Das könnte Ihnen auch gefallen
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBewertung: 2 von 5 Sternen2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Motor TheoryDokument22 SeitenMotor TheoryRM HaroonNoch keine Bewertungen
- AC MotorDokument18 SeitenAC MotorCathy IsraelNoch keine Bewertungen
- Presentation of Electric MotorDokument20 SeitenPresentation of Electric MotorRicky Raj100% (2)
- Final Control ElementsDokument76 SeitenFinal Control ElementsUtkarsh ModiNoch keine Bewertungen
- Variable Frequency DrivesDokument23 SeitenVariable Frequency DrivesMadanKarkiNoch keine Bewertungen
- Mott Chapter 21Dokument29 SeitenMott Chapter 21kundayi shavaNoch keine Bewertungen
- Part II - AC MotorsDokument30 SeitenPart II - AC MotorsYan Liang HaoNoch keine Bewertungen
- Electrical Motors EPDI2013Dokument51 SeitenElectrical Motors EPDI2013neocentricgeniusNoch keine Bewertungen
- Motors and Motor StartersDokument32 SeitenMotors and Motor StartersbmshivakumarNoch keine Bewertungen
- Introduction To Electric MotorsDokument121 SeitenIntroduction To Electric MotorsAmged AlbazeliNoch keine Bewertungen
- Unit III (Part I)Dokument10 SeitenUnit III (Part I)YUSRA MERAJNoch keine Bewertungen
- Motors For Mechatronics An IntroductionDokument80 SeitenMotors For Mechatronics An IntroductionJigar M. UpadhyayNoch keine Bewertungen
- EM CH-4-5-6 Ac MachinesDokument80 SeitenEM CH-4-5-6 Ac Machinesmuhammad.anas2007Noch keine Bewertungen
- Types of MotorDokument25 SeitenTypes of MotorClamentNoch keine Bewertungen
- Lecture 7 - Synchronous Generators PDFDokument38 SeitenLecture 7 - Synchronous Generators PDFMd Rodi BidinNoch keine Bewertungen
- Synchronous Machine: Both Air Gap Field and Rotor Rotate at Synchronous Speed Doubly-Excited Machine - Unique FeatureDokument24 SeitenSynchronous Machine: Both Air Gap Field and Rotor Rotate at Synchronous Speed Doubly-Excited Machine - Unique FeatureAstitva PriyadarshiNoch keine Bewertungen
- Principle of Operation: Universal MotorsDokument7 SeitenPrinciple of Operation: Universal MotorsamitbslpawarNoch keine Bewertungen
- Electrical MotorDokument23 SeitenElectrical MotorAnik73% (11)
- Steper MotorsDokument23 SeitenSteper MotorsAbdulrhmanNoch keine Bewertungen
- AC MachinesDokument41 SeitenAC Machineskr_abhijeet72356587Noch keine Bewertungen
- Electric MachineDokument45 SeitenElectric MachineravihbtiNoch keine Bewertungen
- AlernatorDokument47 SeitenAlernatorMayank SrivastavaNoch keine Bewertungen
- AC Electric Machines EditedDokument25 SeitenAC Electric Machines EditedFaizan AhmedNoch keine Bewertungen
- Electrical Machines-I IIIDokument55 SeitenElectrical Machines-I IIIadityassripadaNoch keine Bewertungen
- ENEL280 AC Motor Control LabDokument5 SeitenENEL280 AC Motor Control LabPatrick LustyNoch keine Bewertungen
- Energy Conversion One: Synchronous MotorsDokument21 SeitenEnergy Conversion One: Synchronous MotorsSaurav KafleNoch keine Bewertungen
- Introduction To Electric DrivesDokument75 SeitenIntroduction To Electric DrivesVikas PooniaNoch keine Bewertungen
- Electrical Motor (1) DDokument20 SeitenElectrical Motor (1) Drksamy0102Noch keine Bewertungen
- Unit 4 EAMDokument61 SeitenUnit 4 EAMVivek BendeNoch keine Bewertungen
- Direct Torque Control (DTC) in Induction Motor: M.G.MorshadDokument12 SeitenDirect Torque Control (DTC) in Induction Motor: M.G.MorshadAdil FarzandNoch keine Bewertungen
- Fundamental Gen Sink 2Dokument7 SeitenFundamental Gen Sink 2Sincere AchmadNoch keine Bewertungen
