Das könnte Ihnen auch gefallen
- 12 7Dokument17 Seiten12 7Sekut TawarNoch keine Bewertungen
- Chapter 12-15Dokument59 SeitenChapter 12-15Abdulaziz FarhanNoch keine Bewertungen
- x3 PDFDokument64 Seitenx3 PDFfadiNoch keine Bewertungen
- SN Sec 12-4 12-5Dokument19 SeitenSN Sec 12-4 12-5bigbangmelvanNoch keine Bewertungen
- Dynamics Lecture 2cDokument7 SeitenDynamics Lecture 2cNaqib NordinNoch keine Bewertungen
- Chapter 12: Kinematics of A ParticleDokument10 SeitenChapter 12: Kinematics of A ParticleStrider TeepeeNoch keine Bewertungen
- Motion in Two DimensionDokument26 SeitenMotion in Two DimensionKnowledgeIsTruePowerNoch keine Bewertungen
- Kinematics of A Particle AllDokument160 SeitenKinematics of A Particle AllaychiluhimhailuNoch keine Bewertungen
- Week 9 KinematicsDokument64 SeitenWeek 9 Kinematicsiwhy_Noch keine Bewertungen
- Curvilinear Motion: Normal and Tangential Components (Section 12.7)Dokument28 SeitenCurvilinear Motion: Normal and Tangential Components (Section 12.7)Mohamed DamraNoch keine Bewertungen
- Lecture L4 - Curvilinear Motion. Cartesian CoordinatesDokument8 SeitenLecture L4 - Curvilinear Motion. Cartesian Coordinates407melville1596Noch keine Bewertungen
- 1 3.3 Rectilinear Motion Notes Best To Be Done After 3.7Dokument3 Seiten1 3.3 Rectilinear Motion Notes Best To Be Done After 3.7Albert ChonNoch keine Bewertungen
- Introduction To MechanicsDokument10 SeitenIntroduction To MechanicsHaniNoch keine Bewertungen
- Unit 1: MAT113: Elementary MechanicsDokument41 SeitenUnit 1: MAT113: Elementary MechanicsỌláOlúwakìítán AgboọláNoch keine Bewertungen
- Normal and Tangetial ComponentsDokument15 SeitenNormal and Tangetial Componentsgear101890Noch keine Bewertungen
- Isu Module Subject: CE 223 and Dynamics of Rigid Bodies Continuation of Chapter 1 Topic 4 General Curvilinear MotionDokument22 SeitenIsu Module Subject: CE 223 and Dynamics of Rigid Bodies Continuation of Chapter 1 Topic 4 General Curvilinear MotioneysNoch keine Bewertungen
- Dynamics Lecture Accl-VelocityDokument18 SeitenDynamics Lecture Accl-VelocityAbhijeeth Nagaraj100% (4)
- Modul Xi Sem 1 2009-2010Dokument64 SeitenModul Xi Sem 1 2009-2010Herman_MLNoch keine Bewertungen
- Motion in Two or Three DimensionsDokument58 SeitenMotion in Two or Three DimensionsMarc Howard Detera PanganibanNoch keine Bewertungen
- Chapter 3: KinematicsDokument70 SeitenChapter 3: KinematicsCk100% (1)
- Normal and Tangential ComponentsDokument19 SeitenNormal and Tangential ComponentsGarrey BrionesNoch keine Bewertungen
- Curvilinear Motion: Rectangular Components Projectiles (Sections 12.4-12.6)Dokument34 SeitenCurvilinear Motion: Rectangular Components Projectiles (Sections 12.4-12.6)Mohamed DamraNoch keine Bewertungen
- Kinematics Using Vector Analysis: Standard CompetencyDokument18 SeitenKinematics Using Vector Analysis: Standard CompetencyYasheive saadiNoch keine Bewertungen
- 1.kinematics With Vector AnalysisDokument86 Seiten1.kinematics With Vector Analysisd3ssyNoch keine Bewertungen
- Feel Goods-Important DiscoveryDokument105 SeitenFeel Goods-Important DiscoveryKhyzer HayyatNoch keine Bewertungen
