Das könnte Ihnen auch gefallen
- Full Control of A PWM DCAC Converter For AC Voltage RegulationDokument9 SeitenFull Control of A PWM DCAC Converter For AC Voltage RegulationAndrés Felipe CelisNoch keine Bewertungen
- Digital Power-Conversion For The Analog EngineerDokument12 SeitenDigital Power-Conversion For The Analog EngineerfjwoemcuNoch keine Bewertungen
- Variable Speed AC Drives with Inverter Output FiltersVon EverandVariable Speed AC Drives with Inverter Output FiltersNoch keine Bewertungen
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachVon EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachNoch keine Bewertungen
- Zero Voltage Switching Resonant Power Devices by Bill AndrecakDokument28 SeitenZero Voltage Switching Resonant Power Devices by Bill AndrecakRekhamtrNoch keine Bewertungen
- AN296110 Current Sensing For Renewable EnergyDokument4 SeitenAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngNoch keine Bewertungen
- Digital Power Suply ControlDokument30 SeitenDigital Power Suply ControlPaul RomanNoch keine Bewertungen
- Chapter 5 - DC - Ac Converter (Part A)Dokument29 SeitenChapter 5 - DC - Ac Converter (Part A)andersonNoch keine Bewertungen
- Zero CrossingDokument16 SeitenZero CrossingAryan KapsNoch keine Bewertungen
- Digital Control of Switching Power ConvertersDokument6 SeitenDigital Control of Switching Power ConvertersNISHANT VATSNoch keine Bewertungen
- Duo Range Type PotentiometerDokument19 SeitenDuo Range Type Potentiometersaikarthick023Noch keine Bewertungen
- LECTURE 27 (Ch. 11) Ac Voltage Controllers: ECE 452 Power ElectronicsDokument15 SeitenLECTURE 27 (Ch. 11) Ac Voltage Controllers: ECE 452 Power ElectronicsSumukha KumarNoch keine Bewertungen
- Ac Meters Part 1Dokument22 SeitenAc Meters Part 1Vam ArmodiaNoch keine Bewertungen
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDokument7 SeitenTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- 1.2 Block Diagram With Explanation:: Chapter-1Dokument27 Seiten1.2 Block Diagram With Explanation:: Chapter-1SAMEULNoch keine Bewertungen
- The Phase Control Circuit The TC787Dokument10 SeitenThe Phase Control Circuit The TC787nansusanNoch keine Bewertungen
- Steady State Converter Analysis: Anjana S Ap, EeeDokument23 SeitenSteady State Converter Analysis: Anjana S Ap, Eeemridul mpNoch keine Bewertungen
- Slis 140 ADokument33 SeitenSlis 140 AAlvaro RoqueNoch keine Bewertungen
- Generating 50Hz PWM Using PIC16F877ADokument2 SeitenGenerating 50Hz PWM Using PIC16F877AZarko DacevicNoch keine Bewertungen
- Intelligent Power Supply Design SolutionsDokument16 SeitenIntelligent Power Supply Design SolutionsMeselao Meselao MeselaoNoch keine Bewertungen
- Project Status Review Semester: 7 EE (Group No: 2) Project I (2170001)Dokument51 SeitenProject Status Review Semester: 7 EE (Group No: 2) Project I (2170001)UmangNoch keine Bewertungen
- RK Engineering Earth Leakage RelayDokument1 SeiteRK Engineering Earth Leakage RelaySEO BDMNoch keine Bewertungen
- Design Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsDokument12 SeitenDesign Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsnandhakumarmeNoch keine Bewertungen
- Power Rectifier ASIC ControllerDokument5 SeitenPower Rectifier ASIC ControllerQuang TaNoch keine Bewertungen
- ZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterDokument6 SeitenZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterPradhapndk100% (1)
- Design and Research On The LCL Filter in Three-Phase PV PDFDokument4 SeitenDesign and Research On The LCL Filter in Three-Phase PV PDFMohammad Mahad NadeemNoch keine Bewertungen
- EE 435 SCR Notes3Dokument32 SeitenEE 435 SCR Notes3Dado GaudiNoch keine Bewertungen
- DC - Ac Inv.Dokument82 SeitenDC - Ac Inv.Jegadeeswari GNoch keine Bewertungen
- Frequency Meter Lecture NotesDokument4 SeitenFrequency Meter Lecture NotesSam AndersonNoch keine Bewertungen
- LM2907 LM2917 Conversor F - VDokument18 SeitenLM2907 LM2917 Conversor F - VAlejandra Vasquez GiraldoNoch keine Bewertungen
- 3731.three Phase Rectifier PresentationDokument48 Seiten3731.three Phase Rectifier PresentationMithunMNoch keine Bewertungen
- Bi-Directional DC-to-DC Converter For Solar Applications With Battery BackupDokument5 SeitenBi-Directional DC-to-DC Converter For Solar Applications With Battery BackupPaulius BruneikaNoch keine Bewertungen
- 3 Line ConverterDokument10 Seiten3 Line ConverterJay Romar PabianiaNoch keine Bewertungen
- Frequency To Voltage Converter ReportDokument5 SeitenFrequency To Voltage Converter ReportEssa SiddiquiNoch keine Bewertungen
- Analog Devices CD ReferenceDokument8 SeitenAnalog Devices CD ReferenceAcody Ie SyNoch keine Bewertungen
- Commutation Circuits PDFDokument2 SeitenCommutation Circuits PDFRalphNoch keine Bewertungen
- Unit V Ac Voltage ControllersDokument33 SeitenUnit V Ac Voltage Controllerssaikarthick023Noch keine Bewertungen
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurDokument6 SeitenOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraNoch keine Bewertungen
- Submitted By: Rameshkumar Lakshmi Prabha Abirami R LoganandhiniDokument22 SeitenSubmitted By: Rameshkumar Lakshmi Prabha Abirami R LoganandhiniAbirami RajaNoch keine Bewertungen
- DC To DC ConvertersDokument40 SeitenDC To DC ConvertersJamir CalNoch keine Bewertungen
- Solid State RelayDokument4 SeitenSolid State RelaymysisterandmeNoch keine Bewertungen
- DC Link CurrentDokument8 SeitenDC Link CurrentsubbannaNoch keine Bewertungen
- Power Supplies: Types of Power SupplyDokument9 SeitenPower Supplies: Types of Power Supplyjaspreet12321Noch keine Bewertungen
- 02 Uncontrolled AC To DC Converters3Dokument46 Seiten02 Uncontrolled AC To DC Converters3siegfred sicatNoch keine Bewertungen
- Chethan Raj D 3 Sem Mtech, CAIDDokument36 SeitenChethan Raj D 3 Sem Mtech, CAIDchethan100% (4)
- SMPC NotesDokument98 SeitenSMPC NotesHarsha Anantwar100% (1)
- Thyristor Three Phase, Six Pulse ControllerDokument18 SeitenThyristor Three Phase, Six Pulse ControllerAshlee VNoch keine Bewertungen
- International Refereed Journal of Engineering and Science (IRJES)Dokument8 SeitenInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNoch keine Bewertungen
- CYCLOCONVERTERSDokument46 SeitenCYCLOCONVERTERSHari Haran100% (1)
- Precision Rectifier CircuitsDokument13 SeitenPrecision Rectifier CircuitsWaqas PervaizNoch keine Bewertungen
- What Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?Dokument14 SeitenWhat Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?BALAJINoch keine Bewertungen
- Parallel Capacitor Inverter With Feedback DiodesDokument9 SeitenParallel Capacitor Inverter With Feedback DiodesJayant Kirpekar100% (1)
