ring even if there is a failure, thus guaranteeing the service signals on the low-rate tributary will not stop transmission. When the failure is cleared, the switch will go back to its original position.
1-46 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM Two-fiber unidirectional MS protection ring has no advantage in terms of capacity and switching speed compared with two-fiber unidirectional route loopback ring and two-fiber bi-directional MS shared ring. Therefore, it is seldom used in actual application. OptiX fully supports two-fiber unidirectional MS protection ring, whose configuration of switching conditions and switching time are quite similar to that of two-fiber bi-directional MS protection ring. 4. Two-fiber unidirectional path protection rings Two-fiber unidirectional path protection ring adopts the 1+1 protection mode and "source end bridging and end switching" structure. One fiber is the main fiber, called S fiber. The other is the standby fiber, called P fiber. The same service signals are transmitted on both fibers, but in different directions. And the receiving end chooses to receive the service signals whether from the main fiber or the spare fiber according to the quality of the signals received. As shown in Figure 1-34, at point A, the tributary signal (AC) that enters the ring and destined for point C is simultaneously fed into optical fiber S1 and P1 that are in the same direction of the signal. Here, S1 sends the same service signal to the tributary point C clockwise and P1 sends the same service signal as the protection signal to the tributary point C counterclockwise. Point C, which is the receiving end, receives the two tributary signals that are in two different directions at the same time and choose one of them to use as the tributary signal according to the quality of the tributary path signals. In normal cases, the signal transmitted by S1 fiber is used as the primary signal. Meanwhile, the tributary signal (CA) that is added to the ring at point C and destined for point A is sent to point A in the same way as above, that is, CA signal carried by S1 fiber (whose transmission direction is the same as AC signal) is used as the primary signal and diverts at point A. When the fiber is cut off at BC point, the two fibers will be cut off, as shown in Figure 1-34(b). At point C, as the AC signal coming from point A via S1 fiber is lost, according to the rule that the path with better transmission quality shall be chosen, the switching switch will turn from S1 fiber to P1 fiber to accept AC signal that comes along P1 fiber from point A, thus maintaining the AC service signals and keep them from being lost. Once the failure is removed, the switch will switch back to the original position.
Issue 2.0 January 2001 1-47
The Theory of SDH
OptiX 2500+ ESTM
CA
AC
S1 P1
A D C P1 S1 B
CA
AC
CA
(a)
AC
S1 P1
A D C P1 S1 B
X
CA AC Switching
(b)
Figure1-34 Two-fiber unidirectional path protection ring
1-48 Issue 2.0 January 2001
The Theory of SDH 5. Two-fiber bi-directional path protection rings
OptiX 2500+ ESTM
The 1+1 mode for two-fiber bi-directional path protection rings is more or less the same as that for unidirectional path protection rings. The only difference is that the return signal goes back along the opposition. The major advantage of such arrangement is that even if there is no protection ring, or the same ADM equipment is used in a linear premise, the path can be re-used, thus increasing the overall adding/dropping service handling capacity. In addition, such protection mode can ensure that the bi-directional service uses the same route, which is vital for those services sensitive to time delays (such as video frequency).
Issue 2.0 January 2001 1-49
The Theory of SDH
OptiX 2500+ ESTM
CA
AC
S1 S2
A D C P1 P2 B
CA
AC
(a)
CA AC
S1 S2
A D C P1 P2 B
X
Switching CA AC
(b)
Figure 1-35 Two-fiber bi-directional path protection ring
1-50 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM As shown in Figure 1-35 (a), the tributary path signal (AC) that enters the ring at point A and destined for point C is fed into fiber S1 and P1 at the same time, i.e. thus the so-called two-feeding in mode (1+1 protection). In particular, S1 sends the same service signal clockwise to point C. And P1 sends the same service signal counterclockwise as a protection signal to point C. Point C at the receiving end receives two tributary signals in two directions at the same time and chooses one of them as the primary tributary signal based on the quality of the tributary path signals. In normal situations, the signal sent by S1 fiber is used as the primary signal. Meanwhile, the tributary signal (CA) that adds up to the ring at point C and destined for point A is sent to point A in the same way as above, that is, CA signal carried by S2 fiber (which is in the opposite direction as AC signal) is used as the primary signal and drops the ring at point A. If the fiber between BC points is cut off, both fibers will be cut off, as shown in Figure 1-35 (b). At point C, as AC signal that goes from point A via S1 fiber is lost, based on the rule that the signal transmitted from the path with better quality shall be chosen, the switching will switch from S1 fiber to P1 fiber to accept AC signal transmitted via P1 fiber from point A as the tributary signal, thus maintaining the service signals between A and C points and prevent them from being lost. Once the failure is cleared, the switching will switch back to the original position. OptiX equipment supports both two-fiber unidirectional path protection rings and two-fiber bi-directional path protection rings. In addition, it can choose whether any path needs protection. If the OptiX equipment makes the choice that some or all of the paths need no protection, the overall add/drop service handling capacity will be increased (for STM-N path rings, based on whether the paths are all under protection or no path is under protection, its capacity may vary from NSTM-1 to 2NSTM-1.) The quality of the path signals can be judged from the path alarm signals (such as TU-AIS, TU-LOP etc.) or from the error bit status of the path signals.
