Das könnte Ihnen auch gefallen
- AromatherapyDokument15 SeitenAromatherapymurrmurreNoch keine Bewertungen
- Understanding PumpDokument113 SeitenUnderstanding Pumpnyr1981_942955963100% (5)
- Solution Manual-Statistical Physics of Particles by Meheran KardarDokument165 SeitenSolution Manual-Statistical Physics of Particles by Meheran KardarDanielle Nguyen7% (14)
- Pole Placement1Dokument46 SeitenPole Placement1masd100% (1)
- KRPL Shahjahanpur Check List For Arc Welding MachineDokument1 SeiteKRPL Shahjahanpur Check List For Arc Welding MachineA S YadavNoch keine Bewertungen
- Op Amp Lab ReportDokument21 SeitenOp Amp Lab ReportArabEmirates67% (3)
- Adolescents and Career DevelopmentDokument10 SeitenAdolescents and Career DevelopmentMasrijah MasirNoch keine Bewertungen
- Lab 4Dokument15 SeitenLab 4Aliqpsk AlasadyNoch keine Bewertungen
- Unit Step Function in MatlabDokument6 SeitenUnit Step Function in Matlabshaista005100% (3)
- Chapter 6 PIDDokument43 SeitenChapter 6 PIDkibrom atsbhaNoch keine Bewertungen
- Electronics Coaching Notes (Final)Dokument20 SeitenElectronics Coaching Notes (Final)Eden Ethelynn Mique100% (1)
- Ec3351 Control SystemsDokument18 SeitenEc3351 Control SystemsParanthaman GNoch keine Bewertungen
- Practical Research 2Dokument16 SeitenPractical Research 2Benedict Coloma BandongNoch keine Bewertungen
- Transfer Functions and Block Diagrams PDFDokument21 SeitenTransfer Functions and Block Diagrams PDFJuliana NepembeNoch keine Bewertungen
- SWAMINATHAN Ajanta RhapsodyDokument227 SeitenSWAMINATHAN Ajanta RhapsodyRoberto E. García100% (1)
- Control Systems Laboratory Experiment 4 Open-Loop vs. Closed-Loop Control SystemsDokument6 SeitenControl Systems Laboratory Experiment 4 Open-Loop vs. Closed-Loop Control SystemsAli MoustafaNoch keine Bewertungen
- Lecture12-Using PIC Micro Controller 16F877ADokument57 SeitenLecture12-Using PIC Micro Controller 16F877ADoodee Mohammed100% (4)
- The FlyDokument8 SeitenThe FlyDrei Tiam Lacadin100% (1)
- Ece124d - Comm4d - FinalDokument110 SeitenEce124d - Comm4d - FinalMarites CervoNoch keine Bewertungen
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsVon EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsNoch keine Bewertungen
- New Contributions To Load Flow Studies by The Method of Reduction and RestorationDokument7 SeitenNew Contributions To Load Flow Studies by The Method of Reduction and RestorationncleninNoch keine Bewertungen
- Signals in MatLab PDFDokument18 SeitenSignals in MatLab PDFPratik SarkarNoch keine Bewertungen
- Time Response AnalysisDokument43 SeitenTime Response AnalysisAkmal IsnaeniNoch keine Bewertungen
- Counters 123Dokument26 SeitenCounters 123raajeevaasNoch keine Bewertungen
- Lecture 20 of Goertzel AlgoDokument4 SeitenLecture 20 of Goertzel Algoc_mc2Noch keine Bewertungen
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsVon EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNoch keine Bewertungen
- Bode Plot, Methodology To Graph It, Analysis Of: Integrator, Derivator, Constant, First Order, Second OrderDokument43 SeitenBode Plot, Methodology To Graph It, Analysis Of: Integrator, Derivator, Constant, First Order, Second OrderMauricio Calle SalinasNoch keine Bewertungen
- PID BasicsDokument29 SeitenPID Basicssrikanthislavatu7615Noch keine Bewertungen
