Das könnte Ihnen auch gefallen
- 2.1.2 Primary Control Techniques in AC MicrogridsDokument1 Seite2.1.2 Primary Control Techniques in AC MicrogridsAnonymous rTRz30fNoch keine Bewertungen
- 01 MarginsDokument4 Seiten01 MarginsAnonymous rTRz30fNoch keine Bewertungen
- 1 BrochureDokument2 Seiten1 BrochureAnonymous rTRz30fNoch keine Bewertungen
- Modelling of Uncertain SystemDokument13 SeitenModelling of Uncertain SystemAnonymous rTRz30fNoch keine Bewertungen
- Director of Maryland Power Electronics LaboratoryDokument3 SeitenDirector of Maryland Power Electronics LaboratoryAnonymous rTRz30fNoch keine Bewertungen
- Ojee ScheduleDokument2 SeitenOjee ScheduleAnonymous rTRz30fNoch keine Bewertungen
- Krishna Filling Station Krishna Filling Station: Dealer: B.P.C.. Dealer: B.P.C.Dokument1 SeiteKrishna Filling Station Krishna Filling Station: Dealer: B.P.C.. Dealer: B.P.C.Anonymous rTRz30fNoch keine Bewertungen
- Properties of Electrical Engineering MaterialsDokument393 SeitenProperties of Electrical Engineering MaterialsManikanta Phanikumar100% (2)
- Brief Introduction About TRMSDokument1 SeiteBrief Introduction About TRMSAnonymous rTRz30fNoch keine Bewertungen
- 02 WholeDokument287 Seiten02 WholeAnonymous rTRz30fNoch keine Bewertungen
- Properties of Electrical Engineering MaterialsDokument393 SeitenProperties of Electrical Engineering MaterialsManikanta Phanikumar100% (2)
- NIT Faculty ApplicationDokument2 SeitenNIT Faculty ApplicationMehanathan Maggie MikeyNoch keine Bewertungen
- AdvertisementDokument1 SeiteAdvertisementAnonymous rTRz30fNoch keine Bewertungen
- 02 WholeDokument287 Seiten02 WholeAnonymous rTRz30fNoch keine Bewertungen
- Cuiqing Du PH DDokument130 SeitenCuiqing Du PH DAnonymous rTRz30fNoch keine Bewertungen
- 2Dokument6 Seiten2Anonymous rTRz30fNoch keine Bewertungen
- Matlab IdentificationDokument408 SeitenMatlab IdentificationAnonymous rTRz30fNoch keine Bewertungen
- Struct Examples PDFDokument33 SeitenStruct Examples PDFAnonymous rTRz30fNoch keine Bewertungen
- AnsDokument7 SeitenAnsAnonymous rTRz30fNoch keine Bewertungen
- Olivebranch Menu1Dokument7 SeitenOlivebranch Menu1Anonymous rTRz30fNoch keine Bewertungen
- Listening Skills PDFDokument26 SeitenListening Skills PDFAnonymous rTRz30fNoch keine Bewertungen
- l8 File PDFDokument19 Seitenl8 File PDFAnonymous rTRz30fNoch keine Bewertungen
- CVX UsrguideDokument72 SeitenCVX UsrguideWilly WenNoch keine Bewertungen
- State SpaceDokument9 SeitenState SpaceAnonymous rTRz30fNoch keine Bewertungen
- What Do You Mean by Penalizing SomethingDokument1 SeiteWhat Do You Mean by Penalizing SomethingAnonymous rTRz30fNoch keine Bewertungen
- Programming and Data StructureDokument108 SeitenProgramming and Data Structureali-abdul-razzaq-266100% (1)
- Cascade Structural Model Approximation of Identified State Space ModelsDokument6 SeitenCascade Structural Model Approximation of Identified State Space ModelsAnonymous rTRz30fNoch keine Bewertungen
- Harmonic Analysis of Operators in Hilbert Sapces Nagy Foias PDFDokument401 SeitenHarmonic Analysis of Operators in Hilbert Sapces Nagy Foias PDFAnonymous rTRz30fNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Surface Roughness Review in Ultra-Precision MachiningDokument53 SeitenSurface Roughness Review in Ultra-Precision MachiningEmpresaSTINoch keine Bewertungen
- Viscoelastic Modeling of Flexible Pavement With Abaqus PDFDokument143 SeitenViscoelastic Modeling of Flexible Pavement With Abaqus PDFcabrel TokamNoch keine Bewertungen
- Principles of Geotechnical Engineering, SI Edition 9th Edition by Braja M. Das, Khaled Sobhan Solution ManualDokument14 SeitenPrinciples of Geotechnical Engineering, SI Edition 9th Edition by Braja M. Das, Khaled Sobhan Solution ManualJehan Pahlevi100% (1)
