Das könnte Ihnen auch gefallen
- Operating Systems Interview Questions You'll Most Likely Be AskedVon EverandOperating Systems Interview Questions You'll Most Likely Be AskedNoch keine Bewertungen
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedVon EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedNoch keine Bewertungen
- Chapter 1 ExercisesDokument7 SeitenChapter 1 ExercisesWajid AliNoch keine Bewertungen
- Assignment 1Dokument4 SeitenAssignment 1WmshadyNoch keine Bewertungen
- Chapter 1 ExerciesesDokument5 SeitenChapter 1 ExerciesesSyedRahimAliShahNoch keine Bewertungen
- Silberschatz 7 Chapter 1 Questions and Answers: Jas::/conversion/tmp/scratch/389117979Dokument6 SeitenSilberschatz 7 Chapter 1 Questions and Answers: Jas::/conversion/tmp/scratch/389117979AbdelrahmanAbdelhamedNoch keine Bewertungen
- 1.1 A Network Computer Relies On A Centralized Computer For Most of Its SerDokument6 Seiten1.1 A Network Computer Relies On A Centralized Computer For Most of Its SerChinOrzNoch keine Bewertungen
- Tutorial 4 Solution - OSDokument6 SeitenTutorial 4 Solution - OSUnknown UnknownNoch keine Bewertungen
- Operating Systems ConceptsDokument4 SeitenOperating Systems ConceptsdrcsuNoch keine Bewertungen
- OsDokument9 SeitenOsAqeel H. YounusNoch keine Bewertungen
- HE163750 - Nguyen Quoc Huy - Part1Dokument15 SeitenHE163750 - Nguyen Quoc Huy - Part1Nguyen Quoc Huy (K16HL)Noch keine Bewertungen
- AssignmentDokument4 SeitenAssignmentMuqaddas PervezNoch keine Bewertungen
- COMP3231 80questionsDokument16 SeitenCOMP3231 80questionsGenc GashiNoch keine Bewertungen
- Excercise Solution 3-5Dokument5 SeitenExcercise Solution 3-5f21bscs008Noch keine Bewertungen
- OS Concepts Chapter 1 Solutions To Exercises Part 2Dokument2 SeitenOS Concepts Chapter 1 Solutions To Exercises Part 2Alfred Fred100% (2)
- UntitledDokument7 SeitenUntitledHazem MohamedNoch keine Bewertungen
- CH 4 (Threads)Dokument8 SeitenCH 4 (Threads)Muhammad ImranNoch keine Bewertungen
- OS - CHAP1 - Question AnswersDokument6 SeitenOS - CHAP1 - Question AnswersNoshin FaiyroozNoch keine Bewertungen
- Unit 1 - Exercise - SolutionDokument8 SeitenUnit 1 - Exercise - SolutionAnita Sofia KeyserNoch keine Bewertungen
- So2 - Tifi - Tusty Nadia Maghfira-Firda Priatmayanti-Fatthul Iman-Fedro Jordie PDFDokument9 SeitenSo2 - Tifi - Tusty Nadia Maghfira-Firda Priatmayanti-Fatthul Iman-Fedro Jordie PDFTusty Nadia MaghfiraNoch keine Bewertungen
- Questions To Practice For Cse323 Quiz 1Dokument4 SeitenQuestions To Practice For Cse323 Quiz 1errormaruf4Noch keine Bewertungen
- Assignment Os: Saqib Javed 11912Dokument8 SeitenAssignment Os: Saqib Javed 11912Saqib JavedNoch keine Bewertungen
- Distributed System Models and Issues - PGDokument14 SeitenDistributed System Models and Issues - PGMahamud elmogeNoch keine Bewertungen
- Practice Exercises: AnswerDokument4 SeitenPractice Exercises: AnswerMARYAMNoch keine Bewertungen
- RC2801B48 Home Work 1 CSE316 YogeshDokument5 SeitenRC2801B48 Home Work 1 CSE316 YogeshYogesh GandhiNoch keine Bewertungen
- Performance Analysis of N-Computing Device Under Various Load ConditionsDokument7 SeitenPerformance Analysis of N-Computing Device Under Various Load ConditionsInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- CP4253 Map Unit IiDokument23 SeitenCP4253 Map Unit IiNivi VNoch keine Bewertungen
- Practice Exercises: AnswerDokument4 SeitenPractice Exercises: AnswerFiremandeheavenly InamenNoch keine Bewertungen
- OS Plate 1Dokument5 SeitenOS Plate 1Tara SearsNoch keine Bewertungen