- Time Response Analysis of Control SystemsDokument5 SeitenTime Response Analysis of Control SystemsAmyiel FloresNoch keine Bewertungen
- Introduction To State Space AnalysisDokument63 SeitenIntroduction To State Space AnalysisTamrat Zewde100% (1)
- Laplace Transforms - Practice QuestionsDokument4 SeitenLaplace Transforms - Practice QuestionsBala KumarNoch keine Bewertungen
- 5V Power Supply Using 7805 Voltage Regulator With DesignDokument25 Seiten5V Power Supply Using 7805 Voltage Regulator With DesignLawrence Ngari100% (2)
- Signal Flow Graph (Diajarkan)Dokument57 SeitenSignal Flow Graph (Diajarkan)Muhammad DienullahNoch keine Bewertungen
- Activity 03Dokument11 SeitenActivity 03kennethNoch keine Bewertungen
- ME 1402 - Mechatronics PDFDokument6 SeitenME 1402 - Mechatronics PDFnagarajanceNoch keine Bewertungen
- PDFDokument4 SeitenPDFOmkar DalviNoch keine Bewertungen
- DSP Laboratory Activity 2 NewDokument16 SeitenDSP Laboratory Activity 2 NewBradLyBerroyaNoch keine Bewertungen
- DSP Lab ManualDokument67 SeitenDSP Lab Manualloststranger990100% (1)
- StabilityDokument16 SeitenStabilitythankamonyNoch keine Bewertungen
- Lecture 14, 15 StabilityDokument45 SeitenLecture 14, 15 StabilityHamza KhanNoch keine Bewertungen
- State Space Representation of Transfer Function SystemsDokument5 SeitenState Space Representation of Transfer Function SystemsIvan VillanevaNoch keine Bewertungen
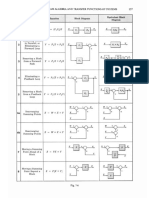
- CHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsDokument6 SeitenCHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsIan UdhiliNoch keine Bewertungen
- Zigbee Based Wireless Remote Weather Station Monitoring SystemDokument22 SeitenZigbee Based Wireless Remote Weather Station Monitoring SystemSai Krishna Bangaru25% (4)
- Mit Aoe MCQ Z TransformDokument50 SeitenMit Aoe MCQ Z TransformRishabh SinghalNoch keine Bewertungen
- EE250: Lecture Note Nonlinear Systems and LinearizationDokument5 SeitenEE250: Lecture Note Nonlinear Systems and Linearizationfghstrh100% (1)
- LS102: Linear Time-Invariant SystemsDokument8 SeitenLS102: Linear Time-Invariant SystemsBayar JargalNoch keine Bewertungen
- Routh Criterion - Tutorial 7 - Co - 12Dokument3 SeitenRouth Criterion - Tutorial 7 - Co - 12Haelu KuNoch keine Bewertungen
- Study of Wireless Power Transfer SynopsisDokument9 SeitenStudy of Wireless Power Transfer SynopsisAnkitha G NayakaNoch keine Bewertungen
- Simulation of Electric Machine and Drive Systems Using Matlab and SimulinkDokument17 SeitenSimulation of Electric Machine and Drive Systems Using Matlab and SimulinkSamuel Alves de SouzaNoch keine Bewertungen
- Ei 7211-Circuit Simulation Lab List of ExperimentsDokument61 SeitenEi 7211-Circuit Simulation Lab List of ExperimentsKʀɩsʜŋʌ KʌŋʌŋNoch keine Bewertungen
- IV Characteristic TransistorDokument7 SeitenIV Characteristic TransistorNida RidzuanNoch keine Bewertungen
- Excel Review Center ECE Refresher/Coaching Estth1Dokument4 SeitenExcel Review Center ECE Refresher/Coaching Estth1Danica Luisa GazaaNoch keine Bewertungen
- Communication SystemDokument13 SeitenCommunication SystemSyieda ZamryNoch keine Bewertungen
- ProblemDokument89 SeitenProblemPanneer SelvamNoch keine Bewertungen
- Final Year Project ProposalDokument31 SeitenFinal Year Project ProposalteklethelatterNoch keine Bewertungen
