Das könnte Ihnen auch gefallen
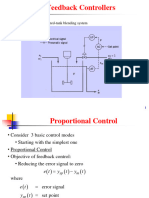
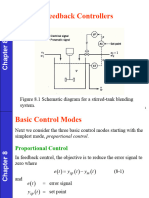
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDokument42 SeitenFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemJoy RoyNoch keine Bewertungen
- Combinatorial Algorithms: For Computers and CalculatorsVon EverandCombinatorial Algorithms: For Computers and CalculatorsBewertung: 4 von 5 Sternen4/5 (2)
- ControllersDokument32 SeitenControllersEric KamauNoch keine Bewertungen
- Feedback Controllers: Proportional ControlDokument14 SeitenFeedback Controllers: Proportional Control李承家Noch keine Bewertungen
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Von EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Noch keine Bewertungen
- PDC Chapter 8Dokument49 SeitenPDC Chapter 8satya sagarNoch keine Bewertungen
- Microelectronic Systems N2 Checkbook: The Checkbook SeriesVon EverandMicroelectronic Systems N2 Checkbook: The Checkbook SeriesNoch keine Bewertungen
- ERT 321 Process Control & Dynamics: Feedback ControllersDokument34 SeitenERT 321 Process Control & Dynamics: Feedback Controllershakita86Noch keine Bewertungen
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationVon EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNoch keine Bewertungen
- Chapter 8 - Feedback ControllerDokument35 SeitenChapter 8 - Feedback ControllerFakhrulShahrilEzanieNoch keine Bewertungen
- Week 9Dokument21 SeitenWeek 9candan.erkenNoch keine Bewertungen
- Week 2Dokument13 SeitenWeek 2Abdinasir AliNoch keine Bewertungen
- Controller PrincipleDokument24 SeitenController PrinciplePortia ShilengeNoch keine Bewertungen
- Process Dynamics and Control: Chapter 8 LecturesDokument33 SeitenProcess Dynamics and Control: Chapter 8 LecturesMuhaiminul IslamNoch keine Bewertungen
- Feedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemDokument24 SeitenFeedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemRama ChilpuriNoch keine Bewertungen
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDokument18 SeitenFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending Systeml7aniNoch keine Bewertungen
- Digital PID Control Algorithm: Hesheng Wang Department of Automation, SJTU 2016,03Dokument17 SeitenDigital PID Control Algorithm: Hesheng Wang Department of Automation, SJTU 2016,03tony riannNoch keine Bewertungen
- Feedback Controller: Proportional, Integral, Derivative (PID)Dokument34 SeitenFeedback Controller: Proportional, Integral, Derivative (PID)Ereen100% (1)
- Week 10-Feedback ControlDokument34 SeitenWeek 10-Feedback ControlMohd Aizad100% (1)
- Position Form & Velocity Form of PID ControllerDokument6 SeitenPosition Form & Velocity Form of PID ControllerThefairman UnkownNoch keine Bewertungen
- Pic FBDokument65 SeitenPic FBSamaid AbdullahNoch keine Bewertungen
- Chapter 6 PID ControlDokument56 SeitenChapter 6 PID ControlHana Muhammad100% (1)
- 20 THDokument28 Seiten20 THujjwal kumarNoch keine Bewertungen
- Process Control CHP5Dokument29 SeitenProcess Control CHP5Martha AlbaNoch keine Bewertungen
- Intech-Pid Control Theory PDFDokument17 SeitenIntech-Pid Control Theory PDFRahim Ali QamarNoch keine Bewertungen
- PID Intech-Pid Control Theory PDFDokument18 SeitenPID Intech-Pid Control Theory PDFDragoș TomaNoch keine Bewertungen
- Control SystemDokument48 SeitenControl SystemOlawale John AdeotiNoch keine Bewertungen
- Unit 3Dokument67 SeitenUnit 3Raghul T100% (1)
- Task2 1 Specific Training-EnDokument35 SeitenTask2 1 Specific Training-EnSantiago LarrazNoch keine Bewertungen
- Feedback Control PID Control: HadiyantoDokument64 SeitenFeedback Control PID Control: HadiyantoNuzul RamadhaniNoch keine Bewertungen
- Experiment 10Dokument2 SeitenExperiment 10kalidindi chandrasekharNoch keine Bewertungen
