Das könnte Ihnen auch gefallen
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationVon EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNoch keine Bewertungen
- Electronics CircuitDokument0 SeitenElectronics Circuitwww.bhawesh.com.npNoch keine Bewertungen
- Advanced Digital Signal Processing and Noise ReductionVon EverandAdvanced Digital Signal Processing and Noise ReductionBewertung: 5 von 5 Sternen5/5 (1)
- Practical: - Transmission and AttenuationDokument4 SeitenPractical: - Transmission and AttenuationasithNoch keine Bewertungen
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsVon EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNoch keine Bewertungen
- DSP Lect Note - 6th Sem Etc - PNGDokument91 SeitenDSP Lect Note - 6th Sem Etc - PNGwapota4898Noch keine Bewertungen
- Libraries and Attributes (Logism)Dokument7 SeitenLibraries and Attributes (Logism)AKooXiiYSmaelNoch keine Bewertungen
- Design and Implementation of Adaptive Median Filter For Impulse Noise Reduction in Gray Scale ImagesDokument8 SeitenDesign and Implementation of Adaptive Median Filter For Impulse Noise Reduction in Gray Scale ImagesInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- CW and Frequency Modulated RadarDokument30 SeitenCW and Frequency Modulated RadarbeslinNoch keine Bewertungen
- CD4067 Multiplexer Controls LEDs Code CircuitDokument3 SeitenCD4067 Multiplexer Controls LEDs Code CircuitAndreaZannoNoch keine Bewertungen
- Microprocessor Question BankDokument4 SeitenMicroprocessor Question BankSubrahmanyam BeharaNoch keine Bewertungen
- MatlabGuide - Identification GuideDokument7 SeitenMatlabGuide - Identification GuideCícero G. ReisNoch keine Bewertungen
- Assignment-2: Department of Electrnics & Communication Engineering, KitswDokument14 SeitenAssignment-2: Department of Electrnics & Communication Engineering, KitswmahaNoch keine Bewertungen
- Unit I - Discrete State-Variable Technique Q.No Questions: Scalar Adder IntegratorDokument184 SeitenUnit I - Discrete State-Variable Technique Q.No Questions: Scalar Adder IntegratorAgatha ChristieNoch keine Bewertungen
- Bel Assignment-3 Solution Sem-II 06032016 KarDokument16 SeitenBel Assignment-3 Solution Sem-II 06032016 Karaman pandeyNoch keine Bewertungen
- Matlab Electrical Example PDFDokument9 SeitenMatlab Electrical Example PDFUmair AhmedNoch keine Bewertungen
- MCQDokument7 SeitenMCQ19himaniNoch keine Bewertungen
- Volterra SeriesDokument5 SeitenVolterra SeriesAnimasahun Olamide HammedNoch keine Bewertungen
- Lecture 1 PDFDokument43 SeitenLecture 1 PDF1saifulNoch keine Bewertungen
- Frequency Response Analysis and Design PDFDokument281 SeitenFrequency Response Analysis and Design PDFfergusoniseNoch keine Bewertungen
- 2 Motor Control JoystickDokument5 Seiten2 Motor Control JoystickMarius DanilaNoch keine Bewertungen
- Adaptive Control PDFDokument380 SeitenAdaptive Control PDFSanjiv CrNoch keine Bewertungen
- Arduino 3D Scanner DIY - 1Dokument4 SeitenArduino 3D Scanner DIY - 1Hilman HazmiNoch keine Bewertungen
- Design Model Simulink To Denoise Ecg Signal UsingDokument18 SeitenDesign Model Simulink To Denoise Ecg Signal UsingMaydiana Nurul K0% (1)
- Passive Low Pass FilterDokument5 SeitenPassive Low Pass FilterAnonymous SOQFPWBNoch keine Bewertungen
- Sigma Delta Modulator NutshellDokument5 SeitenSigma Delta Modulator NutshellZubair MohammedNoch keine Bewertungen
