Das könnte Ihnen auch gefallen
- Sequences and Infinite Series, A Collection of Solved ProblemsVon EverandSequences and Infinite Series, A Collection of Solved ProblemsNoch keine Bewertungen
- AI-Lecture 7 (Constraint Satisfaction Problem)Dokument80 SeitenAI-Lecture 7 (Constraint Satisfaction Problem)Braga Gladys MaeNoch keine Bewertungen
- AI-Lecture 7 (Constraint Satisfaction Problem)Dokument80 SeitenAI-Lecture 7 (Constraint Satisfaction Problem)Braga Gladys MaeNoch keine Bewertungen
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Von EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Bewertung: 2.5 von 5 Sternen2.5/5 (2)
- Constraint Satisfaction ProblemsDokument75 SeitenConstraint Satisfaction Problemsshruti soniNoch keine Bewertungen
- 5 CSPDokument70 Seiten5 CSPGUNEET SURANoch keine Bewertungen
- Constraint Satisfaction Problems: AIMA: Chapter 6Dokument64 SeitenConstraint Satisfaction Problems: AIMA: Chapter 6Sunilkumar ReddyNoch keine Bewertungen
- Problemas de Satisfacción de RestriccionesDokument40 SeitenProblemas de Satisfacción de RestriccionesCamilo IsazaNoch keine Bewertungen
- Constraint Satisfaction ProblemsDokument35 SeitenConstraint Satisfaction ProblemsAhmed Hassan ShahNoch keine Bewertungen
- CSPDokument9 SeitenCSPSrinivas VemuriNoch keine Bewertungen
- Artificial Intelligence: Constraint Satisfaction ProblemsDokument51 SeitenArtificial Intelligence: Constraint Satisfaction Problemssurya kiranNoch keine Bewertungen
- Lecture 5: Constraint Satisfaction Problem (CSP) : Heshaam Faili Hfaili@ut - Ac.ir University of TehranDokument47 SeitenLecture 5: Constraint Satisfaction Problem (CSP) : Heshaam Faili Hfaili@ut - Ac.ir University of Tehrantrilok4391Noch keine Bewertungen
- Lec07 ConstraintsatisfactionDokument46 SeitenLec07 ConstraintsatisfactionMD AminNoch keine Bewertungen
- Cse-3201 (Ai - 08) PDFDokument38 SeitenCse-3201 (Ai - 08) PDFmna shourovNoch keine Bewertungen
- Module-3 Chapter 2Dokument39 SeitenModule-3 Chapter 2IM AM INEVITABLENoch keine Bewertungen
- Constraint Satisfaction ProblemDokument43 SeitenConstraint Satisfaction ProblemLucky Asr AwaisNoch keine Bewertungen
- Ai 5Dokument61 SeitenAi 5Muhammad Sadiq Khan NasarNoch keine Bewertungen
- Constraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Dokument55 SeitenConstraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Gomathi ShanmugamNoch keine Bewertungen
- Unit 3 CSPDokument32 SeitenUnit 3 CSPSharanya EmmadisettyNoch keine Bewertungen
- Constraint SatDokument57 SeitenConstraint SatJetlin C PNoch keine Bewertungen
- A General Introduction To Artificial IntelligenceDokument58 SeitenA General Introduction To Artificial IntelligenceÁnh PhạmNoch keine Bewertungen
- AI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningDokument11 SeitenAI For DS - Theory CSP, Wumpus World and Probabilistic ReasoningSaranya NarayanasettiNoch keine Bewertungen
- Constraint Satisfaction Problems: Soup Chicken Dish AppetizerDokument45 SeitenConstraint Satisfaction Problems: Soup Chicken Dish AppetizerAyush SethiNoch keine Bewertungen
