Das könnte Ihnen auch gefallen
- ChariotDokument8 SeitenChariotNoureddine HermetienNoch keine Bewertungen
- Batterie Lithium Fer Phosphate: Détrôner le lithium-ion dans les véhicules électriques, les mobiles et les ordinateurs portablesVon EverandBatterie Lithium Fer Phosphate: Détrôner le lithium-ion dans les véhicules électriques, les mobiles et les ordinateurs portablesNoch keine Bewertungen
- GM 2Dokument39 SeitenGM 2Youcef MimouniNoch keine Bewertungen
- 07 CPT 05 LiaisonPivotRoulements Application 02Dokument3 Seiten07 CPT 05 LiaisonPivotRoulements Application 02Anthony MayNoch keine Bewertungen
- Spare Parts KZ 2022Dokument41 SeitenSpare Parts KZ 2022Marcos MarcosNoch keine Bewertungen
- TP Parametrage CATIA Etape 1Dokument7 SeitenTP Parametrage CATIA Etape 1zineb1990Noch keine Bewertungen
- Rapport Complet PFEDokument42 SeitenRapport Complet PFEthekrumpNoch keine Bewertungen
- Catia Presentation Interface Et EsquisseDokument13 SeitenCatia Presentation Interface Et EsquisseSaid EL FakkoussiNoch keine Bewertungen
- Conception D'un Joint de CardonDokument2 SeitenConception D'un Joint de CardonDhia AyadiNoch keine Bewertungen
- CATIA Générique 02 - Mechanical DesignDokument49 SeitenCATIA Générique 02 - Mechanical DesignMohamedBejjaNoch keine Bewertungen
- TD - ClavetteDokument2 SeitenTD - Clavettedhia saklyNoch keine Bewertungen
- Presentation-Totale TOTADokument24 SeitenPresentation-Totale TOTAMa HdiNoch keine Bewertungen
- Eleve La Manutention Des VehiculesDokument6 SeitenEleve La Manutention Des VehiculesATMANE ZIDOUHNoch keine Bewertungen
- MrkanfDokument62 SeitenMrkanfrabbajNoch keine Bewertungen
- MCI32 TI Technologie Des Moteurs 36Dokument36 SeitenMCI32 TI Technologie Des Moteurs 36Hamza Salloum0% (1)
- Analyse BordeuseDokument20 SeitenAnalyse BordeuseZied kallelNoch keine Bewertungen
- 1-Actions MecaniquesDokument3 Seiten1-Actions MecaniquesAbdel ElouaerNoch keine Bewertungen
- Les Courroies - ExercicesDokument4 SeitenLes Courroies - ExercicesDjamel DjamNoch keine Bewertungen
- XC 38Dokument1 SeiteXC 38sere100% (1)
- Treuil HydrauliqueDokument4 SeitenTreuil Hydraulique1s1rulliersandNoch keine Bewertungen
- MDDokument10 SeitenMDlamiabejaouiNoch keine Bewertungen
- Transmission de PuissanceDokument10 SeitenTransmission de PuissanceHamda TriguiNoch keine Bewertungen
- Limiteur de CoupleDokument24 SeitenLimiteur de CoupleNeoXana01Noch keine Bewertungen
- MCI Bielle ManivelleDokument10 SeitenMCI Bielle ManivelleAsma usmaNoch keine Bewertungen
- Realisation D Un Kart-Cross 2Dokument14 SeitenRealisation D Un Kart-Cross 2bob mukabeNoch keine Bewertungen
- Exercice Analyse Fonctionnelle Direction Part 2 MVDokument3 SeitenExercice Analyse Fonctionnelle Direction Part 2 MVYoussef YouriNoch keine Bewertungen
- Tribologie MasterDokument15 SeitenTribologie MasterabderazakNoch keine Bewertungen
- Cours CM Partie 1 PDFDokument40 SeitenCours CM Partie 1 PDFJELLALI Alaa100% (1)
- Transmission de Puissance Prof PDFDokument16 SeitenTransmission de Puissance Prof PDFRuppy MIYOUNANoch keine Bewertungen
- Exercice Sur Le Decodage Des SpecificationsDokument2 SeitenExercice Sur Le Decodage Des SpecificationsMed Ali MaatougNoch keine Bewertungen
- Corrigé TD-5 - TD de SynthèseDokument5 SeitenCorrigé TD-5 - TD de SynthèseAljawhara SaraNoch keine Bewertungen
