Das könnte Ihnen auch gefallen
- Arduino Based Motor Driver: Nuudel@must - Edu.mnDokument25 SeitenArduino Based Motor Driver: Nuudel@must - Edu.mnMyagmarjav NuudelNoch keine Bewertungen
- CodeDokument5 SeitenCodeAbaidullah SajidNoch keine Bewertungen
- CodeDokument2 SeitenCodeJhanavi ReddyNoch keine Bewertungen
- Arduino Robot Arm TFCDDokument10 SeitenArduino Robot Arm TFCDNelson MendivelsoNoch keine Bewertungen
- Line Follower and Obstacle Avoiding Robot - InoDokument4 SeitenLine Follower and Obstacle Avoiding Robot - Inoakuladamodhar20Noch keine Bewertungen
- SpeedControl InoDokument3 SeitenSpeedControl InoOuail MakhebiNoch keine Bewertungen
- 8 Bit Hex To Decimal ConversionDokument20 Seiten8 Bit Hex To Decimal ConversionManoj Kavedia100% (1)
- Uoitc: NRF24L01Dokument6 SeitenUoitc: NRF24L01Zahraa AyadNoch keine Bewertungen
- Project Description: 1.1. Arduino CodeDokument6 SeitenProject Description: 1.1. Arduino CodesandraNoch keine Bewertungen
- โค้ดหุ่นยนต์จ้าวความเร็วโค้ดตัวอย่างDokument4 Seitenโค้ดหุ่นยนต์จ้าวความเร็วโค้ดตัวอย่างธวัชชัย ตรีศูนย์Noch keine Bewertungen
- Embedded Software Os Solar Tracker Test BenchDokument3 SeitenEmbedded Software Os Solar Tracker Test BenchRodrigo Ortolá InocentiNoch keine Bewertungen
- Codigo de Programacion de Pid en ArduinoDokument4 SeitenCodigo de Programacion de Pid en ArduinoJhan JesyNoch keine Bewertungen
- Enhanced Dual Axis ProgramDokument12 SeitenEnhanced Dual Axis ProgramLENKAI—254Noch keine Bewertungen
- Required Item-: Solar Tracking System Using ArduinoDokument3 SeitenRequired Item-: Solar Tracking System Using ArduinoFabio NovaesNoch keine Bewertungen
- Script Arduino Motor BrushlessDokument6 SeitenScript Arduino Motor BrushlessebrielNoch keine Bewertungen
- LED Buzzer: R6 470 LS1 R7 100Dokument10 SeitenLED Buzzer: R6 470 LS1 R7 100pratheep01Noch keine Bewertungen
- ความเร็วทดลองDokument4 Seitenความเร็วทดลองธวัชชัย ตรีศูนย์Noch keine Bewertungen
- Instructable Arduino Solar Tracker SketchDokument3 SeitenInstructable Arduino Solar Tracker SketchEmmanuel SamuelNoch keine Bewertungen
- AS Meped Spider Robot - 3Dokument12 SeitenAS Meped Spider Robot - 3Aqeel AhmedNoch keine Bewertungen
- Hardware Interrupts - ArduinoDokument7 SeitenHardware Interrupts - Arduino17maq307Noch keine Bewertungen
- ADC LCD.CDokument5 SeitenADC LCD.CKavindran Ganesan100% (1)
- 2 ServoDokument2 Seiten2 ServoNardy Hepy100% (1)
- Joystick Controlled Robot Arm Using An ArduinoDokument5 SeitenJoystick Controlled Robot Arm Using An ArduinoMuhd Muhd HasifNoch keine Bewertungen
- Arduinos DianaDokument8 SeitenArduinos DianaJulio DanielNoch keine Bewertungen
- MC Practicals 2Dokument12 SeitenMC Practicals 2Adi AdnanNoch keine Bewertungen
- Control NEMA Amb JoystickDokument3 SeitenControl NEMA Amb JoystickSérgio PortuNoch keine Bewertungen
- HC 12 Radio - EPPLDokument12 SeitenHC 12 Radio - EPPLSeth Madhusudan RathiNoch keine Bewertungen
- 046 - Tugas 2 Achmad FikriDokument2 Seiten046 - Tugas 2 Achmad FikrimvrsmbhjhpNoch keine Bewertungen
- ParkDokument3 SeitenParkpatelansh9484Noch keine Bewertungen
- Basis CodesDokument15 SeitenBasis CodesJholo LopezNoch keine Bewertungen
- Arduino Code Dual AxisDokument2 SeitenArduino Code Dual AxissunilkumareceNoch keine Bewertungen
- Arduino Control Car V2 byDokument4 SeitenArduino Control Car V2 byMikaela E Ramírez HerreraNoch keine Bewertungen