- Digital Signal ProcessingDokument6 SeitenDigital Signal ProcessingNemanja StevanovićNoch keine Bewertungen
- AI-Lecture 12 - Simple PerceptronDokument24 SeitenAI-Lecture 12 - Simple PerceptronMadiha Nasrullah100% (1)
- Camera Calibration - Estimating Extrinsic and Intrinsic ParametersDokument41 SeitenCamera Calibration - Estimating Extrinsic and Intrinsic Parametersbharadwaja502Noch keine Bewertungen
- Pulse Code ModulationDokument11 SeitenPulse Code ModulationMaryam ShahNoch keine Bewertungen
- Using MATLAB For Signal Analysis PDFDokument56 SeitenUsing MATLAB For Signal Analysis PDFAhmad PohanNoch keine Bewertungen
- Electronic FilterDokument10 SeitenElectronic Filterapi-3805241Noch keine Bewertungen
- Pole-Zero Plots StabilityDokument9 SeitenPole-Zero Plots StabilityNaveen SaiNoch keine Bewertungen
- EEL 3123 Lab Manual - PDF LABDokument79 SeitenEEL 3123 Lab Manual - PDF LABkamalNoch keine Bewertungen
- DSP Using Matlab® - 4Dokument40 SeitenDSP Using Matlab® - 4api-372116488% (8)
- Ec 6511 Digital Signal Processing Lab Manual PDFDokument88 SeitenEc 6511 Digital Signal Processing Lab Manual PDFBala913Noch keine Bewertungen
- DSP Lab Experiments in MATLABDokument45 SeitenDSP Lab Experiments in MATLABDinesh PalavalasaNoch keine Bewertungen
- Wavelet TransformDokument41 SeitenWavelet Transformarshi khan100% (1)
- Interview QuestionsDokument4 SeitenInterview QuestionsAlbert YehNoch keine Bewertungen
- Lab6 Phase Locked LoopsDokument20 SeitenLab6 Phase Locked Loopsuitce2011Noch keine Bewertungen
- Electronics II NotesDokument41 SeitenElectronics II NotesactuatorNoch keine Bewertungen
- The Decision-Feedback Equalizer PDFDokument5 SeitenThe Decision-Feedback Equalizer PDFHuy Nguyễn QuốcNoch keine Bewertungen
- Lab File - Digital Signal Processing Using MATLABDokument32 SeitenLab File - Digital Signal Processing Using MATLABCutie100% (2)
- Multirate Signal Processing 1.4Dokument45 SeitenMultirate Signal Processing 1.4criharshaNoch keine Bewertungen
- Comp ArithDokument68 SeitenComp ArithTun LeNoch keine Bewertungen
- DSP Lab Manual PerfectDokument139 SeitenDSP Lab Manual PerfectSsgn Srinivasarao50% (2)
- Complex Engineering Problem StatementDokument10 SeitenComplex Engineering Problem StatementMuhammad MashamNoch keine Bewertungen
- X-Y Recorder - The Web's Where You Study In!Dokument3 SeitenX-Y Recorder - The Web's Where You Study In!Srihari KilaruNoch keine Bewertungen
- Amplitude Modulation of PSK Project ReportDokument6 SeitenAmplitude Modulation of PSK Project ReportEngr Muhammad Imran100% (2)
- LOW POWER VLSI DESIGN TECHNIQUES AND ANALYSISDokument10 SeitenLOW POWER VLSI DESIGN TECHNIQUES AND ANALYSISluckymanjuNoch keine Bewertungen
- DSP Question Bank PDFDokument4 SeitenDSP Question Bank PDFSarath KumarNoch keine Bewertungen
- Digital Signal ProcessingDokument13 SeitenDigital Signal Processingaloove66Noch keine Bewertungen
- Dspmanual MATLABDokument83 SeitenDspmanual MATLABAbhishek PandeyNoch keine Bewertungen
- SOR Method MATLAB Code for Linear SystemsDokument5 SeitenSOR Method MATLAB Code for Linear SystemsYohannesNoch keine Bewertungen
- Implementation of A Complete GPS Receiver Using SimulinkDokument9 SeitenImplementation of A Complete GPS Receiver Using SimulinkvwnunlaiNoch keine Bewertungen
- PID Control ToolkitDokument6 SeitenPID Control ToolkitRobin PathakNoch keine Bewertungen
- Sallen Key Low Pass FilterDokument4 SeitenSallen Key Low Pass FilterPhilip Caesar EbitNoch keine Bewertungen
