Das könnte Ihnen auch gefallen
- Optical Fiber Communication by Gerd Keiser, 3rd EdDokument622 SeitenOptical Fiber Communication by Gerd Keiser, 3rd EdNgoc Phuc Le100% (3)
- Problems in Laser PhysicsDokument323 SeitenProblems in Laser PhysicsVastavikta Singh50% (2)
- Motor 2Dokument49 SeitenMotor 2api-247714257Noch keine Bewertungen
- Ac Servo MotorDokument14 SeitenAc Servo MotorJeyanthNoch keine Bewertungen
- Experiment No: 1: Aim: Apparatus RequiredDokument29 SeitenExperiment No: 1: Aim: Apparatus RequiredKarthi RamachandranNoch keine Bewertungen
- DC Motor TutorialDokument23 SeitenDC Motor TutorialRaghavan23Noch keine Bewertungen
- Switched Reluctance Reluctance Motors and ControlDokument47 SeitenSwitched Reluctance Reluctance Motors and ControlSreerag Kunnathu Sugathan100% (1)
- What The Drive Does ?Dokument22 SeitenWhat The Drive Does ?Divyansh PariharNoch keine Bewertungen
- Brushless DC MotorDokument24 SeitenBrushless DC MotorNadeeka PereraNoch keine Bewertungen
- DC MotorsDokument58 SeitenDC MotorsSuhanNoch keine Bewertungen
- Control Theory 31 PDFDokument44 SeitenControl Theory 31 PDFAmit TiwaryNoch keine Bewertungen
- Assignment: Topic:-MODULE-VI Control System Components andDokument61 SeitenAssignment: Topic:-MODULE-VI Control System Components andAmit TiwaryNoch keine Bewertungen
- ServomotorsDokument17 SeitenServomotorsVi GaneshNoch keine Bewertungen
- Mesin SinkronDokument52 SeitenMesin SinkronMuhammad Sulthon Novera RegaNoch keine Bewertungen
- Control System Lab EE-324-FDokument45 SeitenControl System Lab EE-324-FDheeraj KumarNoch keine Bewertungen
- Eceg-5401 2Dokument37 SeitenEceg-5401 2Kide Bay0% (1)
- Electrical Machines-I IIIDokument55 SeitenElectrical Machines-I IIIadityassripadaNoch keine Bewertungen
- DC Lecture NotesDokument30 SeitenDC Lecture NotesTI IgnitorsNoch keine Bewertungen
- Final Control ElementsDokument76 SeitenFinal Control ElementsUtkarsh ModiNoch keine Bewertungen
- Chopper DriveDokument66 SeitenChopper Drivemazza23450% (2)
- SmotorDokument20 SeitenSmotorAamer MohammedNoch keine Bewertungen
- Power Electronics and Drives 2019-20 C PDFDokument58 SeitenPower Electronics and Drives 2019-20 C PDFSwati JadhavNoch keine Bewertungen
- Unit 4 - Three-Phase Induction MotorsDokument93 SeitenUnit 4 - Three-Phase Induction MotorsMaribe TshegoNoch keine Bewertungen
- Ac Position Control Trainer ManualDokument7 SeitenAc Position Control Trainer ManualSHANKARNoch keine Bewertungen
- Stepper Motors: by Naveenkumar R 1 M.Tech N.I.T.K SurathkalDokument26 SeitenStepper Motors: by Naveenkumar R 1 M.Tech N.I.T.K SurathkalNaveen Kumar0% (1)
- Chapter 1 DC Drives Part1Dokument46 SeitenChapter 1 DC Drives Part1Mohammad MunzirNoch keine Bewertungen
- DCMotorDrives Lecture1&2Dokument30 SeitenDCMotorDrives Lecture1&2Raghu VaranNoch keine Bewertungen
- Servo MotorDokument21 SeitenServo MotoribrahimNoch keine Bewertungen
- Permanent Magnet Brushless DC MotorDokument18 SeitenPermanent Magnet Brushless DC MotorBala SubramanianNoch keine Bewertungen
- Assignment: Topic:-MODULE-VI Control System Components andDokument61 SeitenAssignment: Topic:-MODULE-VI Control System Components andAmit TiwaryNoch keine Bewertungen
