Das könnte Ihnen auch gefallen
- Mauser 98K - Model 48 Rifle ManualDokument20 SeitenMauser 98K - Model 48 Rifle ManualMeor Amri96% (28)
- Piping Handbook - Hydrocarbon Processing - 1968Dokument140 SeitenPiping Handbook - Hydrocarbon Processing - 1968VS271294% (16)
- 500-600 Forklifts & Buckmaster: Parts CatalogDokument281 Seiten500-600 Forklifts & Buckmaster: Parts CatalogRoberto Mariano100% (2)
- Glass Inspection CriteriaDokument4 SeitenGlass Inspection CriteriabatteekhNoch keine Bewertungen
- Understanding Low Voltage Power Distribution SystemsDokument64 SeitenUnderstanding Low Voltage Power Distribution SystemsJorge Luis Mallqui Barbaran100% (1)
- Coastal DefenceDokument112 SeitenCoastal DefenceMorvin BudhanNoch keine Bewertungen
- Exam Flashcards: by Jonathan DonadoDokument520 SeitenExam Flashcards: by Jonathan Donadosolarstuff100% (1)
- Paper-2 Clustering Algorithms in Data Mining A ReviewDokument7 SeitenPaper-2 Clustering Algorithms in Data Mining A ReviewRachel WheelerNoch keine Bewertungen
- Designing A Neural Network For Forecasting Financial and Economic Time SerieDokument22 SeitenDesigning A Neural Network For Forecasting Financial and Economic Time SerieFaisal KhalilNoch keine Bewertungen
- Fuzzy Logic and Expert Systems ApplicationsVon EverandFuzzy Logic and Expert Systems ApplicationsBewertung: 5 von 5 Sternen5/5 (1)
- Wiring Color and Pin-Out Schematic Electronic Vessel Control EVC - C, D4/D6-DPH/DPRDokument2 SeitenWiring Color and Pin-Out Schematic Electronic Vessel Control EVC - C, D4/D6-DPH/DPRSivan Raj50% (2)
- Water Treatment Process Disinfection PDFDokument6 SeitenWater Treatment Process Disinfection PDFAriff JasniNoch keine Bewertungen
- Engine Maintenance PartsDokument13 SeitenEngine Maintenance PartsSerkanAl100% (1)
- Group Method of Data Handling: Fundamentals and Applications for Predictive Modeling and Data AnalysisVon EverandGroup Method of Data Handling: Fundamentals and Applications for Predictive Modeling and Data AnalysisNoch keine Bewertungen
- CISIM2010 HBHashemiDokument5 SeitenCISIM2010 HBHashemiHusain SulemaniNoch keine Bewertungen
- Semi Active PDFDokument8 SeitenSemi Active PDFAl C JrNoch keine Bewertungen
- A Neural Network Based System For Intrusion Detection and Classification of AttacksDokument6 SeitenA Neural Network Based System For Intrusion Detection and Classification of AttacksbharadwajrohanNoch keine Bewertungen
- Classification of Heart Disease Dataset Using Multilayer Feed Forward Backpropogation AlgorithmDokument7 SeitenClassification of Heart Disease Dataset Using Multilayer Feed Forward Backpropogation AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Information-Decomposition-Model-Based Missing Value EstimationDokument11 SeitenInformation-Decomposition-Model-Based Missing Value EstimationJuan Francisco Durango GrisalesNoch keine Bewertungen
- Causal Model Based On ANNDokument6 SeitenCausal Model Based On ANNdeesingNoch keine Bewertungen
- Multi-Layer PerceptronsDokument8 SeitenMulti-Layer PerceptronswarrengauciNoch keine Bewertungen
- I-:'-Ntrumsu'!I: Model Selection in Neural NetworksDokument27 SeitenI-:'-Ntrumsu'!I: Model Selection in Neural Networksniwdex12Noch keine Bewertungen
- Development and Implementation of Artificial Neural Networks For Intrusion Detection in Computer NetworkDokument5 SeitenDevelopment and Implementation of Artificial Neural Networks For Intrusion Detection in Computer Networks.pawar.19914262Noch keine Bewertungen
