Das könnte Ihnen auch gefallen
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- Lab Manual # 12 (LCS) (2018-CPE-07)Dokument7 SeitenLab Manual # 12 (LCS) (2018-CPE-07)Momel FatimaNoch keine Bewertungen
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkVon EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNoch keine Bewertungen
- Processcontrol Topic13 PidtuningDokument15 SeitenProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- Distributed Model Predictive Control for Plant-Wide SystemsVon EverandDistributed Model Predictive Control for Plant-Wide SystemsNoch keine Bewertungen
- Controller Design Based On Transient Response CriteriaDokument20 SeitenController Design Based On Transient Response CriteriaGapuk MaboekNoch keine Bewertungen
- Controller Tuning: A Motivational ExampleDokument58 SeitenController Tuning: A Motivational ExampleAnas OdehNoch keine Bewertungen
- Model Based TuningDokument39 SeitenModel Based TuningAulia PerdanaNoch keine Bewertungen
- Lecture Note Chapter 11 PID Controller Design Tuning and Troubleshooting 2016Dokument61 SeitenLecture Note Chapter 11 PID Controller Design Tuning and Troubleshooting 2016Rama KrishnaNoch keine Bewertungen
- Vilanova - Pid Tuning For Cascade Control System DesignDokument4 SeitenVilanova - Pid Tuning For Cascade Control System DesignCarlos BellatinNoch keine Bewertungen
- DP 8955Dokument97 SeitenDP 8955Krishna KishoreNoch keine Bewertungen
- Robust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduDokument4 SeitenRobust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduInnovative Research PublicationsNoch keine Bewertungen
- Ee 4314 ComphnvhvnDokument26 SeitenEe 4314 ComphnvhvnSALIMSEIF1Noch keine Bewertungen
- Chapter 12Dokument58 SeitenChapter 12Nigel KowNoch keine Bewertungen
- Lab Manual # 11 (LCS) (2018-CPE-07)Dokument4 SeitenLab Manual # 11 (LCS) (2018-CPE-07)Momel FatimaNoch keine Bewertungen
- Controlling of D.C. Motor Using Fuzzy Logic Controller: Husain AhmedDokument5 SeitenControlling of D.C. Motor Using Fuzzy Logic Controller: Husain AhmedCristian SsggNoch keine Bewertungen
- Ee3304 hw1 SLNDokument11 SeitenEe3304 hw1 SLNzerocoderNoch keine Bewertungen
- S S TF: 3. Controller Design CalculationsDokument6 SeitenS S TF: 3. Controller Design CalculationsJoy MatiwaneNoch keine Bewertungen
- Control System AnalysisDokument33 SeitenControl System AnalysisAnonymous TJRX7CNoch keine Bewertungen
- Eee 336 L7Dokument48 SeitenEee 336 L7Rezwan ZakariaNoch keine Bewertungen
- Digital PID Controllers: Different Forms of PIDDokument11 SeitenDigital PID Controllers: Different Forms of PIDสหายดิว ลูกพระอาทิตย์Noch keine Bewertungen
- PID Tuning Rules For Second OrderDokument6 SeitenPID Tuning Rules For Second OrderAlexShearNoch keine Bewertungen
- Print It 2Dokument5 SeitenPrint It 2shihab4806Noch keine Bewertungen
- Cascaded PIDDokument14 SeitenCascaded PIDTatenda BizureNoch keine Bewertungen
- Make It Easier For Other People To Find Your Content by Providing More Information About It.Dokument45 SeitenMake It Easier For Other People To Find Your Content by Providing More Information About It.Osy OsyNoch keine Bewertungen
- Controller Design Based On Transient Response CriteriaDokument45 SeitenController Design Based On Transient Response CriteriaVijay RajaindranNoch keine Bewertungen