- 4 Transfer FunctionDokument22 Seiten4 Transfer FunctionSalihin FhooziNoch keine Bewertungen
- Experiment: ObjectiveDokument3 SeitenExperiment: ObjectiveVivek PatelNoch keine Bewertungen
- Classic Control and Compensators.-: Ut Et T Et DT + T Det DTDokument19 SeitenClassic Control and Compensators.-: Ut Et T Et DT + T Det DTEdnna LpNoch keine Bewertungen
- Real-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using LabviewDokument6 SeitenReal-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using Labviewvikalp guptaNoch keine Bewertungen
- Online Control Lecture #1Dokument47 SeitenOnline Control Lecture #1Noor GamingNoch keine Bewertungen
- Teknik Kendali Digital PDFDokument230 SeitenTeknik Kendali Digital PDFWahyu Juliarto100% (3)
- Control L2aDokument17 SeitenControl L2avibhore mendirattaNoch keine Bewertungen
- Process Dynamics and Control: BITS PilaniDokument30 SeitenProcess Dynamics and Control: BITS PilaniShubham ChoudharyNoch keine Bewertungen
- Control ActionDokument11 SeitenControl ActionfaizNoch keine Bewertungen
- Introduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanDokument32 SeitenIntroduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwandaswkNoch keine Bewertungen
- Pid Control ch8 PDFDokument22 SeitenPid Control ch8 PDFGholamreza IlkhaniNoch keine Bewertungen
- PID ControlDokument56 SeitenPID ControlSyafRizal100% (1)
- Week 12 - Control SystemDokument30 SeitenWeek 12 - Control SystemAzizan Anuar100% (1)
- Proportional-Integral-Derivative (PID) Control Method. This Type of Controller IsDokument6 SeitenProportional-Integral-Derivative (PID) Control Method. This Type of Controller IsArabang RaditapoleNoch keine Bewertungen
- 2.2 - Mathematical Modeling & Transfer Function PDFDokument25 Seiten2.2 - Mathematical Modeling & Transfer Function PDFFatinnnnnn100% (1)
- Lecture 1011 TeamDokument70 SeitenLecture 1011 TeamAmitav BaruaNoch keine Bewertungen
- Proportional Integral Derivative PID ControlsDokument13 SeitenProportional Integral Derivative PID Controlsapi-376515075% (4)
- Modelling, Feedback Control Design and Simulation of An Industrial ApplicationDokument21 SeitenModelling, Feedback Control Design and Simulation of An Industrial ApplicationjttatsumiNoch keine Bewertungen
- 15.el Algoritmo de Control PIDDokument44 Seiten15.el Algoritmo de Control PIDYulieth BravoNoch keine Bewertungen
- Block Diagram Representation: Loop or A Closed-Loop SystemDokument63 SeitenBlock Diagram Representation: Loop or A Closed-Loop SystemaliNoch keine Bewertungen
- 2 Automatic ControllersDokument26 Seiten2 Automatic ControllersCupa no DensetsuNoch keine Bewertungen
- Zieglar Nichols MethodDokument7 SeitenZieglar Nichols MethodVinay RajeshNoch keine Bewertungen
- Lab 7 Pid ControlDokument6 SeitenLab 7 Pid ControlFatin FarehahNoch keine Bewertungen
- Unit IV - Design of Compensators: B.E., EEE, Semester 4, AY 2023-2024Dokument11 SeitenUnit IV - Design of Compensators: B.E., EEE, Semester 4, AY 2023-2024Dr. C. V.Noch keine Bewertungen
- Chap 08 Marlin 2002Dokument37 SeitenChap 08 Marlin 2002Audrey Patrick KallaNoch keine Bewertungen
- Chap07 PDFDokument77 SeitenChap07 PDFantavenaNoch keine Bewertungen
- Proportional Integral AND Derivative ControllerDokument16 SeitenProportional Integral AND Derivative ControllerAzhar AliNoch keine Bewertungen
- Accenture Project Plan Template1Dokument3 SeitenAccenture Project Plan Template1Sabyasachi PandaNoch keine Bewertungen
- Industrial Diesel Generator Set - 60 HZ: General Specifications KOHLER SDMO Premium QualityDokument7 SeitenIndustrial Diesel Generator Set - 60 HZ: General Specifications KOHLER SDMO Premium Qualitythaisg01Noch keine Bewertungen
- 2022-02-16-144822 C Mission Control Export (1 169)Dokument29 Seiten2022-02-16-144822 C Mission Control Export (1 169)fosterNoch keine Bewertungen