- Experiment 6 AIM: - Theory: - : Constraint Satisfaction ProblemDokument4 SeitenExperiment 6 AIM: - Theory: - : Constraint Satisfaction ProblemVarun VoraNoch keine Bewertungen
- AI-Lecture 7 (Constraint Satisfaction Problems)Dokument60 SeitenAI-Lecture 7 (Constraint Satisfaction Problems)Yna ForondaNoch keine Bewertungen
- Constraint Satisfaction Problems (CSP)Dokument36 SeitenConstraint Satisfaction Problems (CSP)ShamsNoch keine Bewertungen
- Constraint Satisfaction Problems: Unit 3Dokument28 SeitenConstraint Satisfaction Problems: Unit 3youtube channelNoch keine Bewertungen
- Daa Module 6Dokument17 SeitenDaa Module 6dunduNoch keine Bewertungen
- Chapter 6 - CSPs - Part - 1Dokument40 SeitenChapter 6 - CSPs - Part - 1Osama Al AsoouliNoch keine Bewertungen
- 05 CSPDokument28 Seiten05 CSPNada ElokabyNoch keine Bewertungen
- ECOM 6302: Engineering Optimization: Chapter ThreeDokument56 SeitenECOM 6302: Engineering Optimization: Chapter Threeaaqlain100% (1)
- Constraint Satisfaction ProblemDokument10 SeitenConstraint Satisfaction ProblemSwapniltrinityNoch keine Bewertungen
- Algo Prev Year Solution 2019 and 2018Dokument23 SeitenAlgo Prev Year Solution 2019 and 2018Md. Abdur RoufNoch keine Bewertungen
- Constraint Satisfaction ProblemsDokument10 SeitenConstraint Satisfaction Problemsshikhar jainNoch keine Bewertungen
- Unit IiDokument79 SeitenUnit IiThiriveedhi SubbarayuduNoch keine Bewertungen
- Constraint Satisfaction ProblemDokument9 SeitenConstraint Satisfaction ProblemswapsjagNoch keine Bewertungen
- Constraint Satisfaction Problems: Section 1 - 3Dokument44 SeitenConstraint Satisfaction Problems: Section 1 - 3Tariq IqbalNoch keine Bewertungen
- Ai Assgnmt FinalDokument13 SeitenAi Assgnmt FinalWondu GashahunNoch keine Bewertungen
- 2014wq171 08 ConstraintSatisfactionDokument106 Seiten2014wq171 08 ConstraintSatisfactionTrương Thuận KiệtNoch keine Bewertungen
- Topic 05 - CSPDokument110 SeitenTopic 05 - CSPMohammed AlbazzazNoch keine Bewertungen
- BacktrackingDokument35 SeitenBacktrackingD07Vaishnavi ShindeCENoch keine Bewertungen
- Artificial Intelligence CS-3431w (V2)Dokument23 SeitenArtificial Intelligence CS-3431w (V2)Nisha IdreesNoch keine Bewertungen
- AP Exam Review Calc BC Sem2Dokument13 SeitenAP Exam Review Calc BC Sem2Mark KimNoch keine Bewertungen
- Ai Assgnmt FinalDokument13 SeitenAi Assgnmt FinalWondu GashahunNoch keine Bewertungen
- Cs188 Fall 2018 Section 2: Graph Search + CspsDokument5 SeitenCs188 Fall 2018 Section 2: Graph Search + CspsLe Chanh Thanh TinNoch keine Bewertungen
- NewDokument32 SeitenNewAbhishek SrivastavaNoch keine Bewertungen
- Constraint Programming: Toby Walsh Unsw and NictaDokument62 SeitenConstraint Programming: Toby Walsh Unsw and Nictakyle_namgal1679Noch keine Bewertungen
- MakalahDokument4 SeitenMakalahAde A. HidayatNoch keine Bewertungen
- Daa 4.0 DP PDFDokument50 SeitenDaa 4.0 DP PDFAbdus SadikNoch keine Bewertungen
- C Se 150 Assignment 3Dokument5 SeitenC Se 150 Assignment 3VinhTranNoch keine Bewertungen