- Lecture I - Introduction To PID Control SystemDokument47 SeitenLecture I - Introduction To PID Control SystemR.W. SaputraNoch keine Bewertungen
- Journal of Chemical Engineering of Japan, Vol. 40, No. 6Dokument10 SeitenJournal of Chemical Engineering of Japan, Vol. 40, No. 6ShamsMohdNoch keine Bewertungen
- Closed-Loopautomatic Tuning of PID Controller For Nonlinear SystemsDokument7 SeitenClosed-Loopautomatic Tuning of PID Controller For Nonlinear SystemsVictor YuzhaninNoch keine Bewertungen
- Direct Synthesis Method - Based Controller Design For Cold Rolling MillDokument8 SeitenDirect Synthesis Method - Based Controller Design For Cold Rolling MillAriel Alejo BlancoNoch keine Bewertungen
- Analytical Design of PID Controller Cascaded With A Lead-Lag Filter For Time-Delay ProcessesDokument9 SeitenAnalytical Design of PID Controller Cascaded With A Lead-Lag Filter For Time-Delay ProcessesniluNoch keine Bewertungen
- PID ControllerDokument4 SeitenPID ControllerHammad KhanNoch keine Bewertungen
- Simple Fuzzy PID Controllers For DC-DC Converters: K.-W. Seo and Han Ho ChoiDokument6 SeitenSimple Fuzzy PID Controllers For DC-DC Converters: K.-W. Seo and Han Ho Choiankit407Noch keine Bewertungen
- Stability of Linear Feedback SystemDokument49 SeitenStability of Linear Feedback SystemNANDHAKUMAR ANoch keine Bewertungen
- Load Evaluation PDFDokument9 SeitenLoad Evaluation PDFMois DanielNoch keine Bewertungen
- Chapter 10 PID ControlsDokument35 SeitenChapter 10 PID ControlsRiski SepTiadi RasyaNoch keine Bewertungen
- Cohan Coon and Zigler Nichols Method of Tuning P.I.D ControllerDokument5 SeitenCohan Coon and Zigler Nichols Method of Tuning P.I.D ControllerUtkarsh SinghNoch keine Bewertungen
- Advanced PID Controller ImplementationDokument13 SeitenAdvanced PID Controller Implementationlizhi0007100% (1)
- Implementation of A PID Control System On Microcontroller (DC Motor Case Study)Dokument5 SeitenImplementation of A PID Control System On Microcontroller (DC Motor Case Study)Monata Sera100% (1)
- Assignment 2 - Adv CTL 2020Dokument7 SeitenAssignment 2 - Adv CTL 2020Thành Trung Nguyễn QuáchNoch keine Bewertungen
- 4.2 Tests of Structural Changes: X y X yDokument8 Seiten4.2 Tests of Structural Changes: X y X ySaifullahJaspalNoch keine Bewertungen
- Modeling of Prototype: Gas Gs S Gas Gs SDokument8 SeitenModeling of Prototype: Gas Gs S Gas Gs SAshley TillmanNoch keine Bewertungen
- Math 5Dokument37 SeitenMath 5Anonymous UrzdtCB0INoch keine Bewertungen
- Auto-Tuning of PID Controllers Via Extremum SeekingDokument6 SeitenAuto-Tuning of PID Controllers Via Extremum SeekingjuliiojaiimesNoch keine Bewertungen
- Adaptive PID With Sliding Mode Control For The Rotary InvertedDokument6 SeitenAdaptive PID With Sliding Mode Control For The Rotary InvertedImee RistikaNoch keine Bewertungen
- Control ReportDokument15 SeitenControl ReportKenshow Large50% (2)
- Optimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesDokument6 SeitenOptimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesAnonymous WkbmWCa8MNoch keine Bewertungen
- Submitted by Vikrant Rana CH-6276Dokument30 SeitenSubmitted by Vikrant Rana CH-6276vcoolkrazyNoch keine Bewertungen