- OsqnansDokument13 SeitenOsqnansHinamika JainNoch keine Bewertungen
- Nust College of Eme Nismah SaleemDokument4 SeitenNust College of Eme Nismah SaleemNismah MuneebNoch keine Bewertungen
- Advanced Operating System Department: IITA Student ID: BIA110004 Name: 哈瓦尼Dokument5 SeitenAdvanced Operating System Department: IITA Student ID: BIA110004 Name: 哈瓦尼Hawani KhairulNoch keine Bewertungen
- Operating System FundamentalsDokument2 SeitenOperating System FundamentalsBegench SuhanovNoch keine Bewertungen
- Unit-3 2 Multiprocessor SystemsDokument12 SeitenUnit-3 2 Multiprocessor SystemsmirdanishmajeedNoch keine Bewertungen
- اسيمنتاتDokument48 Seitenاسيمنتاتابراهيم اشرف ابراهيم متولي زايدNoch keine Bewertungen
- Chapter 3-Processes: Mulugeta ADokument34 SeitenChapter 3-Processes: Mulugeta Amerhatsidik melkeNoch keine Bewertungen
- Assignment - 4: Name: Kaiwalya A. Kulkarni Reg - No.: 2015BCS019 Roll No.: A-18Dokument6 SeitenAssignment - 4: Name: Kaiwalya A. Kulkarni Reg - No.: 2015BCS019 Roll No.: A-18somesh shatalwarNoch keine Bewertungen
- Assignment1-Rennie Ramlochan (31.10.13)Dokument7 SeitenAssignment1-Rennie Ramlochan (31.10.13)Rennie RamlochanNoch keine Bewertungen
- Chapter 3-ProcessesDokument43 SeitenChapter 3-ProcessesAidaNoch keine Bewertungen
- Section ADokument3 SeitenSection AKaro100% (1)
- Solution Manual For Operating System Concepts Essentials 2nd Edition by SilberschatzDokument6 SeitenSolution Manual For Operating System Concepts Essentials 2nd Edition by Silberschatztina tinaNoch keine Bewertungen
- Aca Unit5Dokument13 SeitenAca Unit5karunakarNoch keine Bewertungen
- Lec2 ParallelProgrammingPlatformsDokument26 SeitenLec2 ParallelProgrammingPlatformsSAINoch keine Bewertungen
- Chapter 3Dokument25 SeitenChapter 3yomiftamiru21Noch keine Bewertungen
- PCP ChapterDokument3 SeitenPCP ChapterAyush PateriaNoch keine Bewertungen
- Java ConcurrencyDokument24 SeitenJava ConcurrencyKarthik BaskaranNoch keine Bewertungen
- Answers Chapter 1 To 4Dokument4 SeitenAnswers Chapter 1 To 4parameshwar6Noch keine Bewertungen
- CS326 Parallel and Distributed Computing: SPRING 2021 National University of Computer and Emerging SciencesDokument33 SeitenCS326 Parallel and Distributed Computing: SPRING 2021 National University of Computer and Emerging SciencesNehaNoch keine Bewertungen
- Sardar Patel College of Engineering, Bakrol: Distributed Operating SystemDokument16 SeitenSardar Patel College of Engineering, Bakrol: Distributed Operating SystemNirmalNoch keine Bewertungen
- Using Replicated Data To Reduce Backup Cost in Distributed DatabasesDokument7 SeitenUsing Replicated Data To Reduce Backup Cost in Distributed DatabasesVijay SundarNoch keine Bewertungen
- Chapter 3-ProcessesDokument40 SeitenChapter 3-Processesezra berhanuNoch keine Bewertungen
- Distributed Systems: Practice ExercisesDokument4 SeitenDistributed Systems: Practice Exercisesijigar007Noch keine Bewertungen
- Z-Distributed Computing)Dokument16 SeitenZ-Distributed Computing)Surangma ParasharNoch keine Bewertungen
- Os Assignment 2Dokument6 SeitenOs Assignment 2humairanaz100% (1)
- Dos Mid PDFDokument16 SeitenDos Mid PDFNirmalNoch keine Bewertungen
- Data Replication TechniquesDokument3 SeitenData Replication Techniquesگل گلابNoch keine Bewertungen
- OS Assignments No.2 PDFDokument4 SeitenOS Assignments No.2 PDFsheraz7288Noch keine Bewertungen
- AmandaNoverdinaP TugasBAB4Dokument3 SeitenAmandaNoverdinaP TugasBAB4amanda noverdinaNoch keine Bewertungen
- It Is The ThreadDokument17 SeitenIt Is The Threadbhageshnarnawareg1Noch keine Bewertungen
