Das könnte Ihnen auch gefallen
- Total Force Fitness II - The DomainsDokument83 SeitenTotal Force Fitness II - The DomainsLaboratory in the WildNoch keine Bewertungen
- Franz and Kram (2011) Grade and Muscle ActivationDokument5 SeitenFranz and Kram (2011) Grade and Muscle ActivationLaboratory in the WildNoch keine Bewertungen
- Teleoperation in BuildingsDokument7 SeitenTeleoperation in BuildingsLaboratory in the WildNoch keine Bewertungen
- Minetti Et Al. (1993) Optimal GradientDokument12 SeitenMinetti Et Al. (1993) Optimal GradientLaboratory in the WildNoch keine Bewertungen
- Neural Basis of Navigation in Urban TerrainDokument4 SeitenNeural Basis of Navigation in Urban TerrainLaboratory in the WildNoch keine Bewertungen
- Silverman (2012) Incline and Decline WalkingDokument7 SeitenSilverman (2012) Incline and Decline WalkingLaboratory in the WildNoch keine Bewertungen
- Football TacklingDokument8 SeitenFootball TacklingLaboratory in the WildNoch keine Bewertungen
- Cooper Harper (1969)Dokument56 SeitenCooper Harper (1969)Laboratory in the Wild100% (1)
- Cavanagh (1980) Ground Reaction Forces in Distance RunningDokument10 SeitenCavanagh (1980) Ground Reaction Forces in Distance RunningLaboratory in the WildNoch keine Bewertungen
- Movement Models From SportsDokument23 SeitenMovement Models From SportsLaboratory in the WildNoch keine Bewertungen
- Dynamic Visual Acuity Over Head MovementsDokument13 SeitenDynamic Visual Acuity Over Head MovementsLaboratory in the WildNoch keine Bewertungen
- Rheology and Comparative BiomechanicsDokument11 SeitenRheology and Comparative BiomechanicsLaboratory in the WildNoch keine Bewertungen
- Handling Qualities For Vehicle DynamicsDokument180 SeitenHandling Qualities For Vehicle DynamicsLaboratory in the WildNoch keine Bewertungen
- Interpersonal Dynamics in SportDokument9 SeitenInterpersonal Dynamics in SportLaboratory in the WildNoch keine Bewertungen
- Elastic Variability in RunningDokument8 SeitenElastic Variability in RunningLaboratory in the WildNoch keine Bewertungen
- Target and Disturbances in Flight SimulationDokument92 SeitenTarget and Disturbances in Flight SimulationLaboratory in the WildNoch keine Bewertungen
- Behavioral Dynamics of InterceptingDokument17 SeitenBehavioral Dynamics of InterceptingLaboratory in the WildNoch keine Bewertungen
- Coordination of Upper Torso and ArmsDokument13 SeitenCoordination of Upper Torso and ArmsLaboratory in the WildNoch keine Bewertungen
- Internal and External WorkDokument15 SeitenInternal and External WorkLaboratory in the WildNoch keine Bewertungen
- Intermodal Regulation of HeadingDokument3 SeitenIntermodal Regulation of HeadingLaboratory in the WildNoch keine Bewertungen
- High Speed Running and Eccentric LoadingDokument17 SeitenHigh Speed Running and Eccentric LoadingLaboratory in the WildNoch keine Bewertungen
- Running Compliance Over Rough TerrainDokument5 SeitenRunning Compliance Over Rough TerrainLaboratory in the WildNoch keine Bewertungen
- Coordination Variability Around The Walk To Run Transition During Human LocomotionDokument19 SeitenCoordination Variability Around The Walk To Run Transition During Human LocomotionLaboratory in the WildNoch keine Bewertungen
- Optimal Control Model of Human OperatorDokument15 SeitenOptimal Control Model of Human OperatorLaboratory in the WildNoch keine Bewertungen
- Vestibular Dysfunction and Dynamic Visual Acuity During Treadmill LocomotionDokument9 SeitenVestibular Dysfunction and Dynamic Visual Acuity During Treadmill LocomotionLaboratory in the WildNoch keine Bewertungen
- Dynamic Visual Acuity During Treadmill LocomotionDokument9 SeitenDynamic Visual Acuity During Treadmill LocomotionLaboratory in the WildNoch keine Bewertungen
- Affordances For DecelerationDokument22 SeitenAffordances For DecelerationLaboratory in the WildNoch keine Bewertungen
- Elastic Transition Walk-RunDokument8 SeitenElastic Transition Walk-RunLaboratory in the WildNoch keine Bewertungen
- 1980 Lee Optic Flow FieldDokument11 Seiten1980 Lee Optic Flow FieldLaboratory in the WildNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Human Anatomy 4th Edition McKinley Test Bank 1Dokument35 SeitenHuman Anatomy 4th Edition McKinley Test Bank 1donnawugnwsjrzcxt100% (27)
- Prosthodontics Lec 4 PDFDokument11 SeitenProsthodontics Lec 4 PDFHassan QazaniNoch keine Bewertungen
- 8 Benefits of Warming UpDokument2 Seiten8 Benefits of Warming UpJevyn KhoNoch keine Bewertungen
- 70037Dokument4 Seiten70037Nabila SaribanunNoch keine Bewertungen
- BiophysicsDokument27 SeitenBiophysicsSarah HanNoch keine Bewertungen
- Epistaxis and TumorDokument20 SeitenEpistaxis and TumorTri Ayu WdNoch keine Bewertungen
- Fisa Cls A 5 ADokument3 SeitenFisa Cls A 5 Ajanebennet3000Noch keine Bewertungen
- Bandha Yoga. Tips and TechniquesDokument26 SeitenBandha Yoga. Tips and TechniquesTatjana Good100% (6)
- January 2021 MS - Unit 2 Edexcel Biology A-LevelDokument31 SeitenJanuary 2021 MS - Unit 2 Edexcel Biology A-LevelZahra SultanNoch keine Bewertungen
- Pop Gen Practice Problems SP 14Dokument4 SeitenPop Gen Practice Problems SP 14Pia ViloriaNoch keine Bewertungen
- Zoology II (Em) BLM 21-22Dokument99 SeitenZoology II (Em) BLM 21-22GANESH KANDAGATLANoch keine Bewertungen
- Nilai Normal Lab PEBDokument1 SeiteNilai Normal Lab PEBRisma KurniasihNoch keine Bewertungen
- Small IntestineDokument28 SeitenSmall IntestineHusnainAhmedNoch keine Bewertungen
- Theories of Impression Making in Complete Denture TreatmentDokument19 SeitenTheories of Impression Making in Complete Denture Treatmentdrgayen6042100% (1)
- SCIENCE 9-Lesson 1 PhotosynthesisDokument2 SeitenSCIENCE 9-Lesson 1 PhotosynthesisTeacher anaNoch keine Bewertungen
- The Workings of The Brain Powers of The MindDokument17 SeitenThe Workings of The Brain Powers of The MindLovely ramirezNoch keine Bewertungen
- Data Alkes 2020 TerbaruDokument23 SeitenData Alkes 2020 TerbaruRoyliNoch keine Bewertungen
- Acute Miocard InfarkDokument32 SeitenAcute Miocard InfarkhansNoch keine Bewertungen
- METAMORPHOSISDokument27 SeitenMETAMORPHOSISPhoebe O. TumammanNoch keine Bewertungen
- Chapter 6 NeoplasiaDokument24 SeitenChapter 6 Neoplasiahenna patelNoch keine Bewertungen
- Presentation For Gender and Society 2Dokument24 SeitenPresentation For Gender and Society 2Fhebelyn TaborNoch keine Bewertungen
- Drosophila Melanogaster Models of Motor Neuron Disease 2013 (Edited by Ruben Cauchi)Dokument239 SeitenDrosophila Melanogaster Models of Motor Neuron Disease 2013 (Edited by Ruben Cauchi)Dr.Gill_Grissom100% (1)
- Steps HemodialysisDokument3 SeitenSteps HemodialysisCes LoNoch keine Bewertungen
- Prinsip Penyusunan Gigi Artifisial Kelompok 7Dokument53 SeitenPrinsip Penyusunan Gigi Artifisial Kelompok 7gilangNoch keine Bewertungen
- PeriodisationDokument6 SeitenPeriodisationZahra SativaniNoch keine Bewertungen
- Desolation - RL CaulderDokument308 SeitenDesolation - RL CaulderInes LagarrigueNoch keine Bewertungen
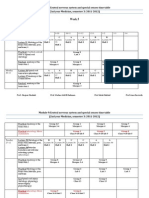
- Week 5: Module 9:central Nervous System and Special Senses Time Table (2nd Year Medicine, Semester 3: 2011-2012)Dokument17 SeitenWeek 5: Module 9:central Nervous System and Special Senses Time Table (2nd Year Medicine, Semester 3: 2011-2012)Hairul AnuarNoch keine Bewertungen
- Neonatal PneumoniaDokument2 SeitenNeonatal PneumoniaJustin EduardoNoch keine Bewertungen
- Impression Materials For Partial DentureDokument40 SeitenImpression Materials For Partial Dentureyunie0959Noch keine Bewertungen
- Chloride & Protein in CSF: Biochemistry Lab - 3 StageDokument19 SeitenChloride & Protein in CSF: Biochemistry Lab - 3 Stagebknmy2nx9qNoch keine Bewertungen