- Arduino SPWM Sine InverterDokument5 SeitenArduino SPWM Sine InvertermaurilioctbaNoch keine Bewertungen
- Report On Power SupplyDokument16 SeitenReport On Power SupplyKshitij GuptaNoch keine Bewertungen
- Buck Boost ConverterDokument3 SeitenBuck Boost ConverterArnoldo ZereceroNoch keine Bewertungen
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Power-system protection A Complete GuideVon EverandPower-system protection A Complete GuideBewertung: 1 von 5 Sternen1/5 (1)
- Multilevel Inverters: Introduction and Emergent TopologiesVon EverandMultilevel Inverters: Introduction and Emergent TopologiesNoch keine Bewertungen
- 08121-2901-01-Final-Report-Phase2 VFD CABLEDokument353 Seiten08121-2901-01-Final-Report-Phase2 VFD CABLEIsmael Ochoa JimenezNoch keine Bewertungen
- VX WorksDokument20 SeitenVX Worksmeena1827Noch keine Bewertungen
- VFD Wiring Best Practices - AP040076EN PDFDokument5 SeitenVFD Wiring Best Practices - AP040076EN PDFIsmael Ochoa JimenezNoch keine Bewertungen
- LV24 44 PDFDokument64 SeitenLV24 44 PDFIsmael Ochoa JimenezNoch keine Bewertungen
- Harold Stephen Black - Wikipedia, The Free EncyclopediaDokument3 SeitenHarold Stephen Black - Wikipedia, The Free EncyclopediaIsmael Ochoa JimenezNoch keine Bewertungen
- Video2.6 DashboardDokument1.104 SeitenVideo2.6 DashboardIsmael Ochoa JimenezNoch keine Bewertungen
- Orderdate Region Rep Item Units Unit Cost TotalDokument18 SeitenOrderdate Region Rep Item Units Unit Cost TotalIsmael Ochoa JimenezNoch keine Bewertungen
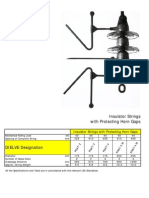
- Insulator Strings With Protecting Horn GapsDokument1 SeiteInsulator Strings With Protecting Horn GapsIsmael Ochoa JimenezNoch keine Bewertungen
- Outrush Reactors For Capacitor Banks - The Solution or A ProblemDokument2 SeitenOutrush Reactors For Capacitor Banks - The Solution or A ProblemHarish ChaluvadiNoch keine Bewertungen
- Joe Author Guide 260313Dokument8 SeitenJoe Author Guide 260313Ismael Ochoa JimenezNoch keine Bewertungen
- Sec 8Dokument3 SeitenSec 8Ismael Ochoa JimenezNoch keine Bewertungen
- 481 Lecture 14Dokument8 Seiten481 Lecture 14Ismael Ochoa JimenezNoch keine Bewertungen
- Insulation CoordinationDokument18 SeitenInsulation CoordinationIsmael Ochoa JimenezNoch keine Bewertungen
- Ieee 387 PDFDokument46 SeitenIeee 387 PDFIsmael Ochoa Jimenez100% (2)
- CTSpecDokument3 SeitenCTSpecsandeep_yadav100% (1)
- How To Get Pscad 4.2 Crack 64bitDokument1 SeiteHow To Get Pscad 4.2 Crack 64bitIsmael Ochoa JimenezNoch keine Bewertungen
- Design and Micro Controller Implementation of A Three Phase SCR Power ConverterDokument8 SeitenDesign and Micro Controller Implementation of A Three Phase SCR Power ConverterIsmael Ochoa JimenezNoch keine Bewertungen
- CommissioningDokument9 SeitenCommissioningIsmael Ochoa JimenezNoch keine Bewertungen
- TAP - MODEL - REC - CTR - 001 - MainDokument4 SeitenTAP - MODEL - REC - CTR - 001 - MainIsmael Ochoa JimenezNoch keine Bewertungen
- Global Title Format: ITU-T Recommendation Q.713Dokument4 SeitenGlobal Title Format: ITU-T Recommendation Q.713Pravesh Kumar ThakurNoch keine Bewertungen
- Argumentative EssayDokument7 SeitenArgumentative EssayHoang Thi Huyen DieuNoch keine Bewertungen
- 160 78-m1Dokument70 Seiten160 78-m1George100% (7)
