Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- ASTM D6938 (Densidad Método Nuclear)Dokument10 SeitenASTM D6938 (Densidad Método Nuclear)Gerardo ChahuaNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Grade 4 Mathematics Practice Test: Nebraska Department of Education 2010Dokument14 SeitenGrade 4 Mathematics Practice Test: Nebraska Department of Education 2010beauty kumariNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Theory of Machines - II: T.E./Insem. - 108Dokument2 SeitenTheory of Machines - II: T.E./Insem. - 108palashNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Absolute Relative ErrorDokument1 SeiteAbsolute Relative ErrorSamuel Flexor GyasiNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Strait of GibraltarDokument2 SeitenStrait of GibraltarGene RationNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- ISD Assignment 1 - Group 27Dokument68 SeitenISD Assignment 1 - Group 27Nelson LeeNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Partial Prestressing: Department of Applied Mechanics Sardar Vallabhbhai National Institute of Technology SURAT-395 007Dokument14 SeitenPartial Prestressing: Department of Applied Mechanics Sardar Vallabhbhai National Institute of Technology SURAT-395 007Ammar CivilNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Max Min FFT Filtering ECG SignalsDokument6 SeitenMax Min FFT Filtering ECG SignalsCAKPONoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- BP -342 Preliminary Examination Physics QuestionsDokument50 SeitenBP -342 Preliminary Examination Physics QuestionsFadly RamliNoch keine Bewertungen
- August 2022 Monthly Report on Protection Engineer OJT TrainingDokument13 SeitenAugust 2022 Monthly Report on Protection Engineer OJT Traininghumaid Al MazrouiNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- High Strength Prestressed Concrete Cube Test ResultsDokument5 SeitenHigh Strength Prestressed Concrete Cube Test ResultsKumar Narmadeshwar Gupta0% (1)
- Wang Et Al 2021Dokument13 SeitenWang Et Al 2021RAMU BNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Pre Board Xii Set-A 2023-24Dokument5 SeitenPre Board Xii Set-A 2023-24varun1231290Noch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- GDP-POPDokument11 SeitenGDP-POPOmja DwivediNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Determination of Rate Constant For Inversion of Cane SugarDokument3 SeitenDetermination of Rate Constant For Inversion of Cane SugarSamra ButtNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Phea Puthchanrithy - Lighting AssignmentDokument6 SeitenPhea Puthchanrithy - Lighting AssignmentRithy PuthchanNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
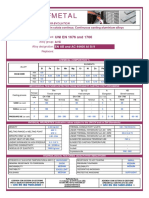
- The Aluminium Evolution: Continuous Casting Aluminium AlloysDokument2 SeitenThe Aluminium Evolution: Continuous Casting Aluminium AlloysHareth MRAIDINoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- 09 Trigonometric Waveforms and Identities Tutorial Questions OnlyDokument2 Seiten09 Trigonometric Waveforms and Identities Tutorial Questions Onlysam dowrickNoch keine Bewertungen
- Procedure Qualification Record SheetDokument2 SeitenProcedure Qualification Record SheeteliiiiiiNoch keine Bewertungen
- Electric Circuit Fundamentals Sergio Franco Solution ManualDokument6 SeitenElectric Circuit Fundamentals Sergio Franco Solution ManualHassanSadiq25% (4)
- Ghulam Ishaq Khan Institute of Engineering Sciences and Technology, Topi-23460Dokument3 SeitenGhulam Ishaq Khan Institute of Engineering Sciences and Technology, Topi-23460Saad RasheedNoch keine Bewertungen
- Live With Cuckoo ClocksDokument10 SeitenLive With Cuckoo ClocksNebojsa MijicNoch keine Bewertungen
- Homogeneous TransformDokument12 SeitenHomogeneous TransformharshNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Motor Control TheoriesDokument26 SeitenMotor Control TheoriesSardarChangezKhanNoch keine Bewertungen
- AIATS Schedule For RM (XII Passed) 2020-21Dokument2 SeitenAIATS Schedule For RM (XII Passed) 2020-21FarhanNoch keine Bewertungen
- LAB Manual ECTE423 923 12 03 2018 FINAL PDFDokument120 SeitenLAB Manual ECTE423 923 12 03 2018 FINAL PDFAmeer Hamza JanjuaNoch keine Bewertungen
- Bamboo joints techniquesDokument7 SeitenBamboo joints techniquesAndrianNoch keine Bewertungen
- Effect of Temperature, Time and Amount of Alkaline Treated Cotton Seaweed (ATS) Products Dried in A Dryer Oven On Product QualityDokument7 SeitenEffect of Temperature, Time and Amount of Alkaline Treated Cotton Seaweed (ATS) Products Dried in A Dryer Oven On Product QualityJARRIS REMBRANT BATTEAUX MAILUASNoch keine Bewertungen
- 4688 Tube To Tube Sheet Weld Scanning ServiceDokument2 Seiten4688 Tube To Tube Sheet Weld Scanning ServiceBaher ElsheikhNoch keine Bewertungen
- Q1. The Graph Shows The Distribution of Rod Cells and Cone Cells Across The Retina of A HumanDokument6 SeitenQ1. The Graph Shows The Distribution of Rod Cells and Cone Cells Across The Retina of A HumanQuang Huy PhạmNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)