- Embrayage Frein Et Reducteur Chauvet F - 5a0b24c81723dd160372b812 PDFDokument2 SeitenEmbrayage Frein Et Reducteur Chauvet F - 5a0b24c81723dd160372b812 PDFAssãt ÀîssātNoch keine Bewertungen
- PFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFDokument98 SeitenPFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFMouad BotteNoch keine Bewertungen
- 2RDM TD1 21.06Dokument8 Seiten2RDM TD1 21.06Constantin DamianNoch keine Bewertungen
- Accouplement GénéralitésDokument4 SeitenAccouplement Généralitésmatozo100% (1)
- Exercice OutillageDokument5 SeitenExercice OutillageOUAJIK MOSTAFA100% (1)
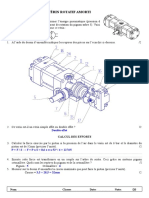
- TD - Vérin Rotatif AmortiDokument5 SeitenTD - Vérin Rotatif AmortiLAILA BNNoch keine Bewertungen
- Programme TerminaleDokument9 SeitenProgramme TerminalefatihamNoch keine Bewertungen
- Exercice Simulation SolidworksDokument2 SeitenExercice Simulation SolidworksKarim Ben SalemNoch keine Bewertungen
- Choix D'un AccouplementDokument4 SeitenChoix D'un AccouplementSlim KanounNoch keine Bewertungen
- Atelier Cao2 tp1Dokument39 SeitenAtelier Cao2 tp1adel hedhli100% (1)
- Les Freins Et Les Embrayages - PrésentationDokument14 SeitenLes Freins Et Les Embrayages - PrésentationHajar GhaziNoch keine Bewertungen
- Aciers2 PDFDokument5 SeitenAciers2 PDFMojo ShNoch keine Bewertungen
- TP Calcul Pousse SeringueDokument6 SeitenTP Calcul Pousse Seringueapi34Noch keine Bewertungen
- Cours Tolérances GEOMETRIQUES 3T-2016-2017Dokument6 SeitenCours Tolérances GEOMETRIQUES 3T-2016-2017yacine yasineNoch keine Bewertungen
- Chapitre 4 - Assembages Par Éléments FiletésDokument7 SeitenChapitre 4 - Assembages Par Éléments Filetésahidouri100% (2)
- Formation GSDDokument146 SeitenFormation GSDelyeszebdaNoch keine Bewertungen
- G PDFDokument34 SeitenG PDFyassine22100% (1)
- Étude Et Conception D'un Moteur À Combustion Interne À Quatre TempsDokument101 SeitenÉtude Et Conception D'un Moteur À Combustion Interne À Quatre TempsWendkouni Josoé OUEDRAOGONoch keine Bewertungen
- Rapport G314Dokument57 SeitenRapport G314Ayoub EL HatimyNoch keine Bewertungen
- Lecture D'un Dessin D'ensembleDokument12 SeitenLecture D'un Dessin D'ensembleMohsen Laabidi100% (1)
- Cahier de Charge (Vélo Hydrolique)Dokument17 SeitenCahier de Charge (Vélo Hydrolique)David paroleNoch keine Bewertungen
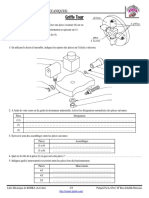
- Griffe de Tour PDFDokument3 SeitenGriffe de Tour PDFAdramé AdraméNoch keine Bewertungen
- Atelier Production2 PDFDokument63 SeitenAtelier Production2 PDFAyoub BoutoutaNoch keine Bewertungen
- M10 - Programmation Et Mise en Oeuvre Des Outils de Production À Commande NumériqueDokument56 SeitenM10 - Programmation Et Mise en Oeuvre Des Outils de Production À Commande Numériquemohamed50% (2)
- Accouplement CoursDokument4 SeitenAccouplement CoursElarbi JaffelNoch keine Bewertungen
- Catia v5 Machining Brochure FR PDFDokument8 SeitenCatia v5 Machining Brochure FR PDFWalid BenaziNoch keine Bewertungen
- Car Ross ErieDokument11 SeitenCar Ross ErieaddoudazaidNoch keine Bewertungen
- Modelisation AssemblageDokument33 SeitenModelisation AssemblageWalid NASRI100% (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesVon EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNoch keine Bewertungen
