Das könnte Ihnen auch gefallen
- Codeur IncDokument4 SeitenCodeur IncassiahakmiNoch keine Bewertungen
- Cours Bac S Si - Acquerir L Information - Les CapteursDokument27 SeitenCours Bac S Si - Acquerir L Information - Les CapteursKhaled Ouni100% (1)
- 02 CapteursDokument85 Seiten02 CapteursSidahmed LarbaouiNoch keine Bewertungen
- LOGIQUE - COURS Et TDDokument110 SeitenLOGIQUE - COURS Et TDSidahmed Larbaoui100% (3)
- Electricité Industriel de BaseDokument54 SeitenElectricité Industriel de BaseKhalid Tami50% (2)
- Course ELectronique de Puissance FRDokument168 SeitenCourse ELectronique de Puissance FRAhmad JammalNoch keine Bewertungen
- Les MoteursDokument76 SeitenLes MoteursOucema AbNoch keine Bewertungen
- Configuration IpDokument154 SeitenConfiguration IpHicham BoutoucheNoch keine Bewertungen
- Mesure Des Tensions Et Des CourantsDokument5 SeitenMesure Des Tensions Et Des Courantsbelaid2009Noch keine Bewertungen
- Synthese Sur Les Moteurs Electriques (VF) Nyebe Ndongo Jeanne MichelleDokument34 SeitenSynthese Sur Les Moteurs Electriques (VF) Nyebe Ndongo Jeanne MichelleMichelle NyebeNoch keine Bewertungen
- Regulation Numerique TempDokument36 SeitenRegulation Numerique TempDK KDNoch keine Bewertungen
- Ugv PDFDokument30 SeitenUgv PDFKarim ZineNoch keine Bewertungen
- Tia Portal Automatisé PDFDokument4 SeitenTia Portal Automatisé PDFSaid ZaidiNoch keine Bewertungen
- Poly Master GSB PDFDokument32 SeitenPoly Master GSB PDFMeryem BerrNoch keine Bewertungen
- Freinage DynamiqueDokument12 SeitenFreinage Dynamiqueramzi2521Noch keine Bewertungen
- SERIE TD N 2 Actionneurs PDFDokument2 SeitenSERIE TD N 2 Actionneurs PDFdwe merNoch keine Bewertungen
- TP SQL Projet Films CciDokument2 SeitenTP SQL Projet Films Cciamira_menif-1Noch keine Bewertungen
- 2electronique de PuissanceDokument240 Seiten2electronique de PuissanceYassine Zahar100% (1)
- Nom Des Pièces - Impression 3DDokument13 SeitenNom Des Pièces - Impression 3Dazamama100% (1)
- Demonstrateur ElectromecaniqueDokument128 SeitenDemonstrateur ElectromecaniqueMarco OnthenetNoch keine Bewertungen
- Wa0019.Dokument47 SeitenWa0019.El Khalifi SaidNoch keine Bewertungen
- Cours Electronique de Puissance L1Dokument86 SeitenCours Electronique de Puissance L1KABORENoch keine Bewertungen
- Rslogix 5000Dokument951 SeitenRslogix 5000ChouaibNoch keine Bewertungen
- Controle Des Puissances Active Et Reactive de La Machine A Double Alimentation (Dfim) PDFDokument160 SeitenControle Des Puissances Active Et Reactive de La Machine A Double Alimentation (Dfim) PDFhb1966100% (2)
- Gyroscopes & AccéléromètresDokument37 SeitenGyroscopes & AccéléromètresRoboCEPT100% (2)
- LandisGYR E350Dokument8 SeitenLandisGYR E350EddyNoch keine Bewertungen
- I EEPF HAN 130611 Rev2Dokument60 SeitenI EEPF HAN 130611 Rev2Rabah100% (1)
- TD4 Machine ASynchroneDokument2 SeitenTD4 Machine ASynchroneDupontSaint0% (1)
- 64 CR Lycée ST Charles Canne I SeeDokument21 Seiten64 CR Lycée ST Charles Canne I SeeOmar BlNoch keine Bewertungen
- AutomatismeDokument12 SeitenAutomatismeDayang DayangNoch keine Bewertungen
- Enpu MemoireDokument139 SeitenEnpu Memoireousmanou oumarouNoch keine Bewertungen
- Electronique de Puissance L2 S2Dokument74 SeitenElectronique de Puissance L2 S2Auzlem Faouzi100% (1)
- TP 01 Avec Annexe PDFDokument11 SeitenTP 01 Avec Annexe PDFLaila RabhiNoch keine Bewertungen
- Simulation Temps-Réel Des Dispositifs D'electronique de Puissance Dédiés AuxDokument235 SeitenSimulation Temps-Réel Des Dispositifs D'electronique de Puissance Dédiés AuxHerimalala HeriNoch keine Bewertungen
- TP4 - Filtres ActifsDokument8 SeitenTP4 - Filtres ActifsBecem Trigui100% (1)
- Systemes Echantillonnés D'ordre 2Dokument2 SeitenSystemes Echantillonnés D'ordre 2khayyamNoch keine Bewertungen