- Servo MotorDokument21 SeitenServo MotorsafvanshaikhNoch keine Bewertungen
- Experiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsDokument6 SeitenExperiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsdeepakNoch keine Bewertungen
- Welcome: Electrical Machines Testing DepartmentDokument58 SeitenWelcome: Electrical Machines Testing DepartmentMani KandanNoch keine Bewertungen
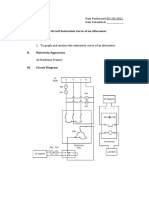
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDokument4 SeitenOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNoch keine Bewertungen
- Phase Sequence Indicator, TECHOMETERDokument17 SeitenPhase Sequence Indicator, TECHOMETERGAURAV BHARADWAJNoch keine Bewertungen
- Machine Manual PDFDokument35 SeitenMachine Manual PDFh1169104Noch keine Bewertungen
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDokument6 SeitenExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNoch keine Bewertungen
- Servomotor PptsDokument26 SeitenServomotor Pptsjasdeep_kour236066Noch keine Bewertungen
- Eee206 DC Motor p1bDokument3 SeitenEee206 DC Motor p1bAhad AhadNoch keine Bewertungen
- Beee NotesDokument13 SeitenBeee NoteserwsezNoch keine Bewertungen
- Control System Lab ManualDokument52 SeitenControl System Lab ManualMohammad Umar RehmanNoch keine Bewertungen
- Electrical Actuation SystemsDokument54 SeitenElectrical Actuation Systemsprashant_cool_4_uNoch keine Bewertungen
- Power Generator For MT-8BDokument60 SeitenPower Generator For MT-8BTyan ScreamouscoreNoch keine Bewertungen
- DCmotortutorial (DC, STEPPER, RC SERVO, SOLINOID)Dokument23 SeitenDCmotortutorial (DC, STEPPER, RC SERVO, SOLINOID)Visite LakhsassNoch keine Bewertungen
- DECE Lab IeDokument7 SeitenDECE Lab IemurthyNoch keine Bewertungen
- Electric Utility Solutions: Voltage RegulationDokument88 SeitenElectric Utility Solutions: Voltage RegulationMilsoft Utility Solutions50% (2)
- DC MotorsDokument39 SeitenDC Motorsapi-3827132100% (11)
- DC Motor DrivesDokument53 SeitenDC Motor DrivesManoj NNoch keine Bewertungen
- Unit 2: Electrical Actuation SystemsDokument47 SeitenUnit 2: Electrical Actuation SystemsHariprasadNoch keine Bewertungen
- DC Motor Drives 2007Dokument48 SeitenDC Motor Drives 2007stubborn002Noch keine Bewertungen
- Lecture-16-Direct Torque Control PDFDokument33 SeitenLecture-16-Direct Torque Control PDFKriban Govender100% (1)
- FTF Aut f0234Dokument38 SeitenFTF Aut f0234vishiwizardNoch keine Bewertungen
- PROJCTDokument32 SeitenPROJCTSwati Agarwal100% (1)
- ED Write UpdocumentDokument12 SeitenED Write UpdocumentMeenakshi ChaudhariNoch keine Bewertungen
- DC Shunt MotorDokument9 SeitenDC Shunt MotorPeterNoch keine Bewertungen
- Brushless DC MotorDokument19 SeitenBrushless DC MotorSanjeet KumarNoch keine Bewertungen
- Robot Actuators and Feedback Components (Main7)Dokument82 SeitenRobot Actuators and Feedback Components (Main7)tarasasanka33% (6)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Von EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Noch keine Bewertungen