- 60 Pilotage Dun Broyeur MélangeurDokument11 Seiten60 Pilotage Dun Broyeur MélangeurromeoNoch keine Bewertungen
- Keb f5Dokument30 SeitenKeb f5Karim OuadahNoch keine Bewertungen
- ABB Coference D Ouverture 294642Dokument76 SeitenABB Coference D Ouverture 294642Souhayl KaibiNoch keine Bewertungen
- TP2 Mécanismes IndustreilDokument9 SeitenTP2 Mécanismes Industreilmorade salmiNoch keine Bewertungen
- MCC DynamiqueDokument8 SeitenMCC DynamiqueDarkedgeNoch keine Bewertungen
- Chapitre1 MCCDokument13 SeitenChapitre1 MCCArrow ArrowNoch keine Bewertungen
- Notice Sd1Dokument127 SeitenNotice Sd1Dimitri Kawasaki for everNoch keine Bewertungen
- UMA 50 HZ - 60 HZ PDFDokument40 SeitenUMA 50 HZ - 60 HZ PDFMarouane El AmeliNoch keine Bewertungen
- Plan de Cours - KORICHI MaaroufDokument8 SeitenPlan de Cours - KORICHI MaaroufBenyoucef AmelNoch keine Bewertungen
- UM28 FRDokument49 SeitenUM28 FRHîChàmBàQàsNoch keine Bewertungen
- TD VariateurDokument9 SeitenTD VariateurnawzatNoch keine Bewertungen
- FR Technical Guide No.6 REVCDokument36 SeitenFR Technical Guide No.6 REVCcatalinccNoch keine Bewertungen
- 5.moteurs À Courant ContinuDokument68 Seiten5.moteurs À Courant ContinuMohamed LahnineNoch keine Bewertungen
- DIA2ED2140502FR WebDokument77 SeitenDIA2ED2140502FR WebjiocoNoch keine Bewertungen
- Eltako Radio Eltako-RadioDokument269 SeitenEltako Radio Eltako-RadioGERARD ArnaudNoch keine Bewertungen
- BrahmiDokument5 SeitenBrahmiabfstbmsodNoch keine Bewertungen
- FSTM - FI - GET3 - S5 - TP3 - Commande Scalaire - MASDokument8 SeitenFSTM - FI - GET3 - S5 - TP3 - Commande Scalaire - MASabdessamad taoualNoch keine Bewertungen
- Cours (Sous Forme de Fascicules de TP) Commande Des Machines ElectriquesDokument54 SeitenCours (Sous Forme de Fascicules de TP) Commande Des Machines ElectriquesNoussaNoch keine Bewertungen
- TM 001 Introduction To The Protection by Fuses FRDokument37 SeitenTM 001 Introduction To The Protection by Fuses FRKDANoch keine Bewertungen
- Manitou EP7 (FR)Dokument4 SeitenManitou EP7 (FR)ManitouNoch keine Bewertungen
- Catalogue Moteurs Process Performance 9AKK105944 02-2020 FR 06Dokument150 SeitenCatalogue Moteurs Process Performance 9AKK105944 02-2020 FR 06Rafik MeksenNoch keine Bewertungen
- Piaggio Fly 150 4t USADokument237 SeitenPiaggio Fly 150 4t USAManuallesNoch keine Bewertungen
- 5.2 CNA GrafcetDokument2 Seiten5.2 CNA GrafcetPLAKOST & CIENoch keine Bewertungen
- 70k10 FDokument30 Seiten70k10 FHamza BakhtariNoch keine Bewertungen
- Qualite Des Reseaux Electriques Et Efficacite EnergetiqueDokument206 SeitenQualite Des Reseaux Electriques Et Efficacite EnergetiqueAzerty Delegfr80% (5)
- Examen Electricite Industrielle Variante ADokument2 SeitenExamen Electricite Industrielle Variante AHamza El KarchNoch keine Bewertungen
- H+F French Complet 2008 Screen Low PDFDokument130 SeitenH+F French Complet 2008 Screen Low PDFmgualdiNoch keine Bewertungen
- Motorisation Et Commande Des MachinesDokument91 SeitenMotorisation Et Commande Des MachinesIbrahima Gueye100% (1)
- W22Xd Le Nouveau Concept de Moteurs Électriques AntidéflagrantsDokument77 SeitenW22Xd Le Nouveau Concept de Moteurs Électriques AntidéflagrantsChrist Rodney MAKANANoch keine Bewertungen