Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Analog Million Mega Ohm MeterDokument2 SeitenAnalog Million Mega Ohm Meterdeepanshu singh vishenNoch keine Bewertungen
- Algebra PDFDokument189 SeitenAlgebra PDFAlmir AdrovicNoch keine Bewertungen
- Quanto: Tracking Energy in Networked Embedded SystemsDokument16 SeitenQuanto: Tracking Energy in Networked Embedded SystemsNarasimha KulkarniNoch keine Bewertungen
- Ieee FormatDokument2 SeitenIeee FormatNarasimha KulkarniNoch keine Bewertungen
- Operating System Viva QuestionsDokument7 SeitenOperating System Viva QuestionsankitamaheshwariNoch keine Bewertungen
- Understanding Power System HarmonicsDokument29 SeitenUnderstanding Power System Harmonicsbpd21Noch keine Bewertungen
- Anjuman Engineering College, Bhatkal Themes of Presentation Civil Engg. Instructions To The CandidatesDokument3 SeitenAnjuman Engineering College, Bhatkal Themes of Presentation Civil Engg. Instructions To The CandidatesNarasimha Kulkarni100% (2)
- Student Application 1Dokument1 SeiteStudent Application 1Narasimha KulkarniNoch keine Bewertungen
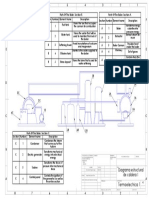
- Termoelectrica 1: Diagrama Estructural de Caldera 1Dokument1 SeiteTermoelectrica 1: Diagrama Estructural de Caldera 1Pedro Gabriel GonzálezNoch keine Bewertungen
- DC Earth Fault Detector Measures Ground ResistanceDokument1 SeiteDC Earth Fault Detector Measures Ground ResistanceTheULTRANoch keine Bewertungen
- G - Short-Circuit Current Impedance SC2500 - 2750 - 3000-EV - V4.0 - ENDokument6 SeitenG - Short-Circuit Current Impedance SC2500 - 2750 - 3000-EV - V4.0 - ENVishnu ShankerNoch keine Bewertungen
- Offshore Terminals For The Transportation of Liquefied Petroleum GasDokument3 SeitenOffshore Terminals For The Transportation of Liquefied Petroleum GasPavithra Anandan100% (3)
- PRICE LIST FOR LOW-VOLTAGE ELECTRICAL PRODUCTSDokument22 SeitenPRICE LIST FOR LOW-VOLTAGE ELECTRICAL PRODUCTSIndra ChristiawanNoch keine Bewertungen
- Verify Curie-Weiss Law for Ceramic & Polymer CapacitorsDokument4 SeitenVerify Curie-Weiss Law for Ceramic & Polymer CapacitorsSanjay BhandarkarNoch keine Bewertungen
- Traditional Power Generation TrainerDokument3 SeitenTraditional Power Generation Trainerpapah pungNoch keine Bewertungen
- 1065767398849-B65 EnglischDokument8 Seiten1065767398849-B65 Englischvt4020653934Noch keine Bewertungen
- Assignment3 Btech Sem3 TD Mu207Dokument2 SeitenAssignment3 Btech Sem3 TD Mu207ADITYA SRIKAR KOTANoch keine Bewertungen
- Wartsila SP Technical Paper LPG Systems PDFDokument18 SeitenWartsila SP Technical Paper LPG Systems PDFGhulam-ullah KhanNoch keine Bewertungen
- Webinar Getting Biogas To The RNG Market Carbotech PSADokument69 SeitenWebinar Getting Biogas To The RNG Market Carbotech PSAMarcela FragozoNoch keine Bewertungen
- Bharat Charger-15 KWDokument2 SeitenBharat Charger-15 KWSanthosh V RaajendiranNoch keine Bewertungen
- Tpss Jatibening Baru Power Cable Connection ListDokument8 SeitenTpss Jatibening Baru Power Cable Connection ListHapidz ErwinNoch keine Bewertungen
- Dual Fuel Engine Fuelled With Ethanol and Diesel Fuel: Andrzej KowalewiczDokument9 SeitenDual Fuel Engine Fuelled With Ethanol and Diesel Fuel: Andrzej KowalewiczRickson Viahul Rayan CNoch keine Bewertungen
- CT SolutionsForCPD EN LRDokument12 SeitenCT SolutionsForCPD EN LRWilly Mauricio Garcia PorcelNoch keine Bewertungen
- HVE Question BankDokument27 SeitenHVE Question BankArpit MehtaNoch keine Bewertungen
- DESOL Solar SystemDokument55 SeitenDESOL Solar SystemNabeel MhmdNoch keine Bewertungen
- I.R Test of TransformerDokument1 SeiteI.R Test of TransformerVedant .Chavan50% (2)
- Energy and Climate CoursesDokument17 SeitenEnergy and Climate CoursesShakerMahmoodNoch keine Bewertungen
- 6-FMX Series: 6-FMX-200 Front Terminal BatteryDokument2 Seiten6-FMX Series: 6-FMX-200 Front Terminal BatteryMajor Prince100% (1)
- EVE 32 07eDokument45 SeitenEVE 32 07eismoyoNoch keine Bewertungen
- EE-260 Lecture 07, 08, 09 TransformerDokument49 SeitenEE-260 Lecture 07, 08, 09 TransformerNihal AhmadNoch keine Bewertungen
- C6 ThermochemistryDokument57 SeitenC6 ThermochemistryJhiGz Llausas de GuzmanNoch keine Bewertungen
- Siemens Acb Spares Parts List NewDokument30 SeitenSiemens Acb Spares Parts List Newpsvsridhar75% (4)
- Exxonmobil Premium Hdme 50 Best PracticeDokument1 SeiteExxonmobil Premium Hdme 50 Best PracticeuauxjoNoch keine Bewertungen
- Steam TurbineDokument12 SeitenSteam TurbineMandeep Singh PannuNoch keine Bewertungen
- 25 Green Aviation Tech AdvancesDokument3 Seiten25 Green Aviation Tech AdvancesSchutzstaffelDHNoch keine Bewertungen
- IEE Current Ratings Regulations Table 4E1ADokument3 SeitenIEE Current Ratings Regulations Table 4E1AsanjaigNoch keine Bewertungen
- BeerVM11e PPT Ch13Dokument108 SeitenBeerVM11e PPT Ch13brayanNoch keine Bewertungen