Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Zip Password CrackerDokument31 SeitenZip Password CrackerMoTech100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- CWCTDokument5 SeitenCWCTtroyel99Noch keine Bewertungen
- Property Management SystemDokument48 SeitenProperty Management SystemAkshay P50% (2)
- VR and Ar Pushing Connectivity LimitsDokument24 SeitenVR and Ar Pushing Connectivity LimitsQuyVuNoch keine Bewertungen
- Charles Eisenstein - Synchronicity Myth, and The New World Order Part 1Dokument5 SeitenCharles Eisenstein - Synchronicity Myth, and The New World Order Part 1aardsnailNoch keine Bewertungen
- Section: NW2060CVB-IV (M) General ArrangementDokument1 SeiteSection: NW2060CVB-IV (M) General Arrangementdarko1969Noch keine Bewertungen
- Digital BankingDokument66 SeitenDigital BankingshyamNoch keine Bewertungen
- Licenseid TDD/FDD License DescriptionDokument34 SeitenLicenseid TDD/FDD License DescriptionfazadoNoch keine Bewertungen
- Mac Mini: User's GuideDokument106 SeitenMac Mini: User's GuideLouis WilliamsNoch keine Bewertungen
- Experiment No.7: Aim: Design Differential Amplifier Software Used: AWR Design Environment 10 TheoryDokument12 SeitenExperiment No.7: Aim: Design Differential Amplifier Software Used: AWR Design Environment 10 TheorySaurabh ChardeNoch keine Bewertungen
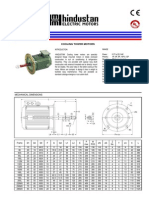
- Cooling Tower MotorDokument2 SeitenCooling Tower MotorDipendraTomarNoch keine Bewertungen
- KeyboardDokument8 SeitenKeyboardaltawanmudzharNoch keine Bewertungen
- 998-20710038 - Eliwell - NA - 2019a - Catalog - GMA - BrochureDokument60 Seiten998-20710038 - Eliwell - NA - 2019a - Catalog - GMA - BrochureTesoro HonNoch keine Bewertungen
- Amdocs Interview QuestionsDokument3 SeitenAmdocs Interview QuestionsOmkar J Goulay0% (1)
- 1298Dokument136 Seiten1298Iker BasqueAdventureNoch keine Bewertungen
- Electric Kick Scooter SwagTron Metro SK3 Official User ManualDokument21 SeitenElectric Kick Scooter SwagTron Metro SK3 Official User ManualBruno CoutoNoch keine Bewertungen
- IBM Tivoli Provisioning Manager V7.1.1 Deployment and IBM Service Management Integration Guide Sg247773Dokument762 SeitenIBM Tivoli Provisioning Manager V7.1.1 Deployment and IBM Service Management Integration Guide Sg247773bupbechanhNoch keine Bewertungen
- OTN HierarchyDokument6 SeitenOTN Hierarchyiss155Noch keine Bewertungen
- TS500Dokument10 SeitenTS500Oğuzcan ŞahinNoch keine Bewertungen
- General InformationDokument13 SeitenGeneral InformationRamón Eduardo ColmenaresNoch keine Bewertungen
- Next Level TowingDokument2 SeitenNext Level TowingAditya ChowdhuryNoch keine Bewertungen
- Parallel Port InterfacingDokument34 SeitenParallel Port InterfacingKingsprincessNoch keine Bewertungen
- Installing Screen FontsDokument5 SeitenInstalling Screen Fontsg444Noch keine Bewertungen
- Analog Modulation: Analysis and SimulationDokument6 SeitenAnalog Modulation: Analysis and Simulationramjee26Noch keine Bewertungen
- How To Make Lite Versions of KONTAKT LibrariesDokument18 SeitenHow To Make Lite Versions of KONTAKT LibrariesBerlinband 237Noch keine Bewertungen
- Core Task 2 - Ayushi BoliaDokument3 SeitenCore Task 2 - Ayushi BoliaAyushi BoliaNoch keine Bewertungen
- MS CIT 2020 Day Wise Break UpDokument32 SeitenMS CIT 2020 Day Wise Break UpathrvaNoch keine Bewertungen
- 12 Types of CNC MachinesDokument8 Seiten12 Types of CNC MachinesVirnic FarmNoch keine Bewertungen
- Appointment Confirmation: Important Instructions To Nonimmigrant Visa ApplicantsDokument3 SeitenAppointment Confirmation: Important Instructions To Nonimmigrant Visa ApplicantsDimitri D'Lost SandtoesNoch keine Bewertungen
- Course Outline - 975676461building Material and Construction IVDokument2 SeitenCourse Outline - 975676461building Material and Construction IVEndalkchew FentahunNoch keine Bewertungen