- Objective Type Question For Adc/Dac: A. B. C. DDokument6 SeitenObjective Type Question For Adc/Dac: A. B. C. DsuryaNoch keine Bewertungen
- Gain & Phase Margin - Bode PlotDokument28 SeitenGain & Phase Margin - Bode PlotDeepthiNoch keine Bewertungen
- rr320803 Process Dynamics and ControlDokument6 Seitenrr320803 Process Dynamics and ControlSRINIVASA RAO GANTANoch keine Bewertungen
- Real-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using LabviewDokument6 SeitenReal-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using Labviewvikalp guptaNoch keine Bewertungen
- Control System Examples - CH 1 - 7 - Sept 2017Dokument411 SeitenControl System Examples - CH 1 - 7 - Sept 2017Karthick PN0% (1)
- Modern Intelligent Instruments - Theory and ApplicationVon EverandModern Intelligent Instruments - Theory and ApplicationNoch keine Bewertungen
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationVon EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNoch keine Bewertungen
- Men of Physics Lord Rayleigh–The Man and His Work: The Commonwealth and International Library: Selected Readings in PhysicsVon EverandMen of Physics Lord Rayleigh–The Man and His Work: The Commonwealth and International Library: Selected Readings in PhysicsNoch keine Bewertungen
- Dynamic System Analysis and Simulation - 19Dokument7 SeitenDynamic System Analysis and Simulation - 19Gabriel CaldasNoch keine Bewertungen
- Practice Questions For Quiz 1Dokument2 SeitenPractice Questions For Quiz 1Steven BrowneNoch keine Bewertungen
- CCP QB 2017-18 (Xerox Final)Dokument16 SeitenCCP QB 2017-18 (Xerox Final)Kotteeswaran Rangasamy R100% (1)
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkDokument10 SeitenMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraNoch keine Bewertungen
- Transformational Leadership in The UmcDokument17 SeitenTransformational Leadership in The Umcapi-202352366Noch keine Bewertungen
- Cyanocobalamin Injection Clinical Pharmacology Drug MonographDokument36 SeitenCyanocobalamin Injection Clinical Pharmacology Drug MonographLaureyNoch keine Bewertungen
- Language Loss in Waray: Ni Voltaire Q. UyzonDokument23 SeitenLanguage Loss in Waray: Ni Voltaire Q. UyzonMary Rose OmbrogNoch keine Bewertungen
- LAB Find Out The Bottle ContentsDokument4 SeitenLAB Find Out The Bottle ContentschanNoch keine Bewertungen
- Iso 27001 Requirementsandnetwrixfunctionalitymapping 1705578827995Dokument33 SeitenIso 27001 Requirementsandnetwrixfunctionalitymapping 1705578827995Tassnim Ben youssefNoch keine Bewertungen
- RG-RAP6260 (G) Hardware InstallationDokument26 SeitenRG-RAP6260 (G) Hardware InstallationrazuetNoch keine Bewertungen
- (Official) AVTC5 - Unit 1 - Before ClassDokument11 Seiten(Official) AVTC5 - Unit 1 - Before ClassNhân NguyễnNoch keine Bewertungen
- Menu Planning in HospitalDokument4 SeitenMenu Planning in HospitalERva Soelkarnaen100% (1)
- Climate Declaration: For White Corex PlasterboardDokument1 SeiteClimate Declaration: For White Corex PlasterboardAbdullah BeckerNoch keine Bewertungen
- Ericsson AXE 810: Switch (ROTD)Dokument4 SeitenEricsson AXE 810: Switch (ROTD)Kao Sun HoNoch keine Bewertungen
- Simulation of 1,3-Butadiene Extractive Distillation Process Using N-Methyl-2-Pyrrolidone SolventDokument7 SeitenSimulation of 1,