- © 2015 by Greg Ozbirn, UT-Dallas, For Use With Data Structures Book by Mark Allen Weiss 1 Spring 2015Dokument42 Seiten© 2015 by Greg Ozbirn, UT-Dallas, For Use With Data Structures Book by Mark Allen Weiss 1 Spring 2015MariaLuzNoch keine Bewertungen
- M 1. S 8 or S 9. Etc. (Derive More!)Dokument5 SeitenM 1. S 8 or S 9. Etc. (Derive More!)Eloy VegaNoch keine Bewertungen
- Nonlinear Programming UnconstrainedDokument182 SeitenNonlinear Programming UnconstrainedkeerthanavijayaNoch keine Bewertungen
- Unit Iii: Backtracking Branch-And-BoundDokument47 SeitenUnit Iii: Backtracking Branch-And-BoundChaitanya NirfarakeNoch keine Bewertungen
- m5 CSPDokument34 Seitenm5 CSPanushanallagasu851Noch keine Bewertungen
- 21 Notes PDFDokument11 Seiten21 Notes PDFSoumith Kumar DachepalliNoch keine Bewertungen
- Constraint Satisfaction Problems: Dr. Shahnawaz QureshiDokument44 SeitenConstraint Satisfaction Problems: Dr. Shahnawaz QureshiSami AhmedNoch keine Bewertungen
- Overton TalkDokument41 SeitenOverton Talkluka alexNoch keine Bewertungen
- Lecture 2Dokument30 SeitenLecture 2khaddamoazNoch keine Bewertungen
- SWC12Dokument11 SeitenSWC12vikkasNoch keine Bewertungen
- Ec8071 Cognitive Radio: Diploma, Anna Univ UG & PG CoursesDokument2 SeitenEc8071 Cognitive Radio: Diploma, Anna Univ UG & PG CoursesBALAKRISHNANNoch keine Bewertungen
- Introduction To Vlsi Circuits and Systems John P UyemuraDokument1 SeiteIntroduction To Vlsi Circuits and Systems John P UyemuramgowtaamNoch keine Bewertungen
- How To Get Unlimited Time in Internet Café's PDFDokument1 SeiteHow To Get Unlimited Time in Internet Café's PDFbkchoudhury1993Noch keine Bewertungen
- Welcome To The Next Lecture On Design For Modularity. (Refer Slide Time: 00:18)Dokument19 SeitenWelcome To The Next Lecture On Design For Modularity. (Refer Slide Time: 00:18)SURESH SNoch keine Bewertungen
- CAD CAM Question BankDokument2 SeitenCAD CAM Question BankrsdeshmukhNoch keine Bewertungen
- αξεσουαρ SKODA CITIGO SPORTDokument7 Seitenαξεσουαρ SKODA CITIGO SPORTSkoda Club PeloponnhsouNoch keine Bewertungen
- Installation of A PCS7 Project 1Dokument115 SeitenInstallation of A PCS7 Project 1Mohammad HaiderNoch keine Bewertungen
- Internet of Things 2Dokument11 SeitenInternet of Things 2Chithra NachiappanNoch keine Bewertungen
- PHP BitsDokument24 SeitenPHP BitskarunakarNoch keine Bewertungen
- Hyperion EssbaseDokument16 SeitenHyperion Essbaseguru_rcpNoch keine Bewertungen
- FitTrack BloodLinkDokument7 SeitenFitTrack BloodLinkInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Desain Layout Mobil Toko Laundry SepatuDokument7 SeitenDesain Layout Mobil Toko Laundry SepatuKlinikrifdaNoch keine Bewertungen
- Hci RCHSD Capstone PresentationDokument2 SeitenHci RCHSD Capstone Presentationapi-583841034Noch keine Bewertungen
- Mastery TestDokument5 SeitenMastery TestjessicachancoNoch keine Bewertungen
- Configuring SNMP On ProteusDokument12 SeitenConfiguring SNMP On ProteusAijaz MirzaNoch keine Bewertungen
- AvPvT CCG CardlistDokument5 SeitenAvPvT CCG CardlistDavid de VisserNoch keine Bewertungen
- Social Dimensions of ComputerisationDokument6 SeitenSocial Dimensions of Computerisationgourav rathore100% (1)
