Das könnte Ihnen auch gefallen
- ECE321 Lab3Dokument9 SeitenECE321 Lab3Ha Tran KhiemNoch keine Bewertungen
- PDFDokument24 SeitenPDFOlga Joy Labajo GerastaNoch keine Bewertungen
- Practical Exercise Epipolar GeometryDokument3 SeitenPractical Exercise Epipolar GeometrydansileshiNoch keine Bewertungen
- Flight Direction Cosine MatrixDokument11 SeitenFlight Direction Cosine MatrixsazradNoch keine Bewertungen
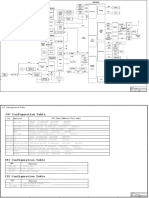
- Esquema Elétrico 2 Moto G6 Plus XT1926-8Dokument46 SeitenEsquema Elétrico 2 Moto G6 Plus XT1926-8Rivail ÁvilaNoch keine Bewertungen
- RC Circuit Transients ExperimentDokument12 SeitenRC Circuit Transients Experimentaguinaga9Noch keine Bewertungen
- MC DX15 - MC DX20Dokument27 SeitenMC DX15 - MC DX20José Antonio Rosa de CamargoNoch keine Bewertungen
- groovyBC PDFDokument13 SeitengroovyBC PDFtoolpostNoch keine Bewertungen
- Lab Manual Electrical Machines Lab PTUKDokument151 SeitenLab Manual Electrical Machines Lab PTUKTareq FoQhaNoch keine Bewertungen
- CAE Bai Thi Mau Anh C1Dokument35 SeitenCAE Bai Thi Mau Anh C1nguyendattdh80% (5)
- Isye 3232 Stochastic Manufacturing & Service Systems Spring 2021 R. D. FoleyDokument6 SeitenIsye 3232 Stochastic Manufacturing & Service Systems Spring 2021 R. D. FoleyJeffry StarNoch keine Bewertungen
- Application Guide P444 PDFDokument222 SeitenApplication Guide P444 PDFSandeep YadavNoch keine Bewertungen
- Assignment 4 - ECE410F Linear Control Systems: Controllability and Stabilization of LTI Systems SolutionsDokument8 SeitenAssignment 4 - ECE410F Linear Control Systems: Controllability and Stabilization of LTI Systems SolutionsIsrael JimenezNoch keine Bewertungen
- Alarmes CTX310 EcoDokument22 SeitenAlarmes CTX310 EcoJoao Stuard Herrera Querevalú67% (6)
- Umat Crystal PlasticityDokument35 SeitenUmat Crystal PlasticityAravind Kumar100% (1)
- Finite Element Method Problems ExplainedDokument7 SeitenFinite Element Method Problems Explainedjustin.enriquez100% (1)
- Digital Signal Processing (QB)Dokument11 SeitenDigital Signal Processing (QB)MATHANKUMAR.SNoch keine Bewertungen
- Computational method for designing wind turbine bladesDokument5 SeitenComputational method for designing wind turbine bladesMaurício SoaresNoch keine Bewertungen
- AFEM Ch09Dokument22 SeitenAFEM Ch09Kim Novis50% (2)
- Crystal Plasticity PDFDokument9 SeitenCrystal Plasticity PDFAlexander BennettNoch keine Bewertungen
- Operation Procedures for Philips/FEI CM-20 TEMDokument11 SeitenOperation Procedures for Philips/FEI CM-20 TEMprasannamuralNoch keine Bewertungen
- Aircraft Flight Dynamics 2015 - 04 - 13 PDFDokument34 SeitenAircraft Flight Dynamics 2015 - 04 - 13 PDFShoeb Ahmed SyedNoch keine Bewertungen
- AITS 2014 CRT III JEEM+JEEA Advanced PAPER 1 Questions PAPERDokument19 SeitenAITS 2014 CRT III JEEM+JEEA Advanced PAPER 1 Questions PAPERlonglostloner889Noch keine Bewertungen
- FEM Higher Order ElementsDokument28 SeitenFEM Higher Order Elementsjoshibec100% (1)
- Tutorial Questions 4523Dokument29 SeitenTutorial Questions 4523Toby Joseph ThomasNoch keine Bewertungen
- 2D Triangular ElementsDokument24 Seiten2D Triangular ElementsAmmir SantosaNoch keine Bewertungen
- Mmecm 102 Computer Aided Process Planning and ControlDokument4 SeitenMmecm 102 Computer Aided Process Planning and ControlRaghu0% (1)
- Study of Process - Improving Efficiency of Closed Die Hot Forging ProcessDokument69 SeitenStudy of Process - Improving Efficiency of Closed Die Hot Forging ProcessMrLanternNoch keine Bewertungen
- IntroMDsimulations WGwebinar 01nov2017Dokument76 SeitenIntroMDsimulations WGwebinar 01nov2017Rizal SinagaNoch keine Bewertungen