- The Use of Genetic Algorithms Neural Networks Missing Data in DatabaseDokument6 SeitenThe Use of Genetic Algorithms Neural Networks Missing Data in DatabasePochi PoNoch keine Bewertungen
- MINOR PROJECT DetailsDokument6 SeitenMINOR PROJECT DetailsTOB3Y 09Noch keine Bewertungen
- 9 Multi PattDokument10 Seiten9 Multi PattqureshirazaNoch keine Bewertungen
- Analysis of Error-Based Machine Learning Algorithms in Network Anomaly Detection and CategorizationDokument13 SeitenAnalysis of Error-Based Machine Learning Algorithms in Network Anomaly Detection and CategorizationConfidence UdeNoch keine Bewertungen
- A Novel Evaluation Approach ToDokument13 SeitenA Novel Evaluation Approach ToAIRCC - IJNSANoch keine Bewertungen
- Pattern Recognition System Using MLP Neural Networks: Sarvda Chauhan, Shalini DhingraDokument4 SeitenPattern Recognition System Using MLP Neural Networks: Sarvda Chauhan, Shalini DhingraIJERDNoch keine Bewertungen
- Applications of Neural Networks in Data Mining: M.Charles ArockiarajDokument4 SeitenApplications of Neural Networks in Data Mining: M.Charles ArockiarajresearchinventyNoch keine Bewertungen
- Fuzzy Based Techniques For Handling Missing ValuesDokument6 SeitenFuzzy Based Techniques For Handling Missing ValuesFarid Ali MousaNoch keine Bewertungen
- Machine Learning Algorithms For Spotting 6G Network Penetration For Different AttacksDokument5 SeitenMachine Learning Algorithms For Spotting 6G Network Penetration For Different AttacksNabonita HalderNoch keine Bewertungen
- Taming The Chaos in Neural Network Time Series PreDokument37 SeitenTaming The Chaos in Neural Network Time Series PreAnon BayNoch keine Bewertungen
- IEEE Conference TemplaDokument4 SeitenIEEE Conference TemplaAshlesha ShettyNoch keine Bewertungen
- IEEE Conference TemplateDokument4 SeitenIEEE Conference TemplateAshlesha ShettyNoch keine Bewertungen
- Comparison of Predictive Algorithms: Backpropagation, SVM, LSTM and Kalman Filter For Stock MarketDokument7 SeitenComparison of Predictive Algorithms: Backpropagation, SVM, LSTM and Kalman Filter For Stock MarketPiyushPurohitNoch keine Bewertungen
- Feature Selection Based On Fuzzy EntropyDokument5 SeitenFeature Selection Based On Fuzzy EntropyInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Application of Neural Networks in TelecomDokument4 SeitenApplication of Neural Networks in TelecomKara ButlerNoch keine Bewertungen
- Machine Learning Project 1Dokument19 SeitenMachine Learning Project 1Durga Prasad Reddy ChilukuriNoch keine Bewertungen
- Psichogios AICHE-1 PDFDokument13 SeitenPsichogios AICHE-1 PDFRuppahNoch keine Bewertungen
- 10 Myths About Neutral NetworksDokument10 Seiten10 Myths About Neutral NetworksNialish KhanNoch keine Bewertungen
- Article ANN EstimationDokument7 SeitenArticle ANN EstimationMiljan KovacevicNoch keine Bewertungen
- Symmetry: Unsupervised Anomaly Detection Approach For Time-Series in Multi-Domains Using Deep Reconstruction ErrorDokument22 SeitenSymmetry: Unsupervised Anomaly Detection Approach For Time-Series in Multi-Domains Using Deep Reconstruction ErrorSakshi ChoudharyNoch keine Bewertungen
- Resolving Gene Expression Data Using Multiobjective Optimization ApproachDokument7 SeitenResolving Gene Expression Data Using Multiobjective Optimization ApproachIJIRSTNoch keine Bewertungen
- A Hybrid Neural Network-First Principles Approach Process ModelingDokument13 SeitenA Hybrid Neural Network-First Principles Approach Process ModelingJuan Carlos Ladino VegaNoch keine Bewertungen