1.5.2 Sub-net Connection Protection Type
Given the condition that the networking structure becomes increasingly sophisticated, Sub-net Connection Protection (SNCP) is the only service protection mode that is applicable to all kinds of network topological structures and features fast switching speed. LO/HO SNCP is the protection at the path layer and can be used in different networking structures, such as mesh and ring networks etc. As shown in Figure 1-36, SNCP adopts 1+1 protection mode. Service signals are transmitted both at the service sub-net and the protection sub-net connection. If the service sub-net connection fails or its performance deteriorates to a certain degree as stipulated, the receiving end at the sub-net connection will choose to accept the signals at the protection sub-net connection based on the rule that the signals transmitted via the path with better quality shall be chosen. As the switching is usually realized by way of single-end switching, no protocol is needed. The protected sub-net can be
Issue 2.0 January 2001 1-51
The Theory of SDH
OptiX 2500+ ESTM formed by cascading a lower-order sub-net connection with a chain connection.
Subnet A
Service SNC SNC starting end Protection SNC SNC end
Selector
NE A
NE B Subnet B
Figure 1-36 Subnet connection protection
1.5.3 DNI Inter-ring Interconnection Service Protection
The inter-connection services between ring networks can be further classified into SNI (single network node interconnection) mode and DNI (dual network node interconnection) mode. The former type can be protected by way of path protection. However, this protection mode can only protect the optical fiber and the optical sending/receiving ports. Once the interconnection node fails, the protection mode will be useless. As for the latter type, G.842 makes detailed regulations on the protection modes for inter-ring services. As G.842 recommends that the two inter-connection nodes on a ring are respectively protected via the multiplexing section shared ring and the path ring working mode, if such a protection mode is implemented, it can protect the inter-connection services between two ring networks made up of equipment by different manufacturers and whose protection modes are different. And the protection mode is even effective if the optical fiber fails or the points fail. The protection provided by OptiX equipment for inter-ring interconnection services in DNI mode fully complies with G.842 requirements. 1) Protecting the interconnection services at DNI node of a multiplexing section shared ring As shown in Figure 1-37, the services between node A of ring A and node J of Ring B are protected in DNI mode and Ring A works under the multiplexing section shared ring protection mode. Services from A to J are respectively transmitted from the interconnection dual-nodes C and D to Ring B by drop-and-continue mode, while the services from J to A transmitted via Ring B enter Ring A respectively via node C and D. Services Ts entering ring A from Node D (the master node) goes along DC optical route to point C. At Node C, after Ts and Tp which enters the ring via Node C (the primary point) pass through the choosing procedure and the one with the better quality is chosen, the chosen services will go along CBA optical route to reach Node A. In this
1-52 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM mode, the protection is effective in case of any of the following failures: failure of the master node C; failure of the slave node D; failure of the optical fiber on the ring; failure of the optical fiber between C and F and failure of the optical fiber between D and G.
B
Ring A: Multiplexing Section Shared Ring P SS
Tp
Ts
SS
Ring B: Multiplexing Section Shared Ring
I
P S SS
Point Secondary Point Service Selection Switch Protection Path Service Path
Figure 1-37 Inter-connection service protection of a multiplexing section shared ring
2) Protecting the inter-connection services at Node DNI of a path protection ring
Issue 2.0 January 2001 1-53
The Theory of SDH
OptiX 2500+ ESTM As shown in Figure 1-38, the services between point A of Ring A1 and Point I of Ring 2 are protected in DNI mode, and the services of Ring 1 are under the unidirectional path protection. The services and protection services of Ring 1 are respectively transmitted to the interconnection dual-node C and D by way of drop-and-continue mode. At Node C and D, the signals with the better transmission quality will be chosen and transmitted to Ring 2, while the services from I to A transmitted via Ring 2 respectively enter Ring 1 at Node C and Node D. The service signals that go into Ring 1 at Point C (the master node) pass along the service path to reach Node A, while the service signals that go into Ring 1 at Node D (the slave node) pass along the protection path to reach Node A. The one with the better transmission quality will be chosen out of these two signals at Node A and sent to the following point. Under this protection mode, the protection is effective even if any of the failures occurs: failure of the master node primary point C; failure of the slave node D; failure of the optical fiber on the ring; failure of the optical fiber between C and F; failure of the optical fiber between D and G.
