Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Using Dapper Asynchronously inDokument1 SeiteUsing Dapper Asynchronously inGiovani BrondaniNoch keine Bewertungen
- SR No Co Name Salutation Person Designation Contact NoDokument4 SeitenSR No Co Name Salutation Person Designation Contact NoAnindya SharmaNoch keine Bewertungen
- Restoration and Adaptive Re-Use of Queen Mary's High School: Phase-1Dokument4 SeitenRestoration and Adaptive Re-Use of Queen Mary's High School: Phase-1Sonali GurungNoch keine Bewertungen
- Siemens Engineering Manual V7Dokument338 SeitenSiemens Engineering Manual V7Jeremy Branch100% (2)
- Chapter 2 - 2 Plane Curvilinear MotionDokument37 SeitenChapter 2 - 2 Plane Curvilinear MotionAlfredo Ruiz ValenciaNoch keine Bewertungen
- WDU 2.5 enDokument14 SeitenWDU 2.5 enAhmadBintangNegoroNoch keine Bewertungen
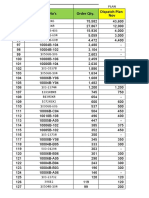
- Order Qty Vs Dispatch Plan - 04 11 20Dokument13 SeitenOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPNoch keine Bewertungen
- Chemical Thermodynamics: Theodore L. Brown H. Eugene Lemay, Jr. and Bruce E. BurstenDokument43 SeitenChemical Thermodynamics: Theodore L. Brown H. Eugene Lemay, Jr. and Bruce E. BurstenChery-an PletNoch keine Bewertungen
- 25252525Dokument38 Seiten25252525Ivan GonzalezNoch keine Bewertungen
- Adjusting Well Pump Pressure SwitchesDokument1 SeiteAdjusting Well Pump Pressure SwitchesD_D_76Noch keine Bewertungen
- Bubbling Kun NiDokument7 SeitenBubbling Kun NiBelen CRNoch keine Bewertungen
- Good Practices in Government Resource Planning, Developed Vs Developing CountriesDokument11 SeitenGood Practices in Government Resource Planning, Developed Vs Developing CountriesFreeBalanceGRPNoch keine Bewertungen
- Kinematics-03-Subjective SolvedDokument11 SeitenKinematics-03-Subjective SolvedRaju SinghNoch keine Bewertungen
- Applying Six Sigma at 3MDokument13 SeitenApplying Six Sigma at 3MdchNoch keine Bewertungen
- AHRLACDokument18 SeitenAHRLACVictor Pileggi100% (1)
- Know PlywoodDokument3 SeitenKnow PlywoodNirvana NircisNoch keine Bewertungen
- VXN150 Vixion Fuel Tank PDFDokument3 SeitenVXN150 Vixion Fuel Tank PDFHarris Jum'aniandaNoch keine Bewertungen
- ElectronicsDokument3 SeitenElectronicsashishkumar218Noch keine Bewertungen
- Portal Info StubDokument11 SeitenPortal Info Stubzamanqomaru8Noch keine Bewertungen
- Semantic and Frames PDFDokument20 SeitenSemantic and Frames PDFsyncasterNoch keine Bewertungen
- Q3 NSP - SLP - RLPDokument41 SeitenQ3 NSP - SLP - RLPRushi RavalNoch keine Bewertungen
- Problems PDFDokument9 SeitenProblems PDFEduarGelvezNoch keine Bewertungen
- Cbse PMT 2012Dokument33 SeitenCbse PMT 2012Vishal RamakrishnanNoch keine Bewertungen
- 4.10) Arch Shaped Self Supporting Trussless Roof SpecificationsDokument11 Seiten4.10) Arch Shaped Self Supporting Trussless Roof Specificationshebh123100% (1)
- 3310 ATF DEXRON III H PDS Vesion 3Dokument2 Seiten3310 ATF DEXRON III H PDS Vesion 3luayhabibbNoch keine Bewertungen
- Heat Transfer - A Basic Approach - OzisikDokument760 SeitenHeat Transfer - A Basic Approach - OzisikMaraParesque91% (33)
- Advanced Fluid Mechanics: Luigi Di Micco Email: Luigi - Dimicco@dicea - Unipd.itDokument16 SeitenAdvanced Fluid Mechanics: Luigi Di Micco Email: Luigi - Dimicco@dicea - Unipd.itHubert MoforNoch keine Bewertungen
- Doing Hot Work On Gas ShipDokument5 SeitenDoing Hot Work On Gas ShipAnonymous icnhaNsFNoch keine Bewertungen
- HighpuritysealsDokument6 SeitenHighpuritysealstuannhocutNoch keine Bewertungen