Das könnte Ihnen auch gefallen
- Data Acquisition from HD Vehicles Using J1939 CAN BusVon EverandData Acquisition from HD Vehicles Using J1939 CAN BusNoch keine Bewertungen
- UDS14229Dokument42 SeitenUDS14229SimplyVeg Kumar100% (1)
- UDS Protocol Implementation in Automotiv PDFDokument6 SeitenUDS Protocol Implementation in Automotiv PDFMinhaj NaimNoch keine Bewertungen
- UDS Protocol Implementation in An ECUDokument6 SeitenUDS Protocol Implementation in An ECULayon Bruno100% (4)
- UDSDokument20 SeitenUDSjyothirmai100% (1)
- Multi-core ECU Design using AUTOSARDokument50 SeitenMulti-core ECU Design using AUTOSARDeependra MagardeNoch keine Bewertungen
- CANape Basics WhitePaper enDokument15 SeitenCANape Basics WhitePaper enwlidhaaa0% (1)
- What Is UDS Protocol - Unified Diagnostic Service in Automotive - EmbitelDokument5 SeitenWhat Is UDS Protocol - Unified Diagnostic Service in Automotive - EmbitelkrishaNoch keine Bewertungen
- UDS Protocol: Automotive Diagnostics Made EasyDokument40 SeitenUDS Protocol: Automotive Diagnostics Made EasySimhadri Thumati100% (2)
- Lesson19 Autosar PDFDokument170 SeitenLesson19 Autosar PDFBura RoxanaNoch keine Bewertungen
- OSEKDokument32 SeitenOSEKkalscribNoch keine Bewertungen
- Diagnostics 2 Raetz LectureDokument28 SeitenDiagnostics 2 Raetz LectureSajan Jose100% (1)
- Understand Autosar in 40 CharactersDokument13 SeitenUnderstand Autosar in 40 Charactersanils469Noch keine Bewertungen
- Vector CANoeDokument7 SeitenVector CANoeZaferNoch keine Bewertungen
- Autosar NotesDokument25 SeitenAutosar NotesSantoshNoch keine Bewertungen
- Uds - Iso14229-1Dokument15 SeitenUds - Iso14229-1Vinay KumarNoch keine Bewertungen
- CANoe ProductInformation enDokument43 SeitenCANoe ProductInformation enMuresan75% (4)
- Declaring and Accessing CAN Messages in CAPLDokument4 SeitenDeclaring and Accessing CAN Messages in CAPLAhmedJbeli100% (1)
- Catalog ECU Software enDokument142 SeitenCatalog ECU Software enPasupuleti Satish100% (2)
- Remote Diagnostic SystemDokument14 SeitenRemote Diagnostic SystemBoopathirajaNoch keine Bewertungen
- Automotive Embedded SystemDokument29 SeitenAutomotive Embedded SystemBhupendra Kharpuse100% (1)
- AUTOSAR Partial Network NEWDokument12 SeitenAUTOSAR Partial Network NEWBasavaraj Navalgund100% (1)
- 1 CAN Higher Layer ProtocolsDokument24 Seiten1 CAN Higher Layer ProtocolsMarcelo BelingNoch keine Bewertungen
- UDS Vehicle Diagnostics in AUTOSAR SoftwareDokument10 SeitenUDS Vehicle Diagnostics in AUTOSAR SoftwareEmbitel TechnologiesNoch keine Bewertungen
- Diagnostics Over IP For AUTOSARDokument41 SeitenDiagnostics Over IP For AUTOSAROmar Elshal100% (2)
- BootloaderDokument91 SeitenBootloadersaika_1982Noch keine Bewertungen
- AUTOSAR and Functional SafetyDokument26 SeitenAUTOSAR and Functional Safety조용규Noch keine Bewertungen
- An-IDG-1-010 How To Create UDS Protocol ServicesDokument8 SeitenAn-IDG-1-010 How To Create UDS Protocol Servicestotor42Noch keine Bewertungen
- Chap4 - Autmomotive Communication ProtocolsDokument148 SeitenChap4 - Autmomotive Communication ProtocolsKomal KalkutkarNoch keine Bewertungen
- AUTOSAR DiagnosticDokument28 SeitenAUTOSAR DiagnosticSantoshNoch keine Bewertungen
- AUTOSAR Basic Training PDFDokument62 SeitenAUTOSAR Basic Training PDFchris100% (3)
- Introduction To LIN (Local Interconnect Network)Dokument11 SeitenIntroduction To LIN (Local Interconnect Network)digitales100% (5)
- Vehicle Diagnostics PresentationDokument30 SeitenVehicle Diagnostics PresentationMOHAMEDTHAMEEN100% (2)