- DC Motor Speed Control Using Pid Controller: June 2005Dokument6 SeitenDC Motor Speed Control Using Pid Controller: June 2005Juan Jose Borra GarciaNoch keine Bewertungen
- 8.1. Lab ObjectiveDokument6 Seiten8.1. Lab ObjectiveJang-Suh Justin LeeNoch keine Bewertungen
- Optimal Setting For Discrete PID Controllers: Ar+f+lDokument10 SeitenOptimal Setting For Discrete PID Controllers: Ar+f+lingjojedaNoch keine Bewertungen
- Speed Control of DC Motor Using Pid Controller Based On MatlabDokument8 SeitenSpeed Control of DC Motor Using Pid Controller Based On MatlabAlexander DeckerNoch keine Bewertungen
- Development of Active Suspension System For Automobiles Using PID ControllerDokument6 SeitenDevelopment of Active Suspension System For Automobiles Using PID ControllerJose Angel Puente PuenteNoch keine Bewertungen
- Pid Controller Design and TuningDokument33 SeitenPid Controller Design and TuningGesang Rakhmad UtomoNoch keine Bewertungen
- Session 6Dokument13 SeitenSession 6mohammedNoch keine Bewertungen
- Unit 8: Part 2: PD, PID, and Feedback Compensation: Engineering 5821: Control Systems IDokument32 SeitenUnit 8: Part 2: PD, PID, and Feedback Compensation: Engineering 5821: Control Systems INikhil PanikkarNoch keine Bewertungen
- Servo FundamentalsDokument11 SeitenServo Fundamentalsapi-3797895Noch keine Bewertungen
- CHR MethodDokument9 SeitenCHR Methodsanyo0612Noch keine Bewertungen
- Quotation 2000 Watt - CmpleteDokument1 SeiteQuotation 2000 Watt - CmpleteKhurram HashmiNoch keine Bewertungen
- Quotation 400 WattDokument1 SeiteQuotation 400 WattKhurram HashmiNoch keine Bewertungen
- Quotation 1000 Watt - CmpleteDokument1 SeiteQuotation 1000 Watt - CmpleteKhurram HashmiNoch keine Bewertungen
- Control Systems Engineering Lab Assignment Experiment-1: Submitted byDokument10 SeitenControl Systems Engineering Lab Assignment Experiment-1: Submitted byKhurram HashmiNoch keine Bewertungen
- CV Engr. Khurram Hashmi-AmendDokument2 SeitenCV Engr. Khurram Hashmi-AmendKhurram HashmiNoch keine Bewertungen
- Design, Instal, Solar Array - Progress 2Dokument29 SeitenDesign, Instal, Solar Array - Progress 2Khurram HashmiNoch keine Bewertungen
- Reactive Power ControlDokument21 SeitenReactive Power ControlKhurram Hashmi100% (2)
- Applictaions 8051Dokument17 SeitenApplictaions 8051Khurram HashmiNoch keine Bewertungen
- O Dearest of My FriendsDokument1 SeiteO Dearest of My FriendsKhurram HashmiNoch keine Bewertungen
- Bus Admittance Impedance. Matrix Algorithm. MatlabDokument4 SeitenBus Admittance Impedance. Matrix Algorithm. MatlabKhurram Hashmi100% (2)
- Standing in The Shadows byDokument1 SeiteStanding in The Shadows byKhurram HashmiNoch keine Bewertungen
- Who Am IDokument1 SeiteWho Am IKhurram HashmiNoch keine Bewertungen
- Convolution & Its Applications: University of Central PunjabDokument24 SeitenConvolution & Its Applications: University of Central PunjabKhurram HashmiNoch keine Bewertungen
- Love by KhurramDokument4 SeitenLove by KhurramKhurram HashmiNoch keine Bewertungen
- 4109 CPC For ExamDokument380 Seiten4109 CPC For ExamMMM-2012Noch keine Bewertungen
- DesalinationDokument4 SeitenDesalinationsivasu1980aNoch keine Bewertungen
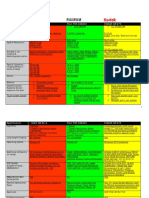
- Agfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Dokument3 SeitenAgfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Youness Ben TibariNoch keine Bewertungen