- Lecture 15 True Stress Strain HardeningDokument21 SeitenLecture 15 True Stress Strain HardeningJordan KingNoch keine Bewertungen
- 3D Equilibrium PDFDokument3 Seiten3D Equilibrium PDFNoman MumtazNoch keine Bewertungen
- Trolley Parts ListDokument1 SeiteTrolley Parts ListajayNoch keine Bewertungen
- Closed Loop Control For CNC MachinesDokument11 SeitenClosed Loop Control For CNC MachinesMuhammad HaroonNoch keine Bewertungen
- Zarchan-Lecture Kalman Filter9Dokument104 SeitenZarchan-Lecture Kalman Filter9larasmoyoNoch keine Bewertungen
- Aiwa CSD Td10Dokument48 SeitenAiwa CSD Td10Juan Pablo Montoya Cardenas100% (1)
- First Step To Computer Programming With FORTRAN 90Dokument14 SeitenFirst Step To Computer Programming With FORTRAN 90Omed Ghareb100% (2)
- 1kw-Aeolos Specification PDFDokument3 Seiten1kw-Aeolos Specification PDFRaghad A. SanyoraNoch keine Bewertungen
- Aeroelastic GallopingDokument17 SeitenAeroelastic GallopingMalika NavaratnaNoch keine Bewertungen
- Iei Scholarship Application FormDokument4 SeitenIei Scholarship Application FormdsreNoch keine Bewertungen
- Instalar Paquete en StataDokument2 SeitenInstalar Paquete en StatabsjsjsNoch keine Bewertungen
- Theory of Machines Problems Solution ManualDokument5 SeitenTheory of Machines Problems Solution ManualJvNoch keine Bewertungen
- V-750 UV-Vis Double Beam SpectrophotometerDokument38 SeitenV-750 UV-Vis Double Beam Spectrophotometerade muchlasNoch keine Bewertungen
- Aircraft Parameters by Ying HuoDokument10 SeitenAircraft Parameters by Ying HuoMohtashimAliKazmiNoch keine Bewertungen
- 4Dokument5 Seiten4Alsmany ArdabNoch keine Bewertungen
- Sheet 2 ProbDokument2 SeitenSheet 2 ProbazmyzumaNoch keine Bewertungen
- TG-51 Worksheet A: Photon Beam Dosimetry ParametersDokument2 SeitenTG-51 Worksheet A: Photon Beam Dosimetry ParametersLaurentiu RadoiNoch keine Bewertungen
- Design For MachiningDokument43 SeitenDesign For Machiningprof_panneer50% (2)
- EMwavesLectureNotes 1 7Dokument149 SeitenEMwavesLectureNotes 1 7Anonymous BWdaO1lNoch keine Bewertungen
- CS 8100SC Family User GuideDokument56 SeitenCS 8100SC Family User GuideBam BamNoch keine Bewertungen
- CPP MatrixDokument32 SeitenCPP Matrixcommando23Noch keine Bewertungen
- Determine Fiber & Void Fraction of CompositeDokument4 SeitenDetermine Fiber & Void Fraction of Compositeauro auroNoch keine Bewertungen
- Roll No:15011A0411Dokument41 SeitenRoll No:15011A0411ChanjayNoch keine Bewertungen
- Creep TestDokument18 SeitenCreep Testdeemi75Noch keine Bewertungen
- Thermal Analysis of Friction Stir Welded Joint For 304l Stainless Steel Material Using Ansys Mechanical APDLDokument6 SeitenThermal Analysis of Friction Stir Welded Joint For 304l Stainless Steel Material Using Ansys Mechanical APDLMichael SerraNoch keine Bewertungen
- Elastic Strain Energy and Interactions of DislocationsDokument14 SeitenElastic Strain Energy and Interactions of DislocationspritishNoch keine Bewertungen
- Introduction To CPFEM Manual-1Dokument20 SeitenIntroduction To CPFEM Manual-1Nahide TütenNoch keine Bewertungen
- hw1 SolnDokument11 Seitenhw1 SolnDan HuynhNoch keine Bewertungen
- Tarea 5 - Aplicaciones de NewtonDokument25 SeitenTarea 5 - Aplicaciones de NewtonNoelia Geraldine DavilaNoch keine Bewertungen
- Linear Regression: Major: All Engineering Majors Authors: Autar Kaw, Luke SnyderDokument25 SeitenLinear Regression: Major: All Engineering Majors Authors: Autar Kaw, Luke Snydergunawan refiadi100% (1)
- JacobianDokument3 SeitenJacobianAtse Dida Eyes0% (1)
- Vlsi Comple Lab TaskDokument37 SeitenVlsi Comple Lab TaskTausique SheikhNoch keine Bewertungen
- Mg2451 Engineering Economics and Cost Analysis Questions and AnswersDokument11 SeitenMg2451 Engineering Economics and Cost Analysis Questions and AnswersVijayakumarBaskarNoch keine Bewertungen