1-54 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
B
Ring 1: Path Protection Ring
C F
D G
J
Ring 2: Path Protection
I
Path Selection Switch
Protection Path Service Path
Figure 1-38 Interconnection service protection of a path protection ring
Issue 2.0 January 2001 1-55
The Theory of SDH
OptiX 2500+ ESTM
1.5.4 Virtual-fiber Shared Path Protection
The equipment adopts the logic sub-system and enables one physical fiber to be equivalent to multiple logic fibers by using the special shared fiber virtual route protection technique. Therefore, one fiber can support multiple protection methods simultaneously as well as the combination of any of the above-mentioned protection methods on the same fiber. The protection degree can be configured as from VC12 or VC4, thus realizing the classified protection of services and the protection of complex networks.
Intrtrated service such as TV transmit-back progam,acess service
Distributed sevice such as ATM,IP service
Optcal fiber
Non-important service
Figure 1-39 Virtual-fiber shared path protection
Special shared fiber virtual route protection technique can realize classified protection of services, as well as the compound networking of equipment with different rates, thus reducing the requirements for point equipment and fiber cores when a network is set up. Therefore, this technique is extensively implemented in application of end networks and access networks. When two rings cross each other, the crossed section of the fibers can be shared via one of the two rings and use the rest part of its capacity as a virtual optical route, thus saving optical fibers and optical interface boards.
1-56 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
ADM
ADM
STM-1 Path Protection Ring
ADM
STM-4 MS Protection Ring
ADM
ADM
Figure 1-40 Virtual fiber shared route protection application
Issue 2.0 January 2001 1-57
The Theory of SDH
OptiX 2500+ ESTM
Exercises
1.What does "SDH" mean in Chinese and English? 2. Please briefly answer what are the advantages of SDH, compared with PDH? 3. What are the chain route degrees of SDH? 4. What are the basic topological structures of SDH networks? In which case are these topological structures employed? 5. What parts does the frame of STM-1 of SDH consist of? 6. Please draw out the basic multiplexing mapping structure employed in China. 7. Please briefly describe the function of the section overhead bytes---B1, E1, D1~D3 and the path overhead bytes---J1, C2. 8. What are the SDH networking protection methods?
1-58 Issue 2.0 January 2001
The Theory of SDH
OptiX 2500+ ESTM
The Theory of SDH ....................................................................................................................................................................... 1 1.1 Overview ........................................................................................................................................................................... 2 1.1.1 What is SDH? ......................................................................................................................................................... 2 1.1.2 The Characteristic of SDH over PDH .................................................................................................................... 2 1.1.3 SDH Rate Level...................................................................................................................................................... 5 1.1.4 Forms of Basic SDH Network Elements ................................................................................................................ 5 1.1.5 Basic Topological Structure of the SDH Network.................................................................................................. 9 1.2 The Frame Structure and Multiplexing of SDH Signals.................................................................................................. 13 1.2.1 SDH SignalSTMN Frame Structure ............................................................................................................. 13 1.2.2 Multiplexing Structure and Procedures of SDH ................................................................................................... 17 1.3 Overhead ......................................................................................................................................................................... 20 1.3.1 Section Overhead.................................................................................................................................................. 20 1.3.2 Path Overhead ...................................................................................................................................................... 28 1.4 Pointers............................................................................................................................................................................ 