- Tanzania Finance Act 2008Dokument25 SeitenTanzania Finance Act 2008Andrey PavlovskiyNoch keine Bewertungen
- The Effectiveness of Risk Management: An Analysis of Project Risk Planning Across Industries and CountriesDokument13 SeitenThe Effectiveness of Risk Management: An Analysis of Project Risk Planning Across Industries and Countriesluisbmwm6Noch keine Bewertungen
- Health Insurance in Switzerland ETHDokument57 SeitenHealth Insurance in Switzerland ETHguzman87Noch keine Bewertungen
- Properties of Moist AirDokument11 SeitenProperties of Moist AirKarthik HarithNoch keine Bewertungen
- SEERS Medical ST3566 ManualDokument24 SeitenSEERS Medical ST3566 ManualAlexandra JanicNoch keine Bewertungen
- Cabling and Connection System PDFDokument16 SeitenCabling and Connection System PDFLyndryl ProvidoNoch keine Bewertungen
- T1500Z / T2500Z: Coated Cermet Grades With Brilliant Coat For Steel TurningDokument16 SeitenT1500Z / T2500Z: Coated Cermet Grades With Brilliant Coat For Steel TurninghosseinNoch keine Bewertungen
- Interruptions - 02.03.2023Dokument2 SeitenInterruptions - 02.03.2023Jeff JeffNoch keine Bewertungen
- Working Capital ManagementDokument39 SeitenWorking Capital ManagementRebelliousRascalNoch keine Bewertungen
- Basic of An Electrical Control PanelDokument16 SeitenBasic of An Electrical Control PanelJim Erol Bancoro100% (2)
- BluetoothDokument28 SeitenBluetoothMilind GoratelaNoch keine Bewertungen
- Ytrig Tuchchh TVDokument10 SeitenYtrig Tuchchh TVYogesh ChhaprooNoch keine Bewertungen
- Interoperability Standards For Voip Atm Components: Volume 4: RecordingDokument75 SeitenInteroperability Standards For Voip Atm Components: Volume 4: RecordingjuananpspNoch keine Bewertungen
- Week 8: ACCG3001 Organisational Planning and Control Tutorial In-Class Exercise - Student HandoutDokument3 SeitenWeek 8: ACCG3001 Organisational Planning and Control Tutorial In-Class Exercise - Student Handoutdwkwhdq dwdNoch keine Bewertungen
- 199437-Unit 4Dokument36 Seiten199437-Unit 4Yeswanth rajaNoch keine Bewertungen
- Delta AFC1212D-SP19Dokument9 SeitenDelta AFC1212D-SP19Brent SmithNoch keine Bewertungen
- A320 Basic Edition Flight TutorialDokument50 SeitenA320 Basic Edition Flight TutorialOrlando CuestaNoch keine Bewertungen
- Selvan CVDokument4 SeitenSelvan CVsuman_civilNoch keine Bewertungen
- Anaphylaxis Wallchart 2022Dokument1 SeiteAnaphylaxis Wallchart 2022Aymane El KandoussiNoch keine Bewertungen
- Difference Between Mountain Bike and BMXDokument3 SeitenDifference Between Mountain Bike and BMXShakirNoch keine Bewertungen
- Sample Annual BudgetDokument4 SeitenSample Annual BudgetMary Ann B. GabucanNoch keine Bewertungen
- Tinplate CompanyDokument32 SeitenTinplate CompanysnbtccaNoch keine Bewertungen
- Newsletter 289Dokument10 SeitenNewsletter 289Henry CitizenNoch keine Bewertungen
- How Yaffs WorksDokument25 SeitenHow Yaffs WorkseemkutayNoch keine Bewertungen
- Discover Mecosta 2011Dokument40 SeitenDiscover Mecosta 2011Pioneer GroupNoch keine Bewertungen
- ATPDraw 5 User Manual UpdatesDokument51 SeitenATPDraw 5 User Manual UpdatesdoniluzNoch keine Bewertungen
- Blade Torrent 110 FPV BNF Basic Sales TrainingDokument4 SeitenBlade Torrent 110 FPV BNF Basic Sales TrainingMarcio PisiNoch keine Bewertungen