- Part 2: KinematicsDokument48 SeitenPart 2: KinematicsMinh KhôiNoch keine Bewertungen
- Introduction To Mechanics (B.SC) Engineering Mechanics Ch04 - KinematicsDokument17 SeitenIntroduction To Mechanics (B.SC) Engineering Mechanics Ch04 - KinematicsSaherNoch keine Bewertungen
- Lectures 4-5 Chapter 4 Fall 2009Dokument27 SeitenLectures 4-5 Chapter 4 Fall 2009tewari_skNoch keine Bewertungen
- Rigid Body Dynamics - Chap 12-14Dokument51 SeitenRigid Body Dynamics - Chap 12-14Na2ryNoch keine Bewertungen
- Lecture 2 Motion in Two or Three DimensionsDokument26 SeitenLecture 2 Motion in Two or Three Dimensionsa5759761Noch keine Bewertungen
- Kinematics of A Particle: Particle Motion Along A Curved PathDokument60 SeitenKinematics of A Particle: Particle Motion Along A Curved PathtomodachiNoch keine Bewertungen
- Dynamica Mehanika DDDDDDDDDFFFDokument57 SeitenDynamica Mehanika DDDDDDDDDFFFLeonard ReinaNoch keine Bewertungen
- PE2113-Chapter 12 - Dynamics - Draft1Dokument115 SeitenPE2113-Chapter 12 - Dynamics - Draft1Mohammed AlkhalifaNoch keine Bewertungen
- Lect1 DynamicsDokument28 SeitenLect1 Dynamicsأميرول فاروقاNoch keine Bewertungen
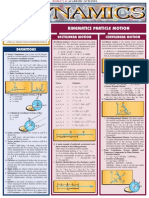
- Dynamics - Quick Reference SheetDokument4 SeitenDynamics - Quick Reference Sheetmech118Noch keine Bewertungen
- Chapter12 7 PsDokument14 SeitenChapter12 7 PsAmy ParkerNoch keine Bewertungen
- LEC 01&02 (Introduction, Vector and Constant Acceleration 061)Dokument24 SeitenLEC 01&02 (Introduction, Vector and Constant Acceleration 061)haseebtkhanNoch keine Bewertungen
- Dynamics: Lesson OutcomesDokument7 SeitenDynamics: Lesson OutcomesNaqib NordinNoch keine Bewertungen
- Unit 5 New PDFDokument52 SeitenUnit 5 New PDFAashish BhandariNoch keine Bewertungen
- Unit 5 New PDFDokument52 SeitenUnit 5 New PDFAashish BhandariNoch keine Bewertungen
- Motion in One DimensionDokument13 SeitenMotion in One DimensionMohammed Aftab Ahmed100% (1)
- Class 6 - Eqns of MotionDokument37 SeitenClass 6 - Eqns of MotionverbicarNoch keine Bewertungen
- Dynamics Rectilinear - Continuous and ErraticDokument67 SeitenDynamics Rectilinear - Continuous and ErraticJJ EnzonNoch keine Bewertungen
- 2 +Kinematics+of+particles+-+Part+IIDokument43 Seiten2 +Kinematics+of+particles+-+Part+IIBEYZA ÇAVUŞOĞLUNoch keine Bewertungen
- Vector Differential CalculusDokument28 SeitenVector Differential CalculusLAKSHMISH S HEGDENoch keine Bewertungen
- Projectile and Uniform Circular MotionDokument20 SeitenProjectile and Uniform Circular Motionbeenilicious100% (1)
- Chapter IIDokument160 SeitenChapter IIJay ChavezNoch keine Bewertungen
- PhysicsDokument11 SeitenPhysicsEthylNoch keine Bewertungen
- Kinematics: Iit-Physics - Set - IDokument50 SeitenKinematics: Iit-Physics - Set - IHemant KumarNoch keine Bewertungen
- Mechanics For Engineers DYNAMICS ChapterDokument88 SeitenMechanics For Engineers DYNAMICS ChapterCarmela SacdalanNoch keine Bewertungen
- Chapter 2 Motion Along A Straight LineDokument21 SeitenChapter 2 Motion Along A Straight LineAfnan Azizi100% (2)