- Multiprocessor Systems:: Advanced Operating SystemDokument60 SeitenMultiprocessor Systems:: Advanced Operating SystemshaiqNoch keine Bewertungen
- CPU FlowchartsDokument11 SeitenCPU FlowchartsVinoth KumarNoch keine Bewertungen
- Module 4 Answer KeyDokument4 SeitenModule 4 Answer KeyEleunamme Zx100% (2)
- Eye TrackingDokument2 SeitenEye TrackingEleunamme ZxNoch keine Bewertungen
- Opaque: Reproduction Scale Copying Original Replica MuseumDokument2 SeitenOpaque: Reproduction Scale Copying Original Replica MuseumEleunamme ZxNoch keine Bewertungen
- Dbms TutorialDokument91 SeitenDbms TutorialEleunamme ZxNoch keine Bewertungen
- Travel Itinerary: Lstm5TDokument3 SeitenTravel Itinerary: Lstm5TEleunamme ZxNoch keine Bewertungen
- Hist Ory of Inte Rnet Hist Ory of Inte Rnet: Wikipedia Was CreatedDokument1 SeiteHist Ory of Inte Rnet Hist Ory of Inte Rnet: Wikipedia Was CreatedEleunamme ZxNoch keine Bewertungen
- 104 INVENTORY FOR May 2015Dokument2 Seiten104 INVENTORY FOR May 2015Eleunamme ZxNoch keine Bewertungen
- Business PolicyDokument3 SeitenBusiness PolicyEleunamme ZxNoch keine Bewertungen
- Unit 3 Unit 4 Unit 1 Unit 2: Module 6: Permutations and CombinationsDokument1 SeiteUnit 3 Unit 4 Unit 1 Unit 2: Module 6: Permutations and CombinationsEleunamme ZxNoch keine Bewertungen
- Room 104 Inventory For April 2015Dokument2 SeitenRoom 104 Inventory For April 2015Eleunamme ZxNoch keine Bewertungen
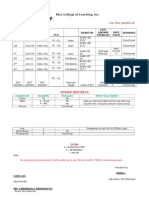
- ReportDokument1 SeiteReportEleunamme ZxNoch keine Bewertungen
- AssessmentforCfE tcm4-565505Dokument9 SeitenAssessmentforCfE tcm4-565505Eleunamme ZxNoch keine Bewertungen
- EnnDokument1 SeiteEnnEleunamme ZxNoch keine Bewertungen
- CBLM CHS NC2 Terminating and Connect of Electrical Wiring and Electronic CircuitsDokument20 SeitenCBLM CHS NC2 Terminating and Connect of Electrical Wiring and Electronic CircuitsEleunamme Zx67% (9)
- A Journey Through Western Music and ArtsDokument39 SeitenA Journey Through Western Music and ArtsEleunamme Zx100% (4)
- A Journey Through Western Music and ArtsDokument35 SeitenA Journey Through Western Music and ArtsEleunamme ZxNoch keine Bewertungen
- CBT Process FlowDokument3 SeitenCBT Process FlowEleunamme ZxNoch keine Bewertungen
- Resume 1Dokument9 SeitenResume 1Eleunamme ZxNoch keine Bewertungen
- Heart Attack SignDokument1 SeiteHeart Attack SignEleunamme ZxNoch keine Bewertungen
- MLG College of Learning, Inc: Honorees' Day and Christmas PartyDokument2 SeitenMLG College of Learning, Inc: Honorees' Day and Christmas PartyEleunamme ZxNoch keine Bewertungen
- Schedule 2013Dokument8 SeitenSchedule 2013Eleunamme ZxNoch keine Bewertungen
- Producing Better Results Through Better OrganizationDokument8 SeitenProducing Better Results Through Better OrganizationEleunamme ZxNoch keine Bewertungen
- Writing Software Requirements SpecificationsDokument14 SeitenWriting Software Requirements SpecificationsPriyank KeniNoch keine Bewertungen
- Weather Bulletin Number Two Tropical Cyclone Warning: Tropical Depression "Agaton" Issued at 5:00 PM, 17 January 2014Dokument2 SeitenWeather Bulletin Number Two Tropical Cyclone Warning: Tropical Depression "Agaton" Issued at 5:00 PM, 17 January 2014Eleunamme ZxNoch keine Bewertungen
- CH 01Dokument47 SeitenCH 01Eleunamme ZxNoch keine Bewertungen
- CH 01Dokument47 SeitenCH 01Eleunamme ZxNoch keine Bewertungen
- Networks Communicating SharingDokument33 SeitenNetworks Communicating SharingEleunamme ZxNoch keine Bewertungen
- Dot Net FolderDokument1 SeiteDot Net FolderEleunamme ZxNoch keine Bewertungen