- 2022-02-15-164058 C Mission Control Export (1 123)Dokument8 Seiten2022-02-15-164058 C Mission Control Export (1 123)fosterNoch keine Bewertungen
- Atys G M 4p Quick Start Guide 2018-12-542932 D enDokument2 SeitenAtys G M 4p Quick Start Guide 2018-12-542932 D enfosterNoch keine Bewertungen
- Ats1 1 63aDokument4 SeitenAts1 1 63afosterNoch keine Bewertungen
- 2022-02-17-145756 C Mission Control Export (1 164)Dokument28 Seiten2022-02-17-145756 C Mission Control Export (1 164)fosterNoch keine Bewertungen
- 2022-02-15-110917 C Mission Control Export (1 145)Dokument36 Seiten2022-02-15-110917 C Mission Control Export (1 145)fosterNoch keine Bewertungen
- 16.divisions of Ledger 1 March 2018Dokument18 Seiten16.divisions of Ledger 1 March 2018fosterNoch keine Bewertungen
- Power Supply Architecture For Telecom Application: A Review: October 2010Dokument4 SeitenPower Supply Architecture For Telecom Application: A Review: October 2010fosterNoch keine Bewertungen
- Availability of Decentralized Inverter Concept of PV Power System in Ubon Ratchathani, ThailandDokument10 SeitenAvailability of Decentralized Inverter Concept of PV Power System in Ubon Ratchathani, ThailandfosterNoch keine Bewertungen
- Shield Aviation BulbsDokument1 SeiteShield Aviation BulbsfosterNoch keine Bewertungen
- Arduino Nano ATM328Dokument7 SeitenArduino Nano ATM328upali0167% (3)
- 2.introduction To Accounting and Accounting Terms 2018Dokument6 Seiten2.introduction To Accounting and Accounting Terms 2018fosterNoch keine Bewertungen
- Results Eeb525Dokument8 SeitenResults Eeb525fosterNoch keine Bewertungen
- 14.inventory Feb 2018Dokument7 Seiten14.inventory Feb 2018fosterNoch keine Bewertungen
- FYP Project Presentation TemplateDokument14 SeitenFYP Project Presentation TemplatefosterNoch keine Bewertungen
- 2019 - 04 - 19 20 - 55 Office LensDokument3 Seiten2019 - 04 - 19 20 - 55 Office LensfosterNoch keine Bewertungen
- NEW ArnenaIngridHuiDokument5 SeitenNEW ArnenaIngridHuifosterNoch keine Bewertungen
- Synergy Distributed Meeting Scheduler (SDMS) : Project PresentationDokument17 SeitenSynergy Distributed Meeting Scheduler (SDMS) : Project Presentationridhima kalraNoch keine Bewertungen
- Grant ChartDokument2 SeitenGrant ChartfosterNoch keine Bewertungen
- Grant ChartDokument2 SeitenGrant ChartfosterNoch keine Bewertungen
- Refrensi TesisDokument62 SeitenRefrensi TesisPutri SaljuNoch keine Bewertungen
- Booths AlgorithmDokument1 SeiteBooths AlgorithmfosterNoch keine Bewertungen
- BoothsDokument6 SeitenBoothsfosterNoch keine Bewertungen
- Sem1 2016 - SafeAssign4Students (1) - 1Dokument14 SeitenSem1 2016 - SafeAssign4Students (1) - 1fosterNoch keine Bewertungen
- ECEN 248 Lab 7: Carry Look Ahead and Carry Save Adders: Dept. of Electrical and Computer EngineeringDokument10 SeitenECEN 248 Lab 7: Carry Look Ahead and Carry Save Adders: Dept. of Electrical and Computer EngineeringfosterNoch keine Bewertungen
- BoothsDokument6 SeitenBoothsfosterNoch keine Bewertungen
- f09413745 PDFDokument9 Seitenf09413745 PDFfosterNoch keine Bewertungen
- 5 AdderDokument36 Seiten5 AdderMelody ShieldsNoch keine Bewertungen
- Subject Name: Operation Research Subject Code: 2163201: Mrs. Suman Ashish SharmaDokument98 SeitenSubject Name: Operation Research Subject Code: 2163201: Mrs. Suman Ashish SharmajayNoch keine Bewertungen
- Swing Up and Stabilization Control of A Rotary Inverted PendulumDokument6 SeitenSwing Up and Stabilization Control of A Rotary Inverted PendulumdmorenocNoch keine Bewertungen
- ME 5129 - Principles of Thermal Energy Conversion: Review of Thermodynamics, Fluid Flow and Heat TransferDokument28 SeitenME 5129 - Principles of Thermal Energy Conversion: Review of Thermodynamics, Fluid Flow and Heat TransferAnandNoch keine Bewertungen