- Motion in Two and Three Dimensions: R X I y J Z KDokument11 SeitenMotion in Two and Three Dimensions: R X I y J Z KWahyu SipahutarNoch keine Bewertungen
- V A V A: Applied Physics Department, HCMUT MATLAB Projects - Physics 1Dokument8 SeitenV A V A: Applied Physics Department, HCMUT MATLAB Projects - Physics 1teruaki ogawaNoch keine Bewertungen
- Kinematics of A ParticleDokument37 SeitenKinematics of A ParticleHush PereraNoch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Applications of Derivatives Rate of Change (Calculus) Mathematics Question BankVon EverandApplications of Derivatives Rate of Change (Calculus) Mathematics Question BankNoch keine Bewertungen
- Understanding Vector Calculus: Practical Development and Solved ProblemsVon EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNoch keine Bewertungen
- Phase Transformations and Material Instabilities in SolidsVon EverandPhase Transformations and Material Instabilities in SolidsMorton GurtinNoch keine Bewertungen
- Foundry LabDokument24 SeitenFoundry LabthodatisampathNoch keine Bewertungen
- SAE Convention 2012 Business ProposalDokument10 SeitenSAE Convention 2012 Business ProposalthodatisampathNoch keine Bewertungen
- PTFE DatasheetDokument2 SeitenPTFE DatasheetthodatisampathNoch keine Bewertungen
- 10 Vortex Tube Non ConventionalDokument3 Seiten10 Vortex Tube Non ConventionalrajdrklNoch keine Bewertungen
- A Brief History of Tape: An Exabyte White PaperDokument8 SeitenA Brief History of Tape: An Exabyte White PaperthodatisampathNoch keine Bewertungen
- Solid Works To Ansys Awesome!!Dokument2 SeitenSolid Works To Ansys Awesome!!ale80ingNoch keine Bewertungen
- Geometric Dimensioning and Tolerancing PDFDokument1 SeiteGeometric Dimensioning and Tolerancing PDFmarcinek77Noch keine Bewertungen
- MechanicalDokument5 SeitenMechanicalGaurav MakwanaNoch keine Bewertungen
- A God Centered LifeDokument10 SeitenA God Centered LifethodatisampathNoch keine Bewertungen
- 6 Kalimas of Islam With English TranslationDokument5 Seiten6 Kalimas of Islam With English TranslationAfaz RahmanNoch keine Bewertungen
- Ron Matusalem & Matusa of Florida, Inc., a Florida Corporation, Plaintiff-Counterdefendant v. Ron Matusalem, Inc., a Corporation of the Commonwealth of Puerto Rico, and United Liquors Corporation, a Florida Corporation, Defendants-Counterplaintiffs, Manuel A. Guarch, Jr. And Luisa Alvarez Soriano, Counterdefendants, 872 F.2d 1547, 11th Cir. (1989)Dokument13 SeitenRon Matusalem & Matusa of Florida, Inc., a Florida Corporation, Plaintiff-Counterdefendant v. Ron Matusalem, Inc., a Corporation of the Commonwealth of Puerto Rico, and United Liquors Corporation, a Florida Corporation, Defendants-Counterplaintiffs, Manuel A. Guarch, Jr. And Luisa Alvarez Soriano, Counterdefendants, 872 F.2d 1547, 11th Cir. (1989)Scribd Government DocsNoch keine Bewertungen
- SEPsim Installation Guide - V2.1Dokument12 SeitenSEPsim Installation Guide - V2.1Shamini GnanasothyNoch keine Bewertungen
- VLT - Go MS 90Dokument2 SeitenVLT - Go MS 90Raghu Ram100% (3)
