Das könnte Ihnen auch gefallen
- 5th ModuleDokument23 Seiten5th ModuleJayasmita DasNoch keine Bewertungen
- Unit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, RobotDokument69 SeitenUnit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, Robotvithal100% (1)
- Oie 751 Robotics Unit 1 Q&a PDFDokument15 SeitenOie 751 Robotics Unit 1 Q&a PDFMICHEL RAJ0% (1)
- Prash - ROBOTIC VISIONDokument38 SeitenPrash - ROBOTIC VISIONpreethu02100% (1)
- Robotics Fulll 2 16 Marks With AnswerDokument57 SeitenRobotics Fulll 2 16 Marks With AnswerSiva RamanNoch keine Bewertungen
- Chapter 1 - Introduction To Machine Vision SystemsDokument22 SeitenChapter 1 - Introduction To Machine Vision SystemsZubir Zakaria100% (1)
- Robotics Lab Manual FinalDokument39 SeitenRobotics Lab Manual FinalSanthosh100% (4)
- U4 02-Chapter 2 Robot Work Cell Design and Control FinalDokument56 SeitenU4 02-Chapter 2 Robot Work Cell Design and Control Finalabhishek100% (3)
- 056 - ME8099, ME6010 Robotics - Question BankDokument6 Seiten056 - ME8099, ME6010 Robotics - Question BanksathishskymechNoch keine Bewertungen
- Evaluation Sheet For The Micro Project (Repaired)Dokument5 SeitenEvaluation Sheet For The Micro Project (Repaired)DEEPSHIKHA PANDEYNoch keine Bewertungen
- Robotics - Machine Loading and UnloadingDokument24 SeitenRobotics - Machine Loading and UnloadingKesavant Tkesavan0% (1)
- Chapter 7 Robot and Other Motion Control SystemsDokument15 SeitenChapter 7 Robot and Other Motion Control SystemsMohith SNoch keine Bewertungen
- Power Point Presentation On Robotics and ApplicationsDokument27 SeitenPower Point Presentation On Robotics and Applicationsdeepika_164100% (3)
- Anna University CP 2 MarksDokument62 SeitenAnna University CP 2 MarksKarthik S50% (2)
- Oops cs8392 16 MarksDokument85 SeitenOops cs8392 16 MarksAsst.Prof S&H100% (2)
- IV BTech I Semester CAD/CAM Exam QuestionsDokument4 SeitenIV BTech I Semester CAD/CAM Exam QuestionsMD KHALEELNoch keine Bewertungen
- Robotics ProgrammingDokument32 SeitenRobotics ProgrammingRahul HalderNoch keine Bewertungen
- Programme Specific Criteria (PSC)Dokument18 SeitenProgramme Specific Criteria (PSC)Manoj Kumar GNoch keine Bewertungen
- eInfoChips Interview QuestionsDokument2 SeiteneInfoChips Interview Questionsshafi hasmaniNoch keine Bewertungen
- Cad/Cam 2 Mid Online BitsDokument6 SeitenCad/Cam 2 Mid Online Bitstslnarayana33% (3)
- OIE751-Robotics Question Bank PDFDokument12 SeitenOIE751-Robotics Question Bank PDFmaragatharaj100% (1)
- Important Questions and Answers - Robot Drive Systems and End Effectors PDFDokument5 SeitenImportant Questions and Answers - Robot Drive Systems and End Effectors PDFvicky tNoch keine Bewertungen
- Unit I Fundamentals of Robot PDFDokument12 SeitenUnit I Fundamentals of Robot PDFAkash Prasanth100% (1)
- Zeroth Review UG Projects CircularDokument2 SeitenZeroth Review UG Projects Circularprashanth_cvvpNoch keine Bewertungen
- Aim & Procedure Model Finish & Accuracy Viva - Voce Total Marks 20 50 20 10 100Dokument10 SeitenAim & Procedure Model Finish & Accuracy Viva - Voce Total Marks 20 50 20 10 100PRAKASHNoch keine Bewertungen
- EE2023-Robotics and Automation PDFDokument13 SeitenEE2023-Robotics and Automation PDFveerapandianNoch keine Bewertungen
- Robotics Engineering: ME 406T Unit-1 Robot Fundamentals Lecture-1Dokument29 SeitenRobotics Engineering: ME 406T Unit-1 Robot Fundamentals Lecture-1werwa100% (1)
- Robotics Fulll 2&16 Marks With AnswerDokument64 SeitenRobotics Fulll 2&16 Marks With AnswerChandra SekarNoch keine Bewertungen
- CIM-2 MarksDokument18 SeitenCIM-2 MarksHod MechNoch keine Bewertungen
- Robotics NPTEL ASSIGNMENTDokument4 SeitenRobotics NPTEL ASSIGNMENTravitejatirumalapudi0% (1)
- 22534-2019-Winter-Model-Answer-Paper (Msbte Study Resources)Dokument32 Seiten22534-2019-Winter-Model-Answer-Paper (Msbte Study Resources)rashmi patil100% (1)
- 2 Robot Actuators and Drive SystemsDokument42 Seiten2 Robot Actuators and Drive SystemsSiva RamanNoch keine Bewertungen