- Manual Cheetah XIDokument158 SeitenManual Cheetah XIart159357100% (3)
- SAP MM-Step by Step Configuration of Split ValuationDokument18 SeitenSAP MM-Step by Step Configuration of Split Valuationjemss emailNoch keine Bewertungen
- Comparison of Voltage Control Methods in Distribution Systems Using Q-V Based PI and Droop Controls of Solar InvertersDokument5 SeitenComparison of Voltage Control Methods in Distribution Systems Using Q-V Based PI and Droop Controls of Solar Invertersmirko.tNoch keine Bewertungen
- Captive Portal Troubleshooting - Basic SlidesDokument19 SeitenCaptive Portal Troubleshooting - Basic SlidesEdson MouraNoch keine Bewertungen
- 01 - Cisco ISE Profiling Reporting - Part 1Dokument1 Seite01 - Cisco ISE Profiling Reporting - Part 1Nguyen LeNoch keine Bewertungen
- Contoh ProposalDokument42 SeitenContoh Proposalarifin usman MursanNoch keine Bewertungen
- QuestionDokument6 SeitenQuestionVj Sudhan100% (3)
- Assignment 2dbmsDokument13 SeitenAssignment 2dbmsTXACORPNoch keine Bewertungen
- Obsolete Product: Descriptio FeaturesDokument8 SeitenObsolete Product: Descriptio FeaturesMaria Das Dores RodriguesNoch keine Bewertungen
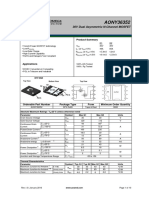
- AONY36352: 30V Dual Asymmetric N-Channel MOSFETDokument10 SeitenAONY36352: 30V Dual Asymmetric N-Channel MOSFETrobertjavi1983Noch keine Bewertungen
- Renub Research: Published: May, 2012Dokument12 SeitenRenub Research: Published: May, 2012api-114525849Noch keine Bewertungen
- Wagner WM-4 Loader Installation and Operation InstructionsDokument0 SeitenWagner WM-4 Loader Installation and Operation Instructionslulu3232Noch keine Bewertungen
- The Game: Penetrating the Secret Society of Pickup ArtistsVon EverandThe Game: Penetrating the Secret Society of Pickup ArtistsBewertung: 4 von 5 Sternen4/5 (131)
- Aruba, Bonaire & Curacao Adventure GuideVon EverandAruba, Bonaire & Curacao Adventure GuideBewertung: 5 von 5 Sternen5/5 (2)
- Secrets of the Millionaire Mind: Mastering the Inner Game of WealthVon EverandSecrets of the Millionaire Mind: Mastering the Inner Game of WealthBewertung: 4.5 von 5 Sternen4.5/5 (197)
- Proof of Heaven: A Neurosurgeon's Journey into the AfterlifeVon EverandProof of Heaven: A Neurosurgeon's Journey into the AfterlifeBewertung: 3.5 von 5 Sternen3.5/5 (165)
- New Zealand Adventure Travel GuideVon EverandNew Zealand Adventure Travel GuideBewertung: 4.5 von 5 Sternen4.5/5 (14)
- Coastal Alaska & the Inside Passage Adventure Travel GuideVon EverandCoastal Alaska & the Inside Passage Adventure Travel GuideNoch keine Bewertungen
- Geneva, Lausanne, Fribourg & Western Switzerland Travel AdventuresVon EverandGeneva, Lausanne, Fribourg & Western Switzerland Travel AdventuresNoch keine Bewertungen
- Hollywood & the Best of Los Angeles Travel GuideVon EverandHollywood & the Best of Los Angeles Travel GuideBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Jamaica: A Guide to the Food & RestaurantsVon EverandJamaica: A Guide to the Food & RestaurantsBewertung: 4 von 5 Sternen4/5 (1)