Das könnte Ihnen auch gefallen
- Partes y Exigencias de Cultivo de La Caña de AzucarDokument3 SeitenPartes y Exigencias de Cultivo de La Caña de AzucarBrayan Chavez OréNoch keine Bewertungen
- Reducto ResDokument5 SeitenReducto ResDavid Tuyo ZangaNoch keine Bewertungen
- Practica 7 - Sintesis de AcetanilidaDokument4 SeitenPractica 7 - Sintesis de Acetanilidabryan JavierNoch keine Bewertungen
- ApantarrayosDokument40 SeitenApantarrayosArmando GalvanNoch keine Bewertungen
- Resumen Judy Moody Salva El PlanetaDokument6 SeitenResumen Judy Moody Salva El PlanetaLore Arévalo Coronado100% (2)
- Destilacion AtmosféricaDokument7 SeitenDestilacion AtmosféricaangelicaNoch keine Bewertungen
- Resumen de Visita Se SachicaDokument5 SeitenResumen de Visita Se SachicaAndrés Enrique Canchano ReyesNoch keine Bewertungen
- Cohen Martin - 101 Dilemas Eticos PDFDokument465 SeitenCohen Martin - 101 Dilemas Eticos PDFNicolas ignacioNoch keine Bewertungen
- Carta Mesa IncognitaDokument8 SeitenCarta Mesa IncognitaBurgos Castro VíctorNoch keine Bewertungen
- Libro SKF y Mobil Tribología y Lubricantes (Español)Dokument91 SeitenLibro SKF y Mobil Tribología y Lubricantes (Español)Jesus N Rodriguez100% (1)
- 01 Reglamento para Transporte Con LocomotorasDokument5 Seiten01 Reglamento para Transporte Con Locomotorasrosel prudencio huamanNoch keine Bewertungen
- Estudio de Caso2 U3 Pert2 Grupal 30-07-2019Dokument8 SeitenEstudio de Caso2 U3 Pert2 Grupal 30-07-2019Steeven Tutivén Morán100% (3)
- SIUUUDokument90 SeitenSIUUUIsai CuellarNoch keine Bewertungen
- Agua de Manantial Cruz Andina Informe FinalDokument22 SeitenAgua de Manantial Cruz Andina Informe FinalArturo Ignacio Abanto100% (1)
- EE60 - Examen Parcial 15 - 2020-IIDokument2 SeitenEE60 - Examen Parcial 15 - 2020-IIAntonio de la CruzNoch keine Bewertungen
- Programa de Recomendaciones Técnicas para Tableros Eléctricos BTDokument4 SeitenPrograma de Recomendaciones Técnicas para Tableros Eléctricos BTosvaldollNoch keine Bewertungen
- 4 Dinamica Del RotorDokument4 Seiten4 Dinamica Del RotorDavid Addy Sánchez PerezNoch keine Bewertungen
- TecnologíaDokument308 SeitenTecnologíaRolandoNoch keine Bewertungen
- Empresa Constructora. TatyDokument33 SeitenEmpresa Constructora. TatyOW Alvarez100% (3)
- Dientes Rojos - Jesús CañadasDokument405 SeitenDientes Rojos - Jesús CañadasJessica BasantesNoch keine Bewertungen
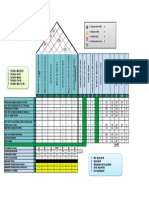
- Casa de La Calidad QDF MicehllDokument1 SeiteCasa de La Calidad QDF Micehllfer ChirinosNoch keine Bewertungen
- Manual Refer Conductores Vehículos y MotocicletasDokument98 SeitenManual Refer Conductores Vehículos y MotocicletasRobin Charly YaruroNoch keine Bewertungen
- Max SCHELERDokument2 SeitenMax SCHELERClari Venero VasquezNoch keine Bewertungen
- Marco TeoricoDokument3 SeitenMarco TeoricoMarce Herrera BeltranNoch keine Bewertungen
- UntitledDokument27 SeitenUntitledMARIA ALVARADONoch keine Bewertungen
- Clase 1. Hitos de La Biología Molecular PDFDokument32 SeitenClase 1. Hitos de La Biología Molecular PDFAlexis VeraNoch keine Bewertungen
- Mapa SueñoDokument1 SeiteMapa SueñoDiana SanchezNoch keine Bewertungen
- Los Hermanos ChapmanDokument35 SeitenLos Hermanos ChapmanXeres CiprianiNoch keine Bewertungen
- Resumen - Cianuración en BotellaDokument5 SeitenResumen - Cianuración en BotellaDiego Cortez100% (1)
- Preinforme Destilacion ContinuaDokument18 SeitenPreinforme Destilacion Continuafaser04Noch keine Bewertungen