- Applications of DSPDokument11 SeitenApplications of DSPRajkeen ChamanshaikhNoch keine Bewertungen
- Patient Monitoring SystemDokument22 SeitenPatient Monitoring SystemK.R.Raguram81% (26)
- Median FilteringDokument30 SeitenMedian FilteringK.R.RaguramNoch keine Bewertungen
- Respiratory SystemDokument11 SeitenRespiratory SystemK.R.RaguramNoch keine Bewertungen
- Measurement of Flow&volume of BloodDokument14 SeitenMeasurement of Flow&volume of BloodK.R.RaguramNoch keine Bewertungen
- Histogram Processing TechniquesDokument13 SeitenHistogram Processing TechniquesK.R.RaguramNoch keine Bewertungen
- Heart Rate MeasurementDokument15 SeitenHeart Rate MeasurementK.R.Raguram100% (1)
- Measurement of Blood PressureDokument21 SeitenMeasurement of Blood PressureK.R.Raguram88% (8)
- Heart SoundsDokument23 SeitenHeart SoundsK.R.RaguramNoch keine Bewertungen
- Temperature MeasurementDokument17 SeitenTemperature MeasurementK.R.RaguramNoch keine Bewertungen
- Measurement of Pulse RateDokument10 SeitenMeasurement of Pulse RateK.R.Raguram100% (1)
- HemodialysisDokument19 SeitenHemodialysisK.R.Raguram88% (26)
- Homomorphic FilteringDokument16 SeitenHomomorphic FilteringK.R.Raguram100% (3)
- Macroshock HazardsDokument14 SeitenMacroshock HazardsK.R.Raguram0% (1)
- Traveling Salesman ProblemDokument24 SeitenTraveling Salesman ProblemK.R.Raguram0% (1)
- Microshock HazardsDokument9 SeitenMicroshock HazardsK.R.Raguram100% (1)
- High Boost FilteringDokument27 SeitenHigh Boost FilteringK.R.Raguram67% (9)
- Embedded Computing PlatformDokument32 SeitenEmbedded Computing PlatformK.R.RaguramNoch keine Bewertungen
- Filtering in The Frequency DomainDokument34 SeitenFiltering in The Frequency DomainK.R.Raguram100% (1)
- Software Development ToolsDokument22 SeitenSoftware Development ToolsK.R.RaguramNoch keine Bewertungen
- Design MethodologiesDokument20 SeitenDesign MethodologiesK.R.RaguramNoch keine Bewertungen
- Image Enhancement TechniquesDokument15 SeitenImage Enhancement TechniquesK.R.RaguramNoch keine Bewertungen
- Histogram Equalization TechniquesDokument18 SeitenHistogram Equalization TechniquesK.R.RaguramNoch keine Bewertungen
- Cpu BusDokument31 SeitenCpu BusK.R.RaguramNoch keine Bewertungen
- VLSI - P Well ProcessDokument15 SeitenVLSI - P Well ProcessK.R.Raguram100% (2)
- VLSI - Latchup Prevention TechniquesDokument14 SeitenVLSI - Latchup Prevention TechniquesK.R.RaguramNoch keine Bewertungen
- VLSI - Carry Lookahead AdderDokument12 SeitenVLSI - Carry Lookahead AdderK.R.RaguramNoch keine Bewertungen
- Digital System Design - Built in SelfTestDokument18 SeitenDigital System Design - Built in SelfTestK.R.RaguramNoch keine Bewertungen
- Samuthrica LakshnaDokument17 SeitenSamuthrica LakshnaK.R.RaguramNoch keine Bewertungen
- Speed Control of 3 Phase Induction MotorDokument10 SeitenSpeed Control of 3 Phase Induction MotorK.R.RaguramNoch keine Bewertungen
- Installing and Registering FSUIPCDokument7 SeitenInstalling and Registering FSUIPCKAPTAN XNoch keine Bewertungen
- Question Paper Code: 31364Dokument3 SeitenQuestion Paper Code: 31364vinovictory8571Noch keine Bewertungen
- Benzon CaseDokument3 SeitenBenzon Casejulieanne07100% (1)
- Bunkering Check List: Yacht InformationDokument3 SeitenBunkering Check List: Yacht InformationMarian VisanNoch keine Bewertungen
- Siemens Documentation - Modeling ComponentsDokument1 SeiteSiemens Documentation - Modeling ComponentsanupNoch keine Bewertungen