- Kpit Autosar HandbookDokument74 SeitenKpit Autosar HandbookBogdan Alin100% (1)
- An and 1 112 Canoe TutorialDokument25 SeitenAn and 1 112 Canoe TutorialShaddai Sg67% (3)
- UDS Protocol Implementation in Automotiv PDFDokument6 SeitenUDS Protocol Implementation in Automotiv PDFviernes06Noch keine Bewertungen
- CANoe QuickStartGuide PDFDokument80 SeitenCANoe QuickStartGuide PDFVlad ChioreanNoch keine Bewertungen
- Embedded Coder AUTOSARDokument474 SeitenEmbedded Coder AUTOSARKjfsa Tu100% (6)
- ISO14229-5 2013 11-EnDokument24 SeitenISO14229-5 2013 11-EnKorkut ErdenNoch keine Bewertungen
- Vector Webinar AUTOSAR Basics 20121009 enDokument34 SeitenVector Webinar AUTOSAR Basics 20121009 enVinu Avinash100% (4)
- Classes and Objects in CAPLDokument2 SeitenClasses and Objects in CAPLSameer KumthekarNoch keine Bewertungen
- Can Node Emulator Using The Vector Can-Tech CanalyzerDokument17 SeitenCan Node Emulator Using The Vector Can-Tech Canalyzerranamana100% (1)
- XCP ReferenceBook V1.0 ENDokument113 SeitenXCP ReferenceBook V1.0 ENbriceagcosminNoch keine Bewertungen
- CANalyzer User Guide V3 - 1Dokument213 SeitenCANalyzer User Guide V3 - 1vlsishekar0% (1)
- Autosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonDokument55 SeitenAutosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonXuân ToànNoch keine Bewertungen
- Vector Webinar AUTOSAR Testing 20111115 enDokument32 SeitenVector Webinar AUTOSAR Testing 20111115 enHai Le100% (1)
- Function and Software Development For Ecus: Cover StoryDokument6 SeitenFunction and Software Development For Ecus: Cover StorypetrishiaNoch keine Bewertungen
- Diagnostics in CanoeDokument13 SeitenDiagnostics in CanoeWolfgang StarkmannNoch keine Bewertungen
- Automotive Diagnostics Communication Protocols AnalysisKWP2000, CAN, and UDSDokument12 SeitenAutomotive Diagnostics Communication Protocols AnalysisKWP2000, CAN, and UDSInternational Organization of Scientific Research (IOSR)0% (1)
- AUTOSAR Software Engineering PraktikumDokument10 SeitenAUTOSAR Software Engineering PraktikumFarwa ZahidNoch keine Bewertungen
- Autosar PDFDokument125 SeitenAutosar PDFChethan100% (1)
- CAN Canalyser ManualDokument155 SeitenCAN Canalyser ManualAlison FosterNoch keine Bewertungen
- Interview Questions-1Dokument41 SeitenInterview Questions-1ChaitanyaBv100% (2)
- CAPL FunctionsDokument2 SeitenCAPL FunctionsAhmedJbeli100% (1)
- Transferdata 0x36 Service UDSDokument15 SeitenTransferdata 0x36 Service UDSPooraniMohan100% (4)
- Data Driven System Engineering: Automotive ECU DevelopmentVon EverandData Driven System Engineering: Automotive ECU DevelopmentNoch keine Bewertungen
- Automotive Embedded Systems Complete Self-Assessment GuideVon EverandAutomotive Embedded Systems Complete Self-Assessment GuideBewertung: 2 von 5 Sternen2/5 (1)
- Image Processing in LabVIEW For FRCDokument16 SeitenImage Processing in LabVIEW For FRCcarlos.otiniano9811Noch keine Bewertungen
- Basic Vision With LabVIEWDokument40 SeitenBasic Vision With LabVIEWDavid AlejandroNoch keine Bewertungen
- Kaun Disa Me Le KeDokument2 SeitenKaun Disa Me Le KeSunil Kumar SinghNoch keine Bewertungen
- Mathematical LogicDokument127 SeitenMathematical LogicKarl Chin Io LeongNoch keine Bewertungen
- Plastic RecyclingDokument14 SeitenPlastic RecyclingLevitaNoch keine Bewertungen
- Fa2prob3 1Dokument3 SeitenFa2prob3 1jayNoch keine Bewertungen
- Engineering Standard for Rolling Stock Minimum In-Service ConditionsDokument19 SeitenEngineering Standard for Rolling Stock Minimum In-Service Conditions4493464Noch keine Bewertungen