- Iot MCQ Unit IDokument21 SeitenIot MCQ Unit IMadhubala SivajiNoch keine Bewertungen
- CS8603 Distributed System Model QuestionDokument2 SeitenCS8603 Distributed System Model QuestionPrasanna50% (2)
- Python Ppt-Module1 - 109202Dokument30 SeitenPython Ppt-Module1 - 109202manjulakinnalNoch keine Bewertungen
- IoT 801 Lab ManualDokument31 SeitenIoT 801 Lab ManualRaj PrajapatiNoch keine Bewertungen
- Robotics Question BankDokument8 SeitenRobotics Question BankmsckoneruNoch keine Bewertungen
- Question Bank Solutions (Module-2-IAT 1) - IOT - 15CS81Dokument12 SeitenQuestion Bank Solutions (Module-2-IAT 1) - IOT - 15CS81Shobhit Kushwaha100% (1)
- OIE 751 ROBOTICS Unit 4 Class 5 (20-10-2020)Dokument13 SeitenOIE 751 ROBOTICS Unit 4 Class 5 (20-10-2020)MICHEL RAJNoch keine Bewertungen
- Dynamics of Machinery 2 Marks All 5 UnitsDokument14 SeitenDynamics of Machinery 2 Marks All 5 UnitsDHINAKARANVEEMAN100% (2)
- Robot Cell Design and ControlDokument30 SeitenRobot Cell Design and Controlnandkishor joshi67% (3)
- CS 8351 Digital Principles and System Design MultiplexersDokument25 SeitenCS 8351 Digital Principles and System Design Multiplexerspadmaa1Noch keine Bewertungen
- Design and Implementation of a Low-Cost SCARA RobotDokument52 SeitenDesign and Implementation of a Low-Cost SCARA RobotMustafaMir100% (2)
- UNIT 4 MechatronicsDokument21 SeitenUNIT 4 MechatronicsMuthuvel M100% (1)
- Manufacturing Process Automation Questions and Answers - SanfoundryDokument7 SeitenManufacturing Process Automation Questions and Answers - SanfoundryKumar Ravindra100% (1)
- Question Bank RoboticsDokument4 SeitenQuestion Bank RoboticslakshmigsrNoch keine Bewertungen
- Module-3 IoT NotesDokument9 SeitenModule-3 IoT NotesNeetha DasNoch keine Bewertungen
- Control Systems Lab Manual 18EEL66 StudentDokument130 SeitenControl Systems Lab Manual 18EEL66 StudentChethan ChinnuNoch keine Bewertungen
- Unit 1Dokument41 SeitenUnit 1Sarthak Singh ChandelNoch keine Bewertungen
- 18EE754 NotesDokument2 Seiten18EE754 Notesdplikitha2001100% (2)
- Objectives Questions Mechanical Engineering RoboticsDokument13 SeitenObjectives Questions Mechanical Engineering RoboticsSai Krishna SK100% (2)
- Lesson Plan Microprocessor and Micro COntrollerDokument7 SeitenLesson Plan Microprocessor and Micro COntrollerRaja Pirian0% (2)
- MTech Robotics Lab Manual for Vaishnavi InstituteDokument26 SeitenMTech Robotics Lab Manual for Vaishnavi InstituteAbhijeet Sahu100% (3)
- Robot Programming - PART1Dokument48 SeitenRobot Programming - PART1Krushnasamy SuramaniyanNoch keine Bewertungen
- A Study in Industrial Robot ProgrammingDokument26 SeitenA Study in Industrial Robot ProgrammingPatel Dhaval100% (1)
- ROBOT PROGRAMMING: LEADTHROUGH & TEXTUAL METHODSDokument40 SeitenROBOT PROGRAMMING: LEADTHROUGH & TEXTUAL METHODSvithal082Noch keine Bewertungen
- RoboticsDokument26 SeitenRoboticsmkmnawaz972Noch keine Bewertungen
- Unit - Vi: ROBOT PROGRAMMING - A Robot Program May Be Defined As A Path inDokument15 SeitenUnit - Vi: ROBOT PROGRAMMING - A Robot Program May Be Defined As A Path inJoyNoch keine Bewertungen
- Methods of Robot Programming?Dokument3 SeitenMethods of Robot Programming?maheswaranNoch keine Bewertungen
- Robotics Chapter 6 - Robot ProgrammingDokument9 SeitenRobotics Chapter 6 - Robot Programmingtutorfelix777Noch keine Bewertungen
- True Stress-Strain DiagramDokument19 SeitenTrue Stress-Strain DiagramAmruth Babu V T100% (1)
- MCE 561 Computational Methods in Solid Mechanics Nonlinear IssuesDokument9 SeitenMCE 561 Computational Methods in Solid Mechanics Nonlinear Issuesprashant15Noch keine Bewertungen
- Types of Nonlinearity - Yash BhoyarDokument39 SeitenTypes of Nonlinearity - Yash BhoyaryashbhoyarNoch keine Bewertungen
- Nonlinear Analysis and TyperDokument56 SeitenNonlinear Analysis and TyperyashbhoyarNoch keine Bewertungen