- ทดสอบDokument5 Seitenทดสอบธวัชชัย ตรีศูนย์Noch keine Bewertungen
- DocumentDokument5 SeitenDocumentFunTech BloggerNoch keine Bewertungen
- Codigo Aranha Da WebDokument13 SeitenCodigo Aranha Da WebLuis CarlosNoch keine Bewertungen
- Binary 1's and 0's CounterDokument13 SeitenBinary 1's and 0's CounterKetan SalviNoch keine Bewertungen
- Microcontrolleurs: Marin IulianaDokument11 SeitenMicrocontrolleurs: Marin IulianaCoop ZkuberveitNoch keine Bewertungen
- Manual Adjust For RTC Clock With Arduino and 7-Segment LEDDokument21 SeitenManual Adjust For RTC Clock With Arduino and 7-Segment LEDfrasekh100% (1)
- Arduino CodeDokument1 SeiteArduino CodeNaeem UllahNoch keine Bewertungen
- Hexapod Master Slave CommunicationDokument22 SeitenHexapod Master Slave CommunicationDigvijay MaheshwariNoch keine Bewertungen
- Lesson Nr.17-WPS OfficeDokument4 SeitenLesson Nr.17-WPS OfficeFika StephaneNoch keine Bewertungen
- Lab06 - Smart Home Automation Using SensorsDokument14 SeitenLab06 - Smart Home Automation Using SensorsChâu Trần100% (1)
- NoteDokument1 SeiteNotesyahmiaminin99Noch keine Bewertungen
- #IncludeDokument4 Seiten#IncludeTri Edi Kusuma KurniawanNoch keine Bewertungen
- Annexe: Programme Du MicrocontrôleurDokument3 SeitenAnnexe: Programme Du MicrocontrôleurSoufianeBattalNoch keine Bewertungen
- Set 3 Embedded Programs Write An Embedded C Program To Control The DC Motor Using 4 Switches Connected in H Bridge FormatDokument20 SeitenSet 3 Embedded Programs Write An Embedded C Program To Control The DC Motor Using 4 Switches Connected in H Bridge FormatVinay KelurNoch keine Bewertungen
- Detalhes Placa Nano V3Dokument12 SeitenDetalhes Placa Nano V3Luis CarlosNoch keine Bewertungen
- 4 Led Control CodeDokument2 Seiten4 Led Control Codeshauryakakkar19Noch keine Bewertungen
- Code ArduinoDokument13 SeitenCode ArduinoChaimae FlissiNoch keine Bewertungen
- Notes Arduino NanoDokument10 SeitenNotes Arduino NanoManfredHNoch keine Bewertungen
- ZadatciDokument22 SeitenZadatciTakticar100% (1)
- Tugas Mikrokontroler Dan Mikroprosesor Bobi Ardiansyah 145060301111055Dokument7 SeitenTugas Mikrokontroler Dan Mikroprosesor Bobi Ardiansyah 145060301111055Rosihan Arby HarahapNoch keine Bewertungen
- Program Uj ArduinoDokument6 SeitenProgram Uj ArduinoCLARESTA VALLENCIA SILVERANoch keine Bewertungen
- DTW-2-Arduino Lab - ManualDokument13 SeitenDTW-2-Arduino Lab - ManualTALAPANENI SASANKNoch keine Bewertungen
- Laboratorul 2Dokument3 SeitenLaboratorul 2Forgo tenNoch keine Bewertungen
- LCD ProjectDokument3 SeitenLCD ProjectMalavika R NairNoch keine Bewertungen
- Controlling Motor With PotentiometerDokument7 SeitenControlling Motor With PotentiometerPatricia KCNoch keine Bewertungen
- USBto RS232 AsmDokument34 SeitenUSBto RS232 AsmBoBaHNoch keine Bewertungen
- Projects With Microcontrollers And PICCVon EverandProjects With Microcontrollers And PICCBewertung: 5 von 5 Sternen5/5 (1)
- Resume: Mr. Shubham Mohan Deokar E-MailDokument2 SeitenResume: Mr. Shubham Mohan Deokar E-MailAdv Ranjit Shedge PatilNoch keine Bewertungen
- Close Enough To Touch by Victoria Dahl - Chapter SamplerDokument23 SeitenClose Enough To Touch by Victoria Dahl - Chapter SamplerHarlequinAustraliaNoch keine Bewertungen
- Configuring BGP On Cisco Routers Lab Guide 3.2Dokument106 SeitenConfiguring BGP On Cisco Routers Lab Guide 3.2skuzurov67% (3)