- 2007 02 01b Janecek PerceptronDokument37 Seiten2007 02 01b Janecek PerceptronRadenNoch keine Bewertungen
- Small Step 4 - Single Function Machines (Algebra) (Answers)Dokument2 SeitenSmall Step 4 - Single Function Machines (Algebra) (Answers)Joel OkohNoch keine Bewertungen
- 2marks and 10marksDokument16 Seiten2marks and 10markshakkem bNoch keine Bewertungen
- 04-Unit Four - ORDokument27 Seiten04-Unit Four - ORAbdi Mucee TubeNoch keine Bewertungen
- Secure Software Engineering: Unclassified and Unlimited DistributionDokument24 SeitenSecure Software Engineering: Unclassified and Unlimited Distributionlao99130Noch keine Bewertungen
- Feedback and Control Systems: Activity No. 5 - Design of Cascade Compensators Using Root Locus Techniques: PID ControlDokument17 SeitenFeedback and Control Systems: Activity No. 5 - Design of Cascade Compensators Using Root Locus Techniques: PID ControlYvesExequielPascuaNoch keine Bewertungen
- A Guide To Automation Body of KnowledgeDokument9 SeitenA Guide To Automation Body of Knowledgenst_siddiqui0% (5)
- The 62443 Series of StandardsDokument4 SeitenThe 62443 Series of StandardsAnonymous CTQqbhMONoch keine Bewertungen
- 10-Lecture 41, 42 Pole PlacementDokument18 Seiten10-Lecture 41, 42 Pole PlacementHamza KhanNoch keine Bewertungen
- 3 - EcoXOppsPerf - EcoX bFO Rules Detail v2019.07Dokument33 Seiten3 - EcoXOppsPerf - EcoX bFO Rules Detail v2019.07Glenn Midel Delos SantosNoch keine Bewertungen
- (EE3101) Laboratory 2 ReportDokument14 Seiten(EE3101) Laboratory 2 Report94747Noch keine Bewertungen
- Unit 1 - Software Engineering and Project ManagementDokument21 SeitenUnit 1 - Software Engineering and Project ManagementManthan TomarNoch keine Bewertungen
- Systems TheoryDokument10 SeitenSystems TheoryVishal WaghNoch keine Bewertungen
- Venkata Avadhesh - ResumeDokument5 SeitenVenkata Avadhesh - ResumeVijay LS SolutionsNoch keine Bewertungen
- Tuning PI Controllers For Stable Processes With Specifications On Gain and Phase MarginsDokument8 SeitenTuning PI Controllers For Stable Processes With Specifications On Gain and Phase MarginsKapilSahuNoch keine Bewertungen
- Chapter 10Dokument8 SeitenChapter 10Aldon JimenezNoch keine Bewertungen
- JNTUK M.tech R13 I&CS SyllabusDokument15 SeitenJNTUK M.tech R13 I&CS Syllabuschakri474Noch keine Bewertungen
- Landscape and Flux Theory of Non Equilibrium Dynamical Systems With Application To Biology PDFDokument138 SeitenLandscape and Flux Theory of Non Equilibrium Dynamical Systems With Application To Biology PDFToh Qin KaneNoch keine Bewertungen
- IOT and ERP SYSTEMDokument10 SeitenIOT and ERP SYSTEMSujay SinghviNoch keine Bewertungen
- Syllabus BBA602 SC&LM Jan2023Dokument4 SeitenSyllabus BBA602 SC&LM Jan2023Server IssueNoch keine Bewertungen
- Signals, Spectra, Signal Processing ECE 401 (TIP Reviewer)Dokument40 SeitenSignals, Spectra, Signal Processing ECE 401 (TIP Reviewer)James Lindo100% (2)
- A Behavior-Based Architecture For Unmanned Aerial: VehiclesDokument7 SeitenA Behavior-Based Architecture For Unmanned Aerial: VehiclesJoao PedroNoch keine Bewertungen
- Ringkasan Magang Kerja MeitinDokument7 SeitenRingkasan Magang Kerja MeitinEvi Valharrez Di OssannaiNoch keine Bewertungen
- Syllabus ChBE 2130 Spring 2020 GTDokument4 SeitenSyllabus ChBE 2130 Spring 2020 GTaNoch keine Bewertungen
- Caed101 de Castro Acn1 Assignment ProblemDokument2 SeitenCaed101 de Castro Acn1 Assignment ProblemIra Grace De CastroNoch keine Bewertungen
- (2017) Nonlinear Control of Robots and Unmanned Aerial Vehicles - An Integrated Approach PDFDokument563 Seiten(2017) Nonlinear Control of Robots and Unmanned Aerial Vehicles - An Integrated Approach PDFTrần Trọng KhôiNoch keine Bewertungen
- Manual Testing Interview QuestionsDokument21 SeitenManual Testing Interview QuestionspoorilonavalaNoch keine Bewertungen