- Spe OEM 11 DemodulationDokument13 SeitenSpe OEM 11 Demodulationla physique selon le programme Français100% (1)
- Electricite FicheDokument12 SeitenElectricite Fichesaid3232Noch keine Bewertungen
- Formation Chauvin Arnoux Sur La Sécurité Electrique V3Dokument51 SeitenFormation Chauvin Arnoux Sur La Sécurité Electrique V3Faiez GhrabNoch keine Bewertungen
- Automatique Continu Numerique OuldbouamamaDokument339 SeitenAutomatique Continu Numerique OuldbouamamaRashid Elaychii67% (3)
- Cours PWMDokument43 SeitenCours PWMzakarii67% (3)
- Capteurs Inductifs de PositionDokument41 SeitenCapteurs Inductifs de PositionaymendabNoch keine Bewertungen
- Rapport PfaDokument46 SeitenRapport PfaErrafiy OmarNoch keine Bewertungen
- 201 - Termes de BobinagesasyncDokument4 Seiten201 - Termes de BobinagesasynceljhNoch keine Bewertungen
- 34 ElectromecaniqueDokument51 Seiten34 ElectromecaniqueStairway To Heaven MoreNoch keine Bewertungen
- Schéma Montage Va Et VientDokument5 SeitenSchéma Montage Va Et VientAmira Mira MiritaNoch keine Bewertungen
- Analyse Fonctionnelle (Cours)Dokument13 SeitenAnalyse Fonctionnelle (Cours)ESSOME ESSOME OLIVIER STEPHANENoch keine Bewertungen
- III AmplidiffDokument14 SeitenIII AmplidiffYassin HachanaNoch keine Bewertungen
- M 06 - TFI - Electricite de BaseDokument94 SeitenM 06 - TFI - Electricite de BasetestNoch keine Bewertungen
- TP2 Arduino SerialDokument7 SeitenTP2 Arduino SerialBarry Mamadou LamaraneNoch keine Bewertungen
- Vehicule Electrique Etude Et Modélisation D'une Machine Synchrone À Aimant Permanent PDFDokument217 SeitenVehicule Electrique Etude Et Modélisation D'une Machine Synchrone À Aimant Permanent PDFB. BENCHAANoch keine Bewertungen
- RapportKR 2Dokument82 SeitenRapportKR 2Mahdi FilaliNoch keine Bewertungen
- Guide D'application Gamme de Relais NP800 PDFDokument99 SeitenGuide D'application Gamme de Relais NP800 PDFbxteo100% (1)
- G2-Vacon AC Drives Advanced - Revision2 FRDokument84 SeitenG2-Vacon AC Drives Advanced - Revision2 FRMohammed Amine KenedNoch keine Bewertungen
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueVon EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueNoch keine Bewertungen
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsVon EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsNoch keine Bewertungen
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoVon EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoNoch keine Bewertungen
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants. Le guide complet de la Fusion 360 d'Autodesk !Von EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants. Le guide complet de la Fusion 360 d'Autodesk !Noch keine Bewertungen
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Von EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Noch keine Bewertungen
- SD EmseDokument61 SeitenSD EmseSidahmed LarbaouiNoch keine Bewertungen
- Epuchap 4Dokument4 SeitenEpuchap 4Sidahmed LarbaouiNoch keine Bewertungen
- 2 Avant ProposDokument1 Seite2 Avant ProposSidahmed LarbaouiNoch keine Bewertungen
- Systèmes Asservis LinéairesDokument33 SeitenSystèmes Asservis LinéairesSidahmed LarbaouiNoch keine Bewertungen
- 2011EVRY0029Dokument230 Seiten2011EVRY0029Sidahmed LarbaouiNoch keine Bewertungen
- Td101capteurs Corrige PDFDokument1 SeiteTd101capteurs Corrige PDFSidahmed LarbaouiNoch keine Bewertungen
- Michel Pinard - La Commande Électronique Des Machines-Dunod (2013) PDFDokument416 SeitenMichel Pinard - La Commande Électronique Des Machines-Dunod (2013) PDFSidahmed LarbaouiNoch keine Bewertungen
- Correction SerieDokument6 SeitenCorrection SerieSidahmed LarbaouiNoch keine Bewertungen