- Theories of Failure AnalysisDokument30 SeitenTheories of Failure Analysismuniraju mNoch keine Bewertungen
- AWS90 Structural Nonlin Ch02 NonlinearDokument94 SeitenAWS90 Structural Nonlin Ch02 NonlinearyashbhoyarNoch keine Bewertungen
- AWS90 Structural Nonlin Ch02 NonlinearDokument94 SeitenAWS90 Structural Nonlin Ch02 NonlinearVictor SanchezNoch keine Bewertungen
- Types of Nonlinearity - Yash BhoyarDokument39 SeitenTypes of Nonlinearity - Yash BhoyaryashbhoyarNoch keine Bewertungen
- R5310105-Structural Analysis - IIDokument4 SeitenR5310105-Structural Analysis - IIsivabharathamurthyNoch keine Bewertungen
- BraginskiiDokument97 SeitenBraginskiicordella_francescoNoch keine Bewertungen
- Bridge Operational ClassificationDokument1 SeiteBridge Operational ClassificationFrancis DomingoNoch keine Bewertungen
- Case Study-R12 12Dokument81 SeitenCase Study-R12 12ranjitpandeyNoch keine Bewertungen
- Verilog Interview Questions & AnswersDokument6 SeitenVerilog Interview Questions & AnswersKrishna Saroja SankaNoch keine Bewertungen
- Manual Huawei Hg655bDokument36 SeitenManual Huawei Hg655bAnonymous nJm0Ff8z0sNoch keine Bewertungen
- Torque Specifications: Service Specifications - Ra60F Manual TransmissionDokument1 SeiteTorque Specifications: Service Specifications - Ra60F Manual TransmissionPedro Javier Castro SanchezNoch keine Bewertungen
- Proposed Rule: Domestic Mail Manual: Domestic Mailing Services New StandardsDokument45 SeitenProposed Rule: Domestic Mail Manual: Domestic Mailing Services New StandardsJustia.comNoch keine Bewertungen
- Introduction to Generators, Protection Schemes, Relays and MaintenanceDokument44 SeitenIntroduction to Generators, Protection Schemes, Relays and MaintenancerahulNrana100% (1)
- DWTS, WDWTS: Improving MRI Image Reconstruction with Directional Wavelet ThresholdingDokument1 SeiteDWTS, WDWTS: Improving MRI Image Reconstruction with Directional Wavelet ThresholdingSumit ChakravartyNoch keine Bewertungen
- High Voltage Grease Reduces Wear and ArcingDokument2 SeitenHigh Voltage Grease Reduces Wear and ArcingtlnferreiraNoch keine Bewertungen
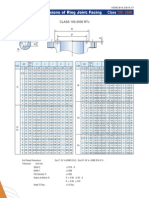
- RTJ Dimension ASME B16.5/B16.47Dokument1 SeiteRTJ Dimension ASME B16.5/B16.47parayilomer0% (1)
- 59-Form and Plot Frame Editor PDFDokument70 Seiten59-Form and Plot Frame Editor PDFAries TsaiNoch keine Bewertungen
- Pco2Dokument55 SeitenPco2camdentownNoch keine Bewertungen
- Peristaltic Transport of A Viscous Fluid in An Asymmetric Channel With Permeable WallsDokument13 SeitenPeristaltic Transport of A Viscous Fluid in An Asymmetric Channel With Permeable WallsRakeshconclaveNoch keine Bewertungen
- HCIE-R&S Huawei Certified Internetwork Expert-Routing and Switching Training Lab Guide PDFDokument228 SeitenHCIE-R&S Huawei Certified Internetwork Expert-Routing and Switching Training Lab Guide PDFliviuemanuelNoch keine Bewertungen
- ATS1801 - Interface PC - ImpDokument8 SeitenATS1801 - Interface PC - ImpluismantonioNoch keine Bewertungen
- Escorts F-15: Hydraulic Mobile Pick-n-Carry CraneDokument2 SeitenEscorts F-15: Hydraulic Mobile Pick-n-Carry CraneChandra MouliNoch keine Bewertungen
- M-III (II ECE-B, 1st SEM)Dokument63 SeitenM-III (II ECE-B, 1st SEM)venkatesh sripadNoch keine Bewertungen
- EML 4507 Spring 2017 HW11 SolutionDokument7 SeitenEML 4507 Spring 2017 HW11 SolutionUnmil PatelNoch keine Bewertungen
- EASA Part 66 Module 7 MCQ and Essay QuestionsDokument4 SeitenEASA Part 66 Module 7 MCQ and Essay QuestionsazadairNoch keine Bewertungen
- Capacitor Banks - Schedules FILLEDDokument11 SeitenCapacitor Banks - Schedules FILLEDyahyaNoch keine Bewertungen
- Fire Drencher System - Base-Engineer PDFDokument2 SeitenFire Drencher System - Base-Engineer PDFpequenita34100% (1)
- Under Water WeldingDokument23 SeitenUnder Water WeldingNishanth GowdaNoch keine Bewertungen
- D3755-14 Standard Test Method For Dielectric BreakdowDokument6 SeitenD3755-14 Standard Test Method For Dielectric Breakdowjose flores100% (1)