- Fillet Weld Strength Calculation Example For Welded Connection Subjected To BendingDokument6 SeitenFillet Weld Strength Calculation Example For Welded Connection Subjected To BendingpipestressNoch keine Bewertungen
- Hm150 08EDokument13 SeitenHm150 08EYoni EhmNoch keine Bewertungen
- STEM Education - WedgeDokument10 SeitenSTEM Education - WedgeRokenbokNoch keine Bewertungen
- Paper 5 SpeakingDokument9 SeitenPaper 5 Speakingrobertgoodman37Noch keine Bewertungen
- khối ADCDokument11 Seitenkhối ADCnguyendattdhNoch keine Bewertungen
- PAPER 3 - KEY POINTSDokument9 SeitenPAPER 3 - KEY POINTSMary NathanailNoch keine Bewertungen
- Add inDokument12 SeitenAdd innguyendattdhNoch keine Bewertungen
- Paper ID13Dokument5 SeitenPaper ID13nguyendattdhNoch keine Bewertungen
- Identification Using PSODokument5 SeitenIdentification Using PSOnguyendattdhNoch keine Bewertungen
- Robotarm 3 DofDokument6 SeitenRobotarm 3 DofnguyendattdhNoch keine Bewertungen
- Nhan Dang Mo Hinh MoDokument0 SeitenNhan Dang Mo Hinh MonguyendattdhNoch keine Bewertungen
- Fuzzy Software Cost Estimation Using Particle Swarm OptimizationDokument12 SeitenFuzzy Software Cost Estimation Using Particle Swarm OptimizationnguyendattdhNoch keine Bewertungen
- Perceptron Learning RulesDokument38 SeitenPerceptron Learning RulesVivek Goyal50% (2)
- Settles 2005 - An Introduction To Particle Swarm OptimizationDokument8 SeitenSettles 2005 - An Introduction To Particle Swarm OptimizationegonfishNoch keine Bewertungen
- Tuning of PID Controller of Inverted Pendulum Using Genetic AlgorithmDokument4 SeitenTuning of PID Controller of Inverted Pendulum Using Genetic AlgorithmnguyendattdhNoch keine Bewertungen
- Main Ideas of Writing TopicsDokument10 SeitenMain Ideas of Writing TopicsTuanduy173Noch keine Bewertungen
- Fuzzy Identifier With Exponential Rate of Convergence For Nonlinear Dynamic SystemsDokument9 SeitenFuzzy Identifier With Exponential Rate of Convergence For Nonlinear Dynamic SystemsnguyendattdhNoch keine Bewertungen
- 864500Dokument9 Seiten864500nguyendattdhNoch keine Bewertungen
- David Cabecinhas - ECC 2009 PaperDokument6 SeitenDavid Cabecinhas - ECC 2009 PapernguyendattdhNoch keine Bewertungen
- Robotarm 3 DofDokument6 SeitenRobotarm 3 DofnguyendattdhNoch keine Bewertungen
- Online Genetic-Fuzzy Forward Controller For A Robot Arm: Prof Dr. Abduladeem A. AliDokument14 SeitenOnline Genetic-Fuzzy Forward Controller For A Robot Arm: Prof Dr. Abduladeem A. AlinguyendattdhNoch keine Bewertungen
- Ga 6bac Tu DoDokument13 SeitenGa 6bac Tu DonguyendattdhNoch keine Bewertungen
- Afrooz EbadatDokument2 SeitenAfrooz EbadatnguyendattdhNoch keine Bewertungen
- 17 - ISSN - 1392-1215 - Integral Backstepping For Attitude Tracking of A Quadrotor SystemDokument6 Seiten17 - ISSN - 1392-1215 - Integral Backstepping For Attitude Tracking of A Quadrotor SystemnguyendattdhNoch keine Bewertungen
- 56 421Dokument10 Seiten56 421nguyendattdhNoch keine Bewertungen
- Ele P 59 - 887215557Dokument8 SeitenEle P 59 - 887215557nguyendattdhNoch keine Bewertungen
- Vxskl#Phwxhgxwu Nohe#Phwxhgxwu Kdolfl#Phwxhgxwu: 15th Triennial World Congress, Barcelona, SpainDokument6 SeitenVxskl#Phwxhgxwu Nohe#Phwxhgxwu Kdolfl#Phwxhgxwu: 15th Triennial World Congress, Barcelona, SpainnguyendattdhNoch keine Bewertungen
- Dual Neural Network For Adaptive Sliding Mode Control of Quadrotor Helicopter StabilizationDokument14 SeitenDual Neural Network For Adaptive Sliding Mode Control of Quadrotor Helicopter StabilizationMandy DiazNoch keine Bewertungen