- 7.1 (149 Marks) : MarkschemeDokument51 Seiten7.1 (149 Marks) : MarkschemeSemwezi Enock100% (1)
- Return On Marketing InvestmentDokument16 SeitenReturn On Marketing Investmentraj_thanviNoch keine Bewertungen
- Grade 5 PPT English Q4 W3 Day 2Dokument17 SeitenGrade 5 PPT English Q4 W3 Day 2Rommel MarianoNoch keine Bewertungen
- Science 7 Module1Dokument22 SeitenScience 7 Module1Hector Panti0% (1)
- CeramicsDokument39 SeitenCeramicsD4-dc1 Kelas100% (1)
- Shoulder Impingement SyndromeDokument37 SeitenShoulder Impingement SyndromeDADDYGUS100% (1)
- Corporations Defined and FormedDokument16 SeitenCorporations Defined and FormedSheryn Mae AlinNoch keine Bewertungen
- All India CW Pricelist Wef 01.05.2021Dokument6 SeitenAll India CW Pricelist Wef 01.05.2021Sameer PadhyNoch keine Bewertungen
- 28 GHZ Millimeter Wave Cellular Communication Measurements For Reflection and Penetration Loss in and Around Buildings in New York CityDokument5 Seiten28 GHZ Millimeter Wave Cellular Communication Measurements For Reflection and Penetration Loss in and Around Buildings in New York CityJunyi LiNoch keine Bewertungen
- Application Sheet: Series CW SeriesDokument2 SeitenApplication Sheet: Series CW SerieskamalNoch keine Bewertungen
- Accenture Faq For New JoinersDokument4 SeitenAccenture Faq For New JoinersBaazinow Hack Brainbaazi Live AnswersNoch keine Bewertungen
- Deed of Sale for 2009 Toyota PickupDokument1 SeiteDeed of Sale for 2009 Toyota PickupRheal P Esmail100% (3)
- Project Proposal ApprovedDokument2 SeitenProject Proposal ApprovedRonnel BechaydaNoch keine Bewertungen
- GI Tags Complete ListDokument17 SeitenGI Tags Complete Listrameshb87Noch keine Bewertungen
- Cambridge Ext2 Ch1 Complex Numbers IWEBDokument62 SeitenCambridge Ext2 Ch1 Complex Numbers IWEBchenNoch keine Bewertungen
- Speed Limits in The PhilippinesDokument4 SeitenSpeed Limits in The Philippinesmark carloNoch keine Bewertungen
- Salting-Out Crystallisation Using NH Ina Laboratory-Scale Gas Lift ReactorDokument10 SeitenSalting-Out Crystallisation Using NH Ina Laboratory-Scale Gas Lift ReactorChester LowreyNoch keine Bewertungen
- Attaei PDFDokument83 SeitenAttaei PDFHandsomē KumarNoch keine Bewertungen
- A Cranial Approach To Sinus Congestion: By, Nathan Widboom D.ODokument31 SeitenA Cranial Approach To Sinus Congestion: By, Nathan Widboom D.ONancyNoch keine Bewertungen
- Next-Generation Widebody Conversion: in Service From 2017 ONWARDSDokument6 SeitenNext-Generation Widebody Conversion: in Service From 2017 ONWARDSAgusNoch keine Bewertungen
- Trainee Accountant Job DescriptionDokument5 SeitenTrainee Accountant Job DescriptionNelly PilcoNoch keine Bewertungen
- TM 5-5031 HOLLINGSWORTH GENERATORS CE-51-DC AND DC - WK2 MODELS, 1953Dokument16 SeitenTM 5-5031 HOLLINGSWORTH GENERATORS CE-51-DC AND DC - WK2 MODELS, 1953Advocate100% (1)
- SSC CGL 13th Dec 2022 Shift-4 by CrackuDokument29 SeitenSSC CGL 13th Dec 2022 Shift-4 by CrackuyuviNoch keine Bewertungen
- TMP 841704 RL 2023-03-13 Relieving LetterDokument1 SeiteTMP 841704 RL 2023-03-13 Relieving Letterxop0887Noch keine Bewertungen
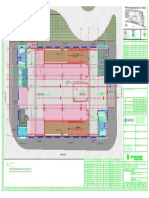
- Key plan and area statement comparison for multi-level car park (MLCPDokument1 SeiteKey plan and area statement comparison for multi-level car park (MLCP121715502003 BOLLEMPALLI BINDU SREE SATYANoch keine Bewertungen
- CT2003 LevelMeasurementP1 TechReport1 1Dokument27 SeitenCT2003 LevelMeasurementP1 TechReport1 1Vignesh RajanNoch keine Bewertungen