- Induction and Synchronous Motor FundamentalsDokument9 SeitenInduction and Synchronous Motor FundamentalsfitxvNoch keine Bewertungen
- Single Phase Induction MotorDokument25 SeitenSingle Phase Induction MotorKh Muhammad Mashood0% (1)
- Complete Presentation by MUNEEBDokument35 SeitenComplete Presentation by MUNEEBburhankh1Noch keine Bewertungen
- Experiment 2Dokument2 SeitenExperiment 2Anthony John Camacho ReburianoNoch keine Bewertungen
- ميكاترونكسDokument6 SeitenميكاترونكسAhmed M. MuradNoch keine Bewertungen
- Ac Electrical Machines: Provided by Pn. Zuraidah BT Ali Mech. Eng. Dept. PUODokument21 SeitenAc Electrical Machines: Provided by Pn. Zuraidah BT Ali Mech. Eng. Dept. PUOMuhd AkmalNoch keine Bewertungen
- Speed DC MotorDokument35 SeitenSpeed DC MotorDienar Adiose AljahezNoch keine Bewertungen
- Lecture 6 - Induction MotorsDokument34 SeitenLecture 6 - Induction Motorsswamy_satya20004521Noch keine Bewertungen
- Chapter 1-4 - Acdc Generator MotorDokument33 SeitenChapter 1-4 - Acdc Generator Motorruben_robinNoch keine Bewertungen
- Three-Phase Induction Motor: Instructional ObjectivesDokument33 SeitenThree-Phase Induction Motor: Instructional Objectiveskricks92Noch keine Bewertungen
- AlternatorDokument3 SeitenAlternatorshekharpremsureNoch keine Bewertungen
- Unit 3Dokument52 SeitenUnit 3kishorghatage89Noch keine Bewertungen
- Study of Variable Frequency Drives VDokument22 SeitenStudy of Variable Frequency Drives VManjiri PhadnisNoch keine Bewertungen
- Electric Drives System - PGDokument252 SeitenElectric Drives System - PGKrishna SahooNoch keine Bewertungen
- CIA - I Question Bank With Answers SOLID STATE DRIVESDokument4 SeitenCIA - I Question Bank With Answers SOLID STATE DRIVESdeepakraghavanNoch keine Bewertungen
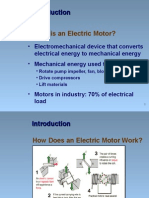
- What Is An Electric Motor?: - Electromechanical Device That Converts - Mechanical Energy Used To E.GDokument37 SeitenWhat Is An Electric Motor?: - Electromechanical Device That Converts - Mechanical Energy Used To E.GRaja RamNoch keine Bewertungen
- DC MotorGeneratorDokument32 SeitenDC MotorGeneratorna zafiraNoch keine Bewertungen
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetVon EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Electrical Machines: Lecture Notes for Electrical Machines CourseVon EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNoch keine Bewertungen
- Study of a reluctance magnetic gearbox for energy storage system applicationVon EverandStudy of a reluctance magnetic gearbox for energy storage system applicationBewertung: 1 von 5 Sternen1/5 (1)
- A New System of Alternating Current Motors and Transformers and Other EssaysVon EverandA New System of Alternating Current Motors and Transformers and Other EssaysBewertung: 5 von 5 Sternen5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Electric Motor Control: DC, AC, and BLDC MotorsVon EverandElectric Motor Control: DC, AC, and BLDC MotorsBewertung: 4.5 von 5 Sternen4.5/5 (19)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorVon EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNoch keine Bewertungen
- DC - Motors TutorialDokument6 SeitenDC - Motors Tutorialozoemena29Noch keine Bewertungen
- Types of Insulation Used On Rotating Machines, Their Insulation Life, and Deterioration CausesDokument14 SeitenTypes of Insulation Used On Rotating Machines, Their Insulation Life, and Deterioration CausessantoshkumarNoch keine Bewertungen
- Electric Fuel Pumps: Product Overview For Universal ApplicationsDokument8 SeitenElectric Fuel Pumps: Product Overview For Universal Applicationscarlos sanchezNoch keine Bewertungen