- Map Projections and Coordinate SystemDokument7 SeitenMap Projections and Coordinate SystemjparamNoch keine Bewertungen
- Mathematical Expectation FormulasDokument11 SeitenMathematical Expectation FormulasSirfoolNoch keine Bewertungen
- Dyn 006H DepressuringDokument14 SeitenDyn 006H DepressuringNicandroGonzalesNoch keine Bewertungen
- Comprehensive List of Heat Transfer Fluids and PropertiesDokument3 SeitenComprehensive List of Heat Transfer Fluids and PropertiesChris SmithNoch keine Bewertungen
- Acceleration Lab ReportDokument5 SeitenAcceleration Lab ReportRa Raul0% (1)
- A Study On Cohesive Zone ModelDokument19 SeitenA Study On Cohesive Zone ModelabishayNoch keine Bewertungen
- Impulse 4.0 Users Guide SI PDFDokument554 SeitenImpulse 4.0 Users Guide SI PDFalberto fuentealbaNoch keine Bewertungen
- GC Validation TCDDokument6 SeitenGC Validation TCDRajan Chidambaram SivaNoch keine Bewertungen
- Analysis On Statically Determinate StructuresDokument22 SeitenAnalysis On Statically Determinate StructuresJorn Utzon100% (1)
- Subsea PLEM & PLET - Theory & Application PDFDokument127 SeitenSubsea PLEM & PLET - Theory & Application PDFPaolo BertolliNoch keine Bewertungen
- Qualification of Innovative Floating Substructures For 10MW Wind Turbines and Water Depths Greater Than 50mDokument41 SeitenQualification of Innovative Floating Substructures For 10MW Wind Turbines and Water Depths Greater Than 50mjuho jungNoch keine Bewertungen
- The Relation Between Expressions for Time-Dependent Electromagnetic Fields Given by Jefimenko and Panofsky and PhillipsDokument8 SeitenThe Relation Between Expressions for Time-Dependent Electromagnetic Fields Given by Jefimenko and Panofsky and PhillipsCarolina BouvierNoch keine Bewertungen
- Behavior of Steel Under TensionDokument6 SeitenBehavior of Steel Under TensionAshNoch keine Bewertungen
- dm16 RRDokument16 Seitendm16 RRioan dumitrescuNoch keine Bewertungen
- (Arfken) Mathematical Methods For Physicists 7th SOLUCIONARIO PDFDokument525 Seiten(Arfken) Mathematical Methods For Physicists 7th SOLUCIONARIO PDFJulian Montero100% (3)
- Exercise 8 Full ReportDokument41 SeitenExercise 8 Full ReportPrincess Requiso100% (2)
- PEDH Volume 1 2013-14 PDFDokument421 SeitenPEDH Volume 1 2013-14 PDFSaurabh Gupta100% (2)
- Leven William F 200605 PHD PDFDokument132 SeitenLeven William F 200605 PHD PDFDeni ChanNoch keine Bewertungen
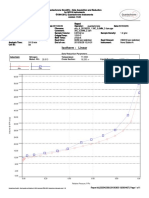
- GraphIsotherm Linear STTN - A - 20150226 - 1 30C - 0,5MM - 3 JamDokument1 SeiteGraphIsotherm Linear STTN - A - 20150226 - 1 30C - 0,5MM - 3 JamYunus HidayatNoch keine Bewertungen
- Astavarga Tables of JupiterDokument4 SeitenAstavarga Tables of JupiterSam SungNoch keine Bewertungen
- Cantilever Discussion and ResultDokument12 SeitenCantilever Discussion and ResultYewHang SooNoch keine Bewertungen
- Hidroloji UygulamaDokument4 SeitenHidroloji Uygulamaİlker YeşilyurtNoch keine Bewertungen
- Three problems on mass transfer diffusion processesDokument15 SeitenThree problems on mass transfer diffusion processesPasha Tan100% (1)
- Mass, Stiffness, and Damping Matrix Estimates From Structural MeasurementsDokument7 SeitenMass, Stiffness, and Damping Matrix Estimates From Structural Measurementscarlos0094Noch keine Bewertungen
- Cmos Electronic PDFDokument356 SeitenCmos Electronic PDFJustin WilliamsNoch keine Bewertungen
- Erico System 3000Dokument12 SeitenErico System 3000Juan E Torres M67% (3)
- Questions On Concepts Q5.1) : and andDokument23 SeitenQuestions On Concepts Q5.1) : and andAlejandra Fajardo ApoloNoch keine Bewertungen