- ScheduleDokument1 SeiteScheduleEleunamme ZxNoch keine Bewertungen
- Smar Tdate® 5: Our TechnologyDokument2 SeitenSmar Tdate® 5: Our TechnologyMatthew BaranNoch keine Bewertungen
- eCPPTv3 Labs-3 PDFDokument11 SeiteneCPPTv3 Labs-3 PDFRachid Moyse PolaniaNoch keine Bewertungen
- Operating Systems Session 12 Address TranslationDokument16 SeitenOperating Systems Session 12 Address TranslationmineNoch keine Bewertungen
- The Zero TrustDokument4 SeitenThe Zero TrustTim SongzNoch keine Bewertungen
- Task2-Identifying ComponentsDokument3 SeitenTask2-Identifying ComponentsStephanie DilloNoch keine Bewertungen
- Revised - Internship Summary ReportDokument10 SeitenRevised - Internship Summary ReportAKSHAT ANTALNoch keine Bewertungen
- Networking Essentials 6Th Edition Beasley Full ChapterDokument67 SeitenNetworking Essentials 6Th Edition Beasley Full Chapterheather.bekis553100% (7)
- User AgentDokument31 SeitenUser AgentgeorgeNoch keine Bewertungen
- Splunk-6 0 3-DistSearchDokument49 SeitenSplunk-6 0 3-DistSearchLexs TangNoch keine Bewertungen
- PowerMax+and+VMAX+Family+Configuration+and+Business+Continuity+Administration Lab+Guide Typo CorrectedDokument176 SeitenPowerMax+and+VMAX+Family+Configuration+and+Business+Continuity+Administration Lab+Guide Typo CorrectedSatyaNoch keine Bewertungen
- Week 01 Lab 01 RectangleDokument4 SeitenWeek 01 Lab 01 Rectangleulfany.guimelNoch keine Bewertungen
- Cosivis eDokument208 SeitenCosivis eZadiel MirelesNoch keine Bewertungen
- Unit 5Dokument85 SeitenUnit 5Vamsi KrishnaNoch keine Bewertungen
- Ball Thorsten Writing An Compiler in Go PDFDokument355 SeitenBall Thorsten Writing An Compiler in Go PDFKevin Sam100% (1)
- Getting Started With Scratch 3.0Dokument14 SeitenGetting Started With Scratch 3.0Francisco Javier Méndez Vázquez100% (1)
- Ise10 OverviewDokument4 SeitenIse10 OverviewsiamuntulouisNoch keine Bewertungen
- ASSIGNMENT9876Dokument11 SeitenASSIGNMENT9876Mian Talha NaveedNoch keine Bewertungen
- CA Switch - Ls-S2326tp-Ei-Ac-DatasheetDokument4 SeitenCA Switch - Ls-S2326tp-Ei-Ac-Datasheetanji201Noch keine Bewertungen
- Cyber Security Sales Play Cheat SheetDokument4 SeitenCyber Security Sales Play Cheat SheetAkshaya Bijuraj Nair100% (1)
- STM422 RS232 To RS485-RS422 Interface Converter User GuideDokument2 SeitenSTM422 RS232 To RS485-RS422 Interface Converter User GuideMojixNoch keine Bewertungen
- Lecture 06 - Algorithm Analysis PDFDokument6 SeitenLecture 06 - Algorithm Analysis PDFsonamNoch keine Bewertungen
- Laptop Clearance SpecialsDokument6 SeitenLaptop Clearance SpecialsMakhobane SibanyoniNoch keine Bewertungen
- HW 1Dokument4 SeitenHW 1Mayowa AdelekeNoch keine Bewertungen
- Q4 Activity 3Dokument1 SeiteQ4 Activity 3XEINoch keine Bewertungen
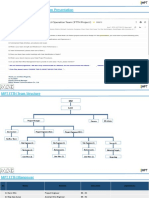
- Content: MPT FTTH Project Operation Team PresentationDokument44 SeitenContent: MPT FTTH Project Operation Team PresentationAung Thein OoNoch keine Bewertungen
- Anatomy of A CompilerDokument12 SeitenAnatomy of A CompilerJulian Cesar PerezNoch keine Bewertungen
- Te 18Dokument75 SeitenTe 18Ritika BakshiNoch keine Bewertungen
- CS8662 - Mobile Application Development Lab ManualDokument66 SeitenCS8662 - Mobile Application Development Lab ManualBharath kumar67% (3)
- Hpe Access Points: Your LogoDokument1 SeiteHpe Access Points: Your LogoNhan PhanNoch keine Bewertungen
- Lecture 1: Introduction To Java: Dr. Sapna Malik Assistant Professor, CSE Department, MSITDokument19 SeitenLecture 1: Introduction To Java: Dr. Sapna Malik Assistant Professor, CSE Department, MSITnavecNoch keine Bewertungen