- NCP1835 DatasheetDokument16 SeitenNCP1835 Datasheetmartinch buggsyNoch keine Bewertungen
- Trigger CircuitDokument9 SeitenTrigger CircuitMouliNoch keine Bewertungen
- Electric Traction SystemDokument42 SeitenElectric Traction SystemBabu YadavNoch keine Bewertungen
- MOSFETDokument23 SeitenMOSFETRahulKushwahaNoch keine Bewertungen
- MOS Logic FamilyDokument35 SeitenMOS Logic Familyvinayak mastaNoch keine Bewertungen
- ABB ACS800 37 Manual PDFDokument250 SeitenABB ACS800 37 Manual PDFAnonymous 6IqOdxNoch keine Bewertungen
- Part List 1395-6.0Dokument19 SeitenPart List 1395-6.0Gerardo Prada YepesNoch keine Bewertungen
- ACS1000 Product Brochure Low-Res RevIDokument28 SeitenACS1000 Product Brochure Low-Res RevISergio Fuentealba FuenzalidaNoch keine Bewertungen
- Ferro ResonanceDokument99 SeitenFerro Resonancevthiyagain100% (1)
- HCF4060B 14-Stage Ripple Carry Binary Counter/divider and OscillatorDokument9 SeitenHCF4060B 14-Stage Ripple Carry Binary Counter/divider and OscillatorSherif EltoukhiNoch keine Bewertungen
- LWNMNM : General Description FeaturesDokument16 SeitenLWNMNM : General Description FeaturesSergio BarbozaNoch keine Bewertungen
- The Role of Fuse in Low Voltage SystemsDokument5 SeitenThe Role of Fuse in Low Voltage Systemsjob_pNoch keine Bewertungen
- At5iont-I Dram QVLDokument2 SeitenAt5iont-I Dram QVLbeursspeculaasjeNoch keine Bewertungen
- DC To DC Converter Circuits Using SG3524 (Buck, Boost Designs)Dokument5 SeitenDC To DC Converter Circuits Using SG3524 (Buck, Boost Designs)Branislav TanevskiNoch keine Bewertungen
- Chapter 1 ProbabilityDokument38 SeitenChapter 1 ProbabilityAmina TahreenNoch keine Bewertungen
- Mean Well SD-100 SeriesDokument2 SeitenMean Well SD-100 Seriescrash2804Noch keine Bewertungen
- Double Data Rate I/O (ALTDDIO - IN, ALTDDIO - OUT, and ALTDDIO - BIDIR) IP Cores User GuideDokument22 SeitenDouble Data Rate I/O (ALTDDIO - IN, ALTDDIO - OUT, and ALTDDIO - BIDIR) IP Cores User Guidesantanu_sinha87Noch keine Bewertungen
- Sn7414 Schmitt TriggerDokument13 SeitenSn7414 Schmitt TriggerFaazil FairoozNoch keine Bewertungen
- Fourier Series Are Helpful Tools For Analyzing Electronic Circuits.Dokument14 SeitenFourier Series Are Helpful Tools For Analyzing Electronic Circuits.hamza abdo mohamoudNoch keine Bewertungen
- DC-DC ConvertersDokument30 SeitenDC-DC ConvertersTema HassanNoch keine Bewertungen
- 171 CatalogDokument156 Seiten171 Catalogchente_b100% (1)
- Weinshel Attenuators PDFDokument54 SeitenWeinshel Attenuators PDFengineer_3Noch keine Bewertungen
- Logic Families MCQs SimpleDokument8 SeitenLogic Families MCQs SimplebijukumargNoch keine Bewertungen
- Revision of The CBEMA CurveDokument39 SeitenRevision of The CBEMA Curveyasir_639Noch keine Bewertungen
- Pu Assignment 1Dokument2 SeitenPu Assignment 1jasonNoch keine Bewertungen
- AC Dimmer: Components RequiredDokument8 SeitenAC Dimmer: Components Requiredovais123Noch keine Bewertungen
- Frequency Division Using Flip-FlopsDokument4 SeitenFrequency Division Using Flip-FlopsBapanapalli Tejeshwar100% (1)
- 3409Dokument5 Seiten3409Sohail AhmadNoch keine Bewertungen