- PilotstarD AP02-S01 Mar09Dokument168 SeitenPilotstarD AP02-S01 Mar09Dharan NarayananNoch keine Bewertungen
- As 2560.2.1-2003 Sports Lighting Specific Applications - Lighting For Outdoor TennisDokument7 SeitenAs 2560.2.1-2003 Sports Lighting Specific Applications - Lighting For Outdoor TennisSAI Global - APAC0% (1)
- XXXXXXX XXXXXXX: Pour Exemple: Pour Exemple: ArteorDokument5 SeitenXXXXXXX XXXXXXX: Pour Exemple: Pour Exemple: ArteorGilbert MartinezNoch keine Bewertungen
- Engineering Structures: SciencedirectDokument8 SeitenEngineering Structures: SciencedirectFeleki AttilaNoch keine Bewertungen
- Corrosion in Oil and Gas Industry A Perspective On Corrosion InhibitorsDokument1 SeiteCorrosion in Oil and Gas Industry A Perspective On Corrosion InhibitorsAsma Sed100% (1)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveVon EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNoch keine Bewertungen
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityVon EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityBewertung: 5 von 5 Sternen5/5 (1)
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumVon EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumBewertung: 3 von 5 Sternen3/5 (12)
- An Ugly Truth: Inside Facebook's Battle for DominationVon EverandAn Ugly Truth: Inside Facebook's Battle for DominationBewertung: 4 von 5 Sternen4/5 (33)
- Algorithms to Live By: The Computer Science of Human DecisionsVon EverandAlgorithms to Live By: The Computer Science of Human DecisionsBewertung: 4.5 von 5 Sternen4.5/5 (722)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (227)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldVon EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (54)
- Dealers of Lightning: Xerox PARC and the Dawn of the Computer AgeVon EverandDealers of Lightning: Xerox PARC and the Dawn of the Computer AgeBewertung: 4 von 5 Sternen4/5 (88)
- AI Superpowers: China, Silicon Valley, and the New World OrderVon EverandAI Superpowers: China, Silicon Valley, and the New World OrderBewertung: 4.5 von 5 Sternen4.5/5 (398)
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (4)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessVon EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNoch keine Bewertungen
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseVon EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseBewertung: 3.5 von 5 Sternen3.5/5 (12)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideVon EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideBewertung: 5 von 5 Sternen5/5 (2)
- 8-Bit Apocalypse: The Untold Story of Atari's Missile CommandVon Everand8-Bit Apocalypse: The Untold Story of Atari's Missile CommandBewertung: 3.5 von 5 Sternen3.5/5 (10)
- The Mushroom at the End of the World: On the Possibility of Life in Capitalist RuinsVon EverandThe Mushroom at the End of the World: On the Possibility of Life in Capitalist RuinsBewertung: 4 von 5 Sternen4/5 (139)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansVon EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNoch keine Bewertungen
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldVon EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (107)
- Inventor of the Future: The Visionary Life of Buckminster FullerVon EverandInventor of the Future: The Visionary Life of Buckminster FullerBewertung: 4 von 5 Sternen4/5 (10)
- 97 Principles for Software Architects: Axioms for software architecture and development written by industry practitionersVon Everand97 Principles for Software Architects: Axioms for software architecture and development written by industry practitionersBewertung: 5 von 5 Sternen5/5 (21)
- Blood, Sweat, and Pixels: The Triumphant, Turbulent Stories Behind How Video Games Are MadeVon EverandBlood, Sweat, and Pixels: The Triumphant, Turbulent Stories Behind How Video Games Are MadeBewertung: 4.5 von 5 Sternen4.5/5 (335)