- Geno-Fuzzy P ID Control System For Flexible-Joint Robot Arm: Teranun TangcharoensukDokument4 SeitenGeno-Fuzzy P ID Control System For Flexible-Joint Robot Arm: Teranun TangcharoensuknguyendattdhNoch keine Bewertungen
- The Trajectory Tracking Problem For Quadrotor System: Na Zhang and Qing-He WuDokument6 SeitenThe Trajectory Tracking Problem For Quadrotor System: Na Zhang and Qing-He WunguyendattdhNoch keine Bewertungen
- Lab 1Dokument9 SeitenLab 1Sofiane WesternNoch keine Bewertungen
- PD QuadrotorDokument7 SeitenPD QuadrotornguyendattdhNoch keine Bewertungen
- Complex Number-04 - ExerciseDokument18 SeitenComplex Number-04 - ExerciseRaju Singh100% (1)
- Fast HMM MapMatchingDokument19 SeitenFast HMM MapMatchingMohamed Abderrahim FellaouineNoch keine Bewertungen
- SIEMENS-7SA522 Setting CalculationDokument20 SeitenSIEMENS-7SA522 Setting Calculationnaran19794735Noch keine Bewertungen
- BTR+DR Andrew' S+ruleDokument3 SeitenBTR+DR Andrew' S+ruleSeetha ChimakurthiNoch keine Bewertungen
- LIE - History of ComputerDokument88 SeitenLIE - History of ComputerJustin Acuña DungogNoch keine Bewertungen
- 21 BLOkon - 02 - 1.0 - ManualDokument24 Seiten21 BLOkon - 02 - 1.0 - Manualgetasew altasebNoch keine Bewertungen
- Ar PPDokument63 SeitenAr PPThant ZinNoch keine Bewertungen
- Driver 230 CPL: 3 Zone Weekly Programmer Using Power Line CarriersDokument8 SeitenDriver 230 CPL: 3 Zone Weekly Programmer Using Power Line Carriersbrochures112233Noch keine Bewertungen
- A Computer Is A Machine That Changes Information When ItDokument5 SeitenA Computer Is A Machine That Changes Information When ItJeremy MorganNoch keine Bewertungen
- Computer and Operating SystemsDokument213 SeitenComputer and Operating SystemsDrabrajib Hazarika100% (3)
- Unit 3: History of Electrical EngineeringDokument14 SeitenUnit 3: History of Electrical EngineeringTeodora MandićNoch keine Bewertungen
- 2 COMPLEX NUMBERS PART 2 of 3 PDFDokument14 Seiten2 COMPLEX NUMBERS PART 2 of 3 PDFSinghRajputNoch keine Bewertungen
- Solution To Module 1: Practice Problem Set #1Dokument1 SeiteSolution To Module 1: Practice Problem Set #1ArmandoNoch keine Bewertungen
- Distance Protection Schemes: Network Protection & Automation GuideDokument10 SeitenDistance Protection Schemes: Network Protection & Automation GuideShailesh ChettyNoch keine Bewertungen
- History of Computing HardwareDokument186 SeitenHistory of Computing HardwareAditya Prakash100% (1)
- Tooth Gear SEW Linha SDokument5 SeitenTooth Gear SEW Linha SSolver Manutenção IndustrialNoch keine Bewertungen
- Charles BabbageDokument12 SeitenCharles BabbageRex CulpableNoch keine Bewertungen
- Re Live 09 ProceedingsDokument202 SeitenRe Live 09 ProceedingsNina WenhartNoch keine Bewertungen
- The CRS A255 RobotDokument20 SeitenThe CRS A255 RobotnguyendattdhNoch keine Bewertungen
- MMS 101 - Course Module PDFDokument245 SeitenMMS 101 - Course Module PDFalexiefrancisNoch keine Bewertungen
- Relays Calculations Alstom ArabDokument77 SeitenRelays Calculations Alstom ArabTaufan Bakti PramudyaNoch keine Bewertungen
- Expanded Course Notes on Complex Numbers: An SEO-Optimized TitleDokument60 SeitenExpanded Course Notes on Complex Numbers: An SEO-Optimized TitleKevin QuachNoch keine Bewertungen
- Conjugate RootsDokument3 SeitenConjugate RootsDileep NaraharasettyNoch keine Bewertungen
- Micrologic Instalcion y ProgramacionDokument118 SeitenMicrologic Instalcion y ProgramacionEmanuel DuarteNoch keine Bewertungen
- JGT140-09 Single Motor Corner Rounding StationDokument12 SeitenJGT140-09 Single Motor Corner Rounding StationDarril AfNoch keine Bewertungen
- Complex Number Formulae and ConceptsDokument7 SeitenComplex Number Formulae and ConceptsMuzafar Ali ChannaNoch keine Bewertungen