- AC Machines (AC Motors)Dokument9 SeitenAC Machines (AC Motors)Lloyd SantosNoch keine Bewertungen
- Low-Cost Brushless Pancake Resolver: Sizes 15, 21 and 22Dokument4 SeitenLow-Cost Brushless Pancake Resolver: Sizes 15, 21 and 22visorNoch keine Bewertungen
- Installation & Quick-Start Manual: B550 Series Sensorless Vector Frequency DriveDokument116 SeitenInstallation & Quick-Start Manual: B550 Series Sensorless Vector Frequency DriveWilliam moreNoch keine Bewertungen
- Hyundai N500 ManualDokument76 SeitenHyundai N500 ManualPac CoolNoch keine Bewertungen
- Speed Control of Stepper MotorDokument63 SeitenSpeed Control of Stepper MotorMohammad Ismail Hossain (Sujohn)100% (4)
- Kollmorgen AKM Servomotor Selection Guide PDFDokument74 SeitenKollmorgen AKM Servomotor Selection Guide PDFShailendra BachalNoch keine Bewertungen
- Cable Reel Leroy Somer - enDokument16 SeitenCable Reel Leroy Somer - enEmerson BatistaNoch keine Bewertungen
- P50-11050 ManualDokument46 SeitenP50-11050 Manualj_a_sanNoch keine Bewertungen
- Improved Velocity Estimation For Low-Speed and Transient Regimes Using Low-Resolution EncodersDokument8 SeitenImproved Velocity Estimation For Low-Speed and Transient Regimes Using Low-Resolution EncodersLÊ ĐẠI HIỆPNoch keine Bewertungen
- 4" Box Type Borewell Submersibles (TBRF)Dokument1 Seite4" Box Type Borewell Submersibles (TBRF)reinpolyNoch keine Bewertungen
- 2013 GenCat RGB150Dokument108 Seiten2013 GenCat RGB150malcomNoch keine Bewertungen
- Kabra Extrusion Technik LTD - Revisd Special Offer For KET 382 (SP) 070819Dokument10 SeitenKabra Extrusion Technik LTD - Revisd Special Offer For KET 382 (SP) 070819Freddy FiallosNoch keine Bewertungen
- NP-7502-Electric Motor Predictive and Preventive Maintenance GuideDokument118 SeitenNP-7502-Electric Motor Predictive and Preventive Maintenance Guidedanish87375% (4)
- Regenerative Braking SystemDokument6 SeitenRegenerative Braking SystemVivek SinghNoch keine Bewertungen
- 10 Ishn PPR IjareeieDokument9 Seiten10 Ishn PPR IjareeiePunit GunawatNoch keine Bewertungen
- ABB-Ontrac BrochureDokument16 SeitenABB-Ontrac BrochureAnnie De WildeNoch keine Bewertungen
- DORNA M1 Manual in English - m1.Zh-CN - enDokument147 SeitenDORNA M1 Manual in English - m1.Zh-CN - enJuan Rodriguez CardonaNoch keine Bewertungen
- Basic Electrical EngineeringDokument27 SeitenBasic Electrical Engineeringvamsidar47Noch keine Bewertungen
- Quick Start GuideDokument17 SeitenQuick Start GuideMihaiNeacsuNoch keine Bewertungen
- Chap.4 DC MotorsDokument38 SeitenChap.4 DC Motorsmartazemedu100% (1)
- Otis Globe: Technical TrainingDokument76 SeitenOtis Globe: Technical TrainingSamuel Acevedo100% (4)
- Eee 407 Control Engineering IIDokument39 SeitenEee 407 Control Engineering IIIbrahim Dalafika AbdullahiNoch keine Bewertungen
- Drive Systems For LOESCHE VRM: More Availability at Lower TCODokument5 SeitenDrive Systems For LOESCHE VRM: More Availability at Lower TCOboyka yuriNoch keine Bewertungen
- Ds Pacemaster1-2Dokument6 SeitenDs Pacemaster1-2tuNoch keine Bewertungen
- Design Procedure of A Turbopump Test BenchDokument12 SeitenDesign Procedure of A Turbopump Test Benchjesus_vicente_1Noch keine Bewertungen
- DIY Mini CNC Laser Engraver PDFDokument26 SeitenDIY Mini CNC Laser Engraver PDFIsrael SanchezNoch keine Bewertungen
- Comparison of Early-Stage Design Methods For A Two-Mode Hybrid Electric VehicleDokument6 SeitenComparison of Early-Stage Design Methods For A Two-Mode Hybrid Electric Vehiclejin11004Noch keine Bewertungen