- Analysis of Heart Diseases Dataset Using Neural Network ApproachDokument8 SeitenAnalysis of Heart Diseases Dataset Using Neural Network ApproachLewis TorresNoch keine Bewertungen
- A Fault Detection Approach Based On Machine Learning Models: (Legarza, RMM, Rramirez) @itesm - MXDokument2 SeitenA Fault Detection Approach Based On Machine Learning Models: (Legarza, RMM, Rramirez) @itesm - MXsachinNoch keine Bewertungen
- Data Clustering Using Kernel BasedDokument6 SeitenData Clustering Using Kernel BasedijitcajournalNoch keine Bewertungen
- A Robust Missing Value Imputation Method Mifoimpute For Incomplete Molecular Descriptor Data and Comparative Analysis With Other Missing Value Imputation MethodsDokument12 SeitenA Robust Missing Value Imputation Method Mifoimpute For Incomplete Molecular Descriptor Data and Comparative Analysis With Other Missing Value Imputation MethodsAnonymous lVQ83F8mCNoch keine Bewertungen
- Comparing Multiple Imputation and Machine Learning Techniques For Longitudinal DataDokument13 SeitenComparing Multiple Imputation and Machine Learning Techniques For Longitudinal DataInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Bcia Cia2Dokument14 SeitenBcia Cia2crickethub428Noch keine Bewertungen
- Quality Prediction in Object Oriented System by Using ANN: A Brief SurveyDokument6 SeitenQuality Prediction in Object Oriented System by Using ANN: A Brief Surveyeditor_ijarcsseNoch keine Bewertungen
- Enhancing Time Series Anomaly Detection: A Hybrid Model Fusion ApproachDokument13 SeitenEnhancing Time Series Anomaly Detection: A Hybrid Model Fusion Approachijcijournal1821Noch keine Bewertungen
- 3413ijcsa05 PDFDokument13 Seiten3413ijcsa05 PDFVanathi AndiranNoch keine Bewertungen
- Applied Sciences: An Optimized Brain-Based Algorithm For Classifying Parkinson's DiseaseDokument16 SeitenApplied Sciences: An Optimized Brain-Based Algorithm For Classifying Parkinson's Diseaseultimatekp144Noch keine Bewertungen
- Rule Extraction Using Artificial Neural Networks: S. M. Kamruzzaman Ahmed Ryadh HasanDokument14 SeitenRule Extraction Using Artificial Neural Networks: S. M. Kamruzzaman Ahmed Ryadh Hasanzayyanu yunusaNoch keine Bewertungen
- Ahmad Taher Azar - 5 Adaptive - Neuro-Fuzzy - SystemsDokument26 SeitenAhmad Taher Azar - 5 Adaptive - Neuro-Fuzzy - SystemsRodrigo ContrerasNoch keine Bewertungen
- Improved Data Discrimination in Wireless Sensor Networks: B. A. Sabarish, S. ShanmugapriyaDokument3 SeitenImproved Data Discrimination in Wireless Sensor Networks: B. A. Sabarish, S. Shanmugapriyamurthy_siri22Noch keine Bewertungen
- Forex - Nnet Vs RegDokument6 SeitenForex - Nnet Vs RegAnshik BansalNoch keine Bewertungen
- CSCI 4525 Project IVDokument139 SeitenCSCI 4525 Project IVPRABHUDEV G ENoch keine Bewertungen
- Data Sheet Das579543Dokument29 SeitenData Sheet Das579543EVER RIVERANoch keine Bewertungen
- 1 NN in Cap Mkts Refenes Ch01 IntroDokument7 Seiten1 NN in Cap Mkts Refenes Ch01 Introporapooka123Noch keine Bewertungen
- Intrusion Detection Using An Improved Competitive Learning Lamstar Neural NetworkDokument9 SeitenIntrusion Detection Using An Improved Competitive Learning Lamstar Neural NetworkSwapnil MeteNoch keine Bewertungen
- Anomaly Detection Using Machine LearningDokument10 SeitenAnomaly Detection Using Machine Learningvishal jainNoch keine Bewertungen