- Biografi Pahlawan IndonesiaDokument20 SeitenBiografi Pahlawan Indonesiasafar banunNoch keine Bewertungen
- Work Policy 2016Dokument57 SeitenWork Policy 2016siddhartha bhattacharyyaNoch keine Bewertungen
- Practice Tests Electrical Potential Energy PDFDokument9 SeitenPractice Tests Electrical Potential Energy PDFFirdausia Rahma Putri100% (2)
- The Hamas CharterDokument16 SeitenThe Hamas CharterFrancesca PadoveseNoch keine Bewertungen
- Medieval India 2022 1007Dokument30 SeitenMedieval India 2022 1007Kumar ShivrajNoch keine Bewertungen
- Motor Insurance - Proposal Form Cum Transcript Letter For Miscellaneous Carrying ComprehensiveDokument2 SeitenMotor Insurance - Proposal Form Cum Transcript Letter For Miscellaneous Carrying ComprehensiveSantosh JaiswalNoch keine Bewertungen
- A 2009Dokument88 SeitenA 2009heroic_aliNoch keine Bewertungen
- Answer Sheet Week 7 & 8Dokument5 SeitenAnswer Sheet Week 7 & 8Jamel Khia Albarando LisondraNoch keine Bewertungen
- Configuration of VIO On Power6 PDFDokument39 SeitenConfiguration of VIO On Power6 PDFchengabNoch keine Bewertungen
- Dxgbvi Abdor Rahim OsmanmrDokument1 SeiteDxgbvi Abdor Rahim OsmanmrSakhipur TravelsNoch keine Bewertungen
- Accounting SyllabiDokument2 SeitenAccounting SyllabiJyotirmaya MaharanaNoch keine Bewertungen
- Week 4, 5, 6 Adjustments and Financial Statement Prep - ClosingDokument61 SeitenWeek 4, 5, 6 Adjustments and Financial Statement Prep - ClosingAarya SharmaNoch keine Bewertungen
- US vs. TANDOCDokument2 SeitenUS vs. TANDOCRay MondNoch keine Bewertungen
- Iso 5167 2 PDFDokument54 SeitenIso 5167 2 PDFSree288Noch keine Bewertungen
- Samuel Newton v. Weber CountyDokument25 SeitenSamuel Newton v. Weber CountyThe Salt Lake TribuneNoch keine Bewertungen
- Exchange Content UpdatesDokument2.163 SeitenExchange Content UpdatesAlejandro Cortes GarciaNoch keine Bewertungen
- UOK-Ph.D. Fee StructureDokument2 SeitenUOK-Ph.D. Fee StructureNeeraj MeenaNoch keine Bewertungen
- CD 116. Villaflor v. Summers, 41 Phil. 62 (1920)Dokument1 SeiteCD 116. Villaflor v. Summers, 41 Phil. 62 (1920)JMae MagatNoch keine Bewertungen
- Sworn Statement - TemarioDokument1 SeiteSworn Statement - Temariozyphora grace trillanesNoch keine Bewertungen
- UHF Integrated Long-Range Reader: Installation and User ManualDokument24 SeitenUHF Integrated Long-Range Reader: Installation and User ManualARMAND WALDONoch keine Bewertungen
- Cop 1240Dokument72 SeitenCop 1240Orhan100% (1)
- GMS Arrivals Checklist Non Tank 24 Feb 2022Dokument68 SeitenGMS Arrivals Checklist Non Tank 24 Feb 2022Oleg Frul100% (1)
- Swot Analysis MatrixDokument1 SeiteSwot Analysis MatrixAhmed Abdel-FattahNoch keine Bewertungen
- Non Banking Financial CompanyDokument39 SeitenNon Banking Financial Companymanoj phadtareNoch keine Bewertungen
- The Tipster1901, From "Wall Street Stories" by Lefevre, EdwinDokument20 SeitenThe Tipster1901, From "Wall Street Stories" by Lefevre, EdwinGutenberg.orgNoch keine Bewertungen
- 55 Salas, Jr. vs. Aguila, G.R. 202370, September 23, 2013Dokument3 Seiten55 Salas, Jr. vs. Aguila, G.R. 202370, September 23, 2013Lara Yulo100% (1)