36 1.4.1 Administrative Unit Pointer AU-PTR ............................................................................................................ 36 1.4.2 Tributary Unit PointerTU-PTR..................................................................................................................... 40 1.5 SDH Networking Protection Methods............................................................................................................................. 42 1.5.1 Route Protection Type .......................................................................................................................................... 43 1.5.2 Sub-net Connection Protection Type .................................................................................................................... 51 1.5.3 DNI Inter-ring Interconnection Service Protection .............................................................................................. 52 1.5.4 Virtual-fiber Shared Path Protection..................................................................................................................... 56 Exercises................................................................................................................................................................................ 58
Issue 2.0 January 2001 1-59
Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Log Source Integration Document-Microsoft Exchange ServerDokument8 SeitenLog Source Integration Document-Microsoft Exchange ServerWadud PiulNoch keine Bewertungen
- Cisco IOS Voice Troubleshooting and Monitoring GuideDokument653 SeitenCisco IOS Voice Troubleshooting and Monitoring GuideFlavio WisnevskiNoch keine Bewertungen
- RFP Nms 070708Dokument183 SeitenRFP Nms 070708Md RajaulNoch keine Bewertungen
- TR 069 Amendment 3Dokument197 SeitenTR 069 Amendment 3Harsharan SinghNoch keine Bewertungen
- CCIE Routing and Switching Written Exam Version 5.1 (400 101)Dokument11 SeitenCCIE Routing and Switching Written Exam Version 5.1 (400 101)antonskatelbjbNoch keine Bewertungen
- 10ec71 CCN Vtu SyllabusDokument1 Seite10ec71 CCN Vtu SyllabuspatilrajucNoch keine Bewertungen
- 73 - VLAN Service ManagementDokument19 Seiten73 - VLAN Service ManagementAlexanderNoch keine Bewertungen
- Implementing and Operating Cisco Data Center Core Technologies (DCCOR) v1.0Dokument7 SeitenImplementing and Operating Cisco Data Center Core Technologies (DCCOR) v1.0Jean Jacques BelyNoch keine Bewertungen
- GXS Trading Grid® Messaging ServiceDokument17 SeitenGXS Trading Grid® Messaging ServiceGXS100% (1)
- Migracion de Protocolo IPV4 IPV6 PDFDokument24 SeitenMigracion de Protocolo IPV4 IPV6 PDFjefatura zona vNoch keine Bewertungen
- Collision Vs Broadcast Domain of Switch Using Cisco Packet TracerDokument11 SeitenCollision Vs Broadcast Domain of Switch Using Cisco Packet TracerSwarnali NathNoch keine Bewertungen
- Junos Telemetry InterfaceDokument150 SeitenJunos Telemetry InterfacedeeNoch keine Bewertungen
- Computer Networking: A Top-Down Approach Featuring The InternetDokument27 SeitenComputer Networking: A Top-Down Approach Featuring The InternetmssacNoch keine Bewertungen
- Nokia 7750 Service Router Datasheet enDokument13 SeitenNokia 7750 Service Router Datasheet enFarrukh AshfaqNoch keine Bewertungen
- Netscreen Concepts and ExamplesDokument476 SeitenNetscreen Concepts and ExamplesKeshri SekhonNoch keine Bewertungen
- 2.4.1.2 Packet Tracer - Skills Integration Challenge - ILMDokument3 Seiten2.4.1.2 Packet Tracer - Skills Integration Challenge - ILMAva BarramedaNoch keine Bewertungen
- Lab Activity - Access ListDokument6 SeitenLab Activity - Access Listvicods23Noch keine Bewertungen
- TLDK NginxDokument3 SeitenTLDK NginxmaasaNoch keine Bewertungen
- GXW 40 XXDokument59 SeitenGXW 40 XXKmaras KsaNoch keine Bewertungen
- CV - Arif - Telecom EngineerDokument3 SeitenCV - Arif - Telecom EngineerRana M. Zagham AliNoch keine Bewertungen
- L12CN :Process-to-Process Delivery, UDP, TCP, and SCTP.Dokument25 SeitenL12CN :Process-to-Process Delivery, UDP, TCP, and SCTP.Ahmad Shdifat100% (1)
- Bai Tap IPv4#1Dokument2 SeitenBai Tap IPv4#1Truc PhanNoch keine Bewertungen
- Aditabcd YamlDokument4 SeitenAditabcd Yamlyomis58398Noch keine Bewertungen
- Nortel VPN Router Configuration Contivity 221 251Dokument24 SeitenNortel VPN Router Configuration Contivity 221 251Rod MarinNoch keine Bewertungen
- DataComms ReviewerDokument11 SeitenDataComms ReviewerMagNoch keine Bewertungen
- New PE Mikrotik Configuration With ModemDokument17 SeitenNew PE Mikrotik Configuration With ModemPCL PNINoch keine Bewertungen
- Implementing Ipv6Dokument36 SeitenImplementing Ipv6Ziad AbdoNoch keine Bewertungen
- Sharing Knowledge Metro EDokument16 SeitenSharing Knowledge Metro ENiko SijabatNoch keine Bewertungen
- APG40 EricssonDokument45 SeitenAPG40 EricssonSun Rise100% (2)
- Cisco Ultra 5G Packet Core Solution: White PaperDokument20 SeitenCisco Ultra 5G Packet Core Solution: White Papersentinal123Noch keine Bewertungen