- Analysis of Time Series Rule Extraction Techniques: Hima Suresh, Dr. Kumudha RaimondDokument6 SeitenAnalysis of Time Series Rule Extraction Techniques: Hima Suresh, Dr. Kumudha RaimondInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Ies 2019Dokument6 SeitenIes 2019Nur SakinahNoch keine Bewertungen
- Data Mining Based On Neural Networks: Fore Word: What Is A Neural Network?Dokument21 SeitenData Mining Based On Neural Networks: Fore Word: What Is A Neural Network?sudheer0553Noch keine Bewertungen
- Intrusion Detection System Based On Multi-Layer Perceptron Neural Networks and Decision TreeDokument5 SeitenIntrusion Detection System Based On Multi-Layer Perceptron Neural Networks and Decision Treedinesh nNoch keine Bewertungen
- Feedforward Neural Networks: Fundamentals and Applications for The Architecture of Thinking Machines and Neural WebsVon EverandFeedforward Neural Networks: Fundamentals and Applications for The Architecture of Thinking Machines and Neural WebsNoch keine Bewertungen
- Python Machine Learning for Beginners: Unsupervised Learning, Clustering, and Dimensionality Reduction. Part 1Von EverandPython Machine Learning for Beginners: Unsupervised Learning, Clustering, and Dimensionality Reduction. Part 1Noch keine Bewertungen
- SemDokument31 SeitenSemkaushik4208Noch keine Bewertungen
- DT NotesDokument117 SeitenDT NotestessNoch keine Bewertungen
- Biomasse-HKW Sandreuth E NQDokument8 SeitenBiomasse-HKW Sandreuth E NQValeriu StanNoch keine Bewertungen
- Doing Hot Work On Gas ShipDokument5 SeitenDoing Hot Work On Gas ShipAnonymous icnhaNsFNoch keine Bewertungen
- KST GlueTech 44 enDokument80 SeitenKST GlueTech 44 enLeandro RadamesNoch keine Bewertungen
- Diesel Generator Set QSL9 Series Engine: Power GenerationDokument4 SeitenDiesel Generator Set QSL9 Series Engine: Power Generationsdasd100% (1)
- Lesson Plan 2 Road FurnitureDokument4 SeitenLesson Plan 2 Road FurnitureShahbaz SharifNoch keine Bewertungen
- David Lowe Thesis PDFDokument201 SeitenDavid Lowe Thesis PDFKRISHNA VAMSHINoch keine Bewertungen
- ITP InstrumentationDokument9 SeitenITP InstrumentationzhangyiliNoch keine Bewertungen
- Circuiting Explained-Water Coils PDFDokument2 SeitenCircuiting Explained-Water Coils PDFFrancisNoch keine Bewertungen
- Restoration and Adaptive Re-Use of Queen Mary's High School: Phase-1Dokument4 SeitenRestoration and Adaptive Re-Use of Queen Mary's High School: Phase-1Sonali GurungNoch keine Bewertungen
- Korantin PPDokument4 SeitenKorantin PPteddy garfieldNoch keine Bewertungen
- Woson 23 Litre B Class Touch AutoclaveDokument2 SeitenWoson 23 Litre B Class Touch AutoclaveBashar MohammadNoch keine Bewertungen
- PIONEER AUTORADIO Deh-X4850bt Deh-X6850bt Operating Manual Ing - Esp - PorDokument72 SeitenPIONEER AUTORADIO Deh-X4850bt Deh-X6850bt Operating Manual Ing - Esp - PorJesus NinalayaNoch keine Bewertungen
- Waqas Riaz: Total Years of Experience: 2 Years ObjectiveDokument2 SeitenWaqas Riaz: Total Years of Experience: 2 Years ObjectiveIrfanNoch keine Bewertungen
- Trade List 13 Mar 2019Dokument74 SeitenTrade List 13 Mar 2019Bharat JainNoch keine Bewertungen
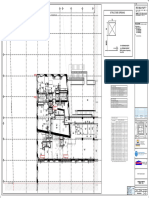
- 20105-AR-HOT-07-105-01 Rev 00Dokument1 Seite20105-AR-HOT-07-105-01 Rev 00Bahaa MohamedNoch keine Bewertungen
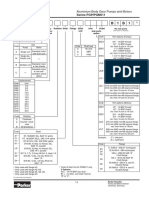
- PG 511 B 1 B 1: Ordering Code Series PGP/PGM511Dokument7 SeitenPG 511 B 1 B 1: Ordering Code Series PGP/PGM511Four SticksNoch keine Bewertungen
- PORTFOLIO: OFFICE WORK (20/06/2022-20/12/2022) Harleen KlairDokument34 SeitenPORTFOLIO: OFFICE WORK (20/06/2022-20/12/2022) Harleen KlairHarleen KlairNoch keine Bewertungen