- SOL LogicDokument21 SeitenSOL LogicJa RiveraNoch keine Bewertungen
- The Covenant Taken From The Sons of Adam Is The FitrahDokument10 SeitenThe Covenant Taken From The Sons of Adam Is The FitrahTyler FranklinNoch keine Bewertungen
- Contents EEMUA Publication 190 Edition1 May 2015Dokument4 SeitenContents EEMUA Publication 190 Edition1 May 2015Aditya JainNoch keine Bewertungen
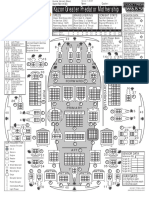
- Kazon Greater Predator MothershipDokument1 SeiteKazon Greater Predator MothershipknavealphaNoch keine Bewertungen
- Friction: Ultiple Hoice UestionsDokument5 SeitenFriction: Ultiple Hoice Uestionspk2varmaNoch keine Bewertungen
- Measurement Assignment EssayDokument31 SeitenMeasurement Assignment EssayBihanChathuranga100% (2)
- Review On AlgebraDokument29 SeitenReview On AlgebraGraziela GutierrezNoch keine Bewertungen
- Quarter 1-Week 2 - Day 2.revisedDokument4 SeitenQuarter 1-Week 2 - Day 2.revisedJigz FamulaganNoch keine Bewertungen
- SachinDokument3 SeitenSachinMahendraNoch keine Bewertungen
- Cable To Metal Surface, Cathodic - CAHAAW3Dokument2 SeitenCable To Metal Surface, Cathodic - CAHAAW3lhanx2Noch keine Bewertungen
- PSA Poster Project WorkbookDokument38 SeitenPSA Poster Project WorkbookwalliamaNoch keine Bewertungen
- Guyana and The Islamic WorldDokument21 SeitenGuyana and The Islamic WorldshuaibahmadkhanNoch keine Bewertungen
- Micro Lab Midterm Study GuideDokument15 SeitenMicro Lab Midterm Study GuideYvette Salomé NievesNoch keine Bewertungen
- Determination Rules SAP SDDokument2 SeitenDetermination Rules SAP SDkssumanthNoch keine Bewertungen
- SASS Prelims 2017 4E5N ADokument9 SeitenSASS Prelims 2017 4E5N ADamien SeowNoch keine Bewertungen
- Perancangan Crushing Plant Batu Andesit Di PT Nurmuda Cahaya Desa Batujajar Timur Kecamatan Batujajar Kabupaten Bandung Barat Provinsi Jawa BaratDokument8 SeitenPerancangan Crushing Plant Batu Andesit Di PT Nurmuda Cahaya Desa Batujajar Timur Kecamatan Batujajar Kabupaten Bandung Barat Provinsi Jawa BaratSutan AdityaNoch keine Bewertungen
- Aluminum PorterDokument2 SeitenAluminum PorterAmir ShameemNoch keine Bewertungen
- DBMS Lab ManualDokument57 SeitenDBMS Lab ManualNarendh SubramanianNoch keine Bewertungen
- Man As God Created Him, ThemDokument3 SeitenMan As God Created Him, ThemBOEN YATORNoch keine Bewertungen
- Delonghi Esam Series Service Info ItalyDokument10 SeitenDelonghi Esam Series Service Info ItalyBrko BrkoskiNoch keine Bewertungen
- Sveba Dahlen - SRP240Dokument16 SeitenSveba Dahlen - SRP240Paola MendozaNoch keine Bewertungen
- Julia Dito ResumeDokument3 SeitenJulia Dito Resumeapi-253713289Noch keine Bewertungen
- An Evaluation of MGNREGA in SikkimDokument7 SeitenAn Evaluation of MGNREGA in SikkimBittu SubbaNoch keine Bewertungen
- 1 - 2020-CAP Surveys CatalogDokument356 Seiten1 - 2020-CAP Surveys CatalogCristiane AokiNoch keine Bewertungen
- Rajiv Gandhi University of Health Sciences, Bengaluru, KarnatakaDokument9 SeitenRajiv Gandhi University of Health Sciences, Bengaluru, KarnatakaNavin ChandarNoch keine Bewertungen
- Inside:: Issue 4 - February 2004 Bi-Monthly Warhammer E-ZineDokument40 SeitenInside:: Issue 4 - February 2004 Bi-Monthly Warhammer E-ZineJoe BloggsNoch keine Bewertungen
- Heimbach - Keeping Formingfabrics CleanDokument4 SeitenHeimbach - Keeping Formingfabrics CleanTunç TürkNoch keine Bewertungen