- Chap4 HacheurDokument93 SeitenChap4 HacheurSidahmed LarbaouiNoch keine Bewertungen
- TD Licence ELM 7-12Dokument2 SeitenTD Licence ELM 7-12Sidahmed LarbaouiNoch keine Bewertungen
- Abderrahmane KhemisDokument7 SeitenAbderrahmane KhemisSidahmed LarbaouiNoch keine Bewertungen
- Circuit LogiqueDokument23 SeitenCircuit LogiqueSidahmed LarbaouiNoch keine Bewertungen
- MicrocontrôleursDokument16 SeitenMicrocontrôleursMouhcine Ben MoussaNoch keine Bewertungen
- Cours Systemes Temps ReelsDokument50 SeitenCours Systemes Temps Reelsalkassoum0% (1)
- Cours - ABDELLI Radia - Théorie Du SignalDokument68 SeitenCours - ABDELLI Radia - Théorie Du SignalHayet HayetNoch keine Bewertungen
- TN cm2 1Dokument45 SeitenTN cm2 1salma chtiouiNoch keine Bewertungen
- Initiation 1 TIA Portal MS1 PDFDokument46 SeitenInitiation 1 TIA Portal MS1 PDFAnonymous KI2Dwk21dn100% (1)
- G8e NU IF 013812801 Ed1CDokument28 SeitenG8e NU IF 013812801 Ed1CTopcu Tıbbi CihazlarNoch keine Bewertungen
- 4A-Note de Cours CC.19mai2015 - CopieDokument108 Seiten4A-Note de Cours CC.19mai2015 - CopieXavier MoinyNoch keine Bewertungen
- Didacticiel de 1134Dokument55 SeitenDidacticiel de 1134mauricetappaNoch keine Bewertungen
- Exercice D'application 2 Modulation D'amplitudeDokument1 SeiteExercice D'application 2 Modulation D'amplitudeHk HjNoch keine Bewertungen
- CHAPITRE I Electronique Fondamentale 1 PDFDokument15 SeitenCHAPITRE I Electronique Fondamentale 1 PDFBoudjema SoudedNoch keine Bewertungen
- Les Pertes Des TransfoDokument5 SeitenLes Pertes Des TransfoOussama Mohammad MessadiNoch keine Bewertungen
- TD 2 EcDokument2 SeitenTD 2 EcChai mae AgnawNoch keine Bewertungen
- Confidentielle - Dupoux - ClineDokument147 SeitenConfidentielle - Dupoux - ClineHoussamCatalouniRedJohnNoch keine Bewertungen
- Equipement, Liste Materiel Et Reglette A Bornes CCN 001408.10.de - dp.02585Dokument5 SeitenEquipement, Liste Materiel Et Reglette A Bornes CCN 001408.10.de - dp.02585kamilawehbeNoch keine Bewertungen
- 970 Bts Crsa E52 2013 PDFDokument31 Seiten970 Bts Crsa E52 2013 PDFtagne simo rodrigueNoch keine Bewertungen
- Manuel Caneco BT Nouveautés V5.4-FraDokument48 SeitenManuel Caneco BT Nouveautés V5.4-FraYDDFPNoch keine Bewertungen
- MOTORTECH Indicateur Tension EN-FRDokument4 SeitenMOTORTECH Indicateur Tension EN-FRdrevetph6233Noch keine Bewertungen
- CCTP - Salle de ConférenceDokument10 SeitenCCTP - Salle de ConférenceYacoubou ATTYNoch keine Bewertungen
- STR-1.1.IntroSTR 2Dokument25 SeitenSTR-1.1.IntroSTR 2TiMo ĦãMźàNoch keine Bewertungen
- Devoir de Synthese 3-GEDokument4 SeitenDevoir de Synthese 3-GEBouabdellaoui saif ennasrNoch keine Bewertungen
- Induction Magnétique 2Dokument8 SeitenInduction Magnétique 2Ben ZeilanNoch keine Bewertungen
- Devoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2020-2021) MR Handoura NaceurDokument5 SeitenDevoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2020-2021) MR Handoura NaceurchihebNoch keine Bewertungen
- M - 04 - Analyse de Circuits À Courant ContinuDokument51 SeitenM - 04 - Analyse de Circuits À Courant Continualmis100% (2)
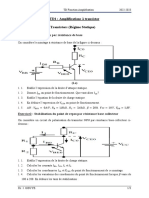
- TD1: Amplifications À Transistor I. Polarisation de Transistors (Régime Statique)Dokument3 SeitenTD1: Amplifications À Transistor I. Polarisation de Transistors (Régime Statique)Seydina Ndiaye100% (1)
- Archi Cours4Dokument22 SeitenArchi Cours4Abdeslam MOUKHLISSNoch keine Bewertungen
- 03 Force PlaceDokument8 Seiten03 Force PlaceZzen NaxcNoch keine Bewertungen
- 119T7030 A3-3 PDFDokument18 Seiten119T7030 A3-3 PDFAymen SkanderNoch keine Bewertungen
- Contrôle Exam - MarkupDokument3 SeitenContrôle Exam - MarkupMohammed KarbaNoch keine Bewertungen
- Modelsim QuartusDokument23 SeitenModelsim QuartusAli AlFiguiguiNoch keine Bewertungen