- ATOMIC GAMING Technical Tutorial 1 - Drawing Game Statistics From Diversity Multigame StatisticsDokument4 SeitenATOMIC GAMING Technical Tutorial 1 - Drawing Game Statistics From Diversity Multigame StatisticsmiltoncgNoch keine Bewertungen
- ContactsDokument10 SeitenContactsSana Pewekar0% (1)
- 2.8 V6 5V (Aha & Atq)Dokument200 Seiten2.8 V6 5V (Aha & Atq)Vladimir Socin ShakhbazyanNoch keine Bewertungen
- Part I-Final Report On Soil InvestigationDokument16 SeitenPart I-Final Report On Soil InvestigationmangjuhaiNoch keine Bewertungen
- Entrepreneurship Style - MakerDokument1 SeiteEntrepreneurship Style - Makerhemanthreddy33% (3)
- Abra Valley College Vs AquinoDokument1 SeiteAbra Valley College Vs AquinoJoshua Cu SoonNoch keine Bewertungen
- Basic Electrical Design of A PLC Panel (Wiring Diagrams) - EEPDokument6 SeitenBasic Electrical Design of A PLC Panel (Wiring Diagrams) - EEPRobert GalarzaNoch keine Bewertungen
- Academy Broadcasting Services Managerial MapDokument1 SeiteAcademy Broadcasting Services Managerial MapAnthony WinklesonNoch keine Bewertungen
- Module 5Dokument10 SeitenModule 5kero keropiNoch keine Bewertungen
- Analyze Oil Wear DebrisDokument2 SeitenAnalyze Oil Wear Debristhoma111sNoch keine Bewertungen
- Material Properties L2 Slides and NotesDokument41 SeitenMaterial Properties L2 Slides and NotesjohnNoch keine Bewertungen
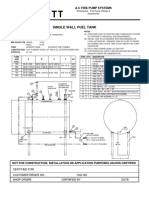
- Single Wall Fuel Tank: FP 2.7 A-C Fire Pump SystemsDokument1 SeiteSingle Wall Fuel Tank: FP 2.7 A-C Fire Pump Systemsricardo cardosoNoch keine Bewertungen
- CCS PDFDokument2 SeitenCCS PDFАндрей НадточийNoch keine Bewertungen
- C 7000Dokument109 SeitenC 7000Alex Argel Roqueme75% (4)
- Ju Complete Face Recovery GAN Unsupervised Joint Face Rotation and De-Occlusion WACV 2022 PaperDokument11 SeitenJu Complete Face Recovery GAN Unsupervised Joint Face Rotation and De-Occlusion WACV 2022 PaperBiponjot KaurNoch keine Bewertungen
- Econ Old Test 2Dokument7 SeitenEcon Old Test 2Homer ViningNoch keine Bewertungen
- Max 761 CsaDokument12 SeitenMax 761 CsabmhoangtmaNoch keine Bewertungen
- Green Management: Nestlé's Approach To Green Management 1. Research and DevelopmentDokument6 SeitenGreen Management: Nestlé's Approach To Green Management 1. Research and DevelopmentAbaidullah TanveerNoch keine Bewertungen
- Programme Report Light The SparkDokument17 SeitenProgramme Report Light The SparkAbhishek Mishra100% (1)
- Hardened Concrete - Methods of Test: Indian StandardDokument16 SeitenHardened Concrete - Methods of Test: Indian StandardjitendraNoch keine Bewertungen
- Overall Dimensions and Mounting: Solar Water Pump Controller Mu - G3 Solar Mu - G5 Solar Mu - G7.5 Solar Mu - G10 SolarDokument2 SeitenOverall Dimensions and Mounting: Solar Water Pump Controller Mu - G3 Solar Mu - G5 Solar Mu - G7.5 Solar Mu - G10 SolarVishak ThebossNoch keine Bewertungen
- FEM Lecture Notes-2Dokument18 SeitenFEM Lecture Notes-2macynthia26Noch keine Bewertungen
- SDNY - Girl Scouts V Boy Scouts ComplaintDokument50 SeitenSDNY - Girl Scouts V Boy Scouts Complaintjan.wolfe5356Noch keine Bewertungen
- Bancassurance Black Book Rahul 777-2Dokument62 SeitenBancassurance Black Book Rahul 777-2Shubham ShahNoch keine Bewertungen
- 04 Dasmarinas Vs Reyes GR No 108229Dokument2 Seiten04 Dasmarinas Vs Reyes GR No 108229Victoria Melissa Cortejos PulidoNoch keine Bewertungen