- G-00-1169 - Grade Designation For Low Carbon Hot Rolled Steel Sheets Used in Automotive Applications - Rev 4Dokument7 SeitenG-00-1169 - Grade Designation For Low Carbon Hot Rolled Steel Sheets Used in Automotive Applications - Rev 4Prince Ali50% (2)
- Different Models of EIDokument13 SeitenDifferent Models of EIneena686236Noch keine Bewertungen
- Simon Bolivar PresentationDokument7 SeitenSimon Bolivar Presentationapi-345742212Noch keine Bewertungen
- CNL DivisionDokument38 SeitenCNL DivisionaniketnareNoch keine Bewertungen
- What Is E-CollaborationDokument7 SeitenWhat Is E-CollaborationToumba LimbreNoch keine Bewertungen
- Akira 007Dokument70 SeitenAkira 007Ocre OcreNoch keine Bewertungen
- Learn To Write Chapter 1 ProposalDokument52 SeitenLearn To Write Chapter 1 Proposalrozaimihlp23Noch keine Bewertungen
- ABS CBN CorporationDokument16 SeitenABS CBN CorporationAlyssa BeatriceNoch keine Bewertungen
- Agriculture: PAPER 3 Practical TestDokument8 SeitenAgriculture: PAPER 3 Practical Testmstudy123456Noch keine Bewertungen
- ESUR Guidelines 10.0 Final VersionDokument46 SeitenESUR Guidelines 10.0 Final Versionkon shireNoch keine Bewertungen
- Optimizing Patient Flow: Innovation Series 2003Dokument16 SeitenOptimizing Patient Flow: Innovation Series 2003Jeff SavageNoch keine Bewertungen
- Lux Level Calculation: WILSON ELECTRICAL ENGINEERING BOOKS (Simplified Edition 2020)Dokument1 SeiteLux Level Calculation: WILSON ELECTRICAL ENGINEERING BOOKS (Simplified Edition 2020)Wilson (Electrical Engineer)Noch keine Bewertungen
- Unit 5, Orders and Cover Letters of Orders For StsDokument13 SeitenUnit 5, Orders and Cover Letters of Orders For StsthuhienNoch keine Bewertungen
- Shaira Narrative Report (Final)Dokument7 SeitenShaira Narrative Report (Final)Sheryll TamangNoch keine Bewertungen
- Thesis Final 2 Number c1-c5Dokument167 SeitenThesis Final 2 Number c1-c5Kimverly DomaganNoch keine Bewertungen
- History of Nursing: Nursing in The Near EastDokument7 SeitenHistory of Nursing: Nursing in The Near EastCatherine PradoNoch keine Bewertungen
- My Initial Action Research PlanDokument3 SeitenMy Initial Action Research PlanKarl Kristian Embido100% (8)
- Defining The Christian Faith PaperDokument8 SeitenDefining The Christian Faith Paperlin tongNoch keine Bewertungen
- Application List: Required Items: A: Cpu-95 Ignition ModuleDokument12 SeitenApplication List: Required Items: A: Cpu-95 Ignition ModuleShubra DebNoch keine Bewertungen
- Olp Lesson PlanDokument2 SeitenOlp Lesson Planapi-654865620Noch keine Bewertungen
- Task 4 - Illustrating Psychoanalytic CriticismDokument9 SeitenTask 4 - Illustrating Psychoanalytic CriticismTroJaf OfficialNoch keine Bewertungen
- Examples Week1 CompressDokument6 SeitenExamples Week1 CompressAngel HuitradoNoch keine Bewertungen
- Sector San Juan Guidance For RepoweringDokument12 SeitenSector San Juan Guidance For RepoweringTroy IveyNoch keine Bewertungen
- 5 Waves AnswersDokument2 Seiten5 Waves AnswersNoor Ulain NabeelaNoch keine Bewertungen
- Obat Keras N0vember 2021Dokument137 SeitenObat Keras N0vember 2021antonNoch keine Bewertungen
- SIDPAC Standard Data Channels: Ch. No. Symbols Description UnitsDokument2 SeitenSIDPAC Standard Data Channels: Ch. No. Symbols Description UnitsRGFENoch keine Bewertungen
- Lecture 4 EMADokument36 SeitenLecture 4 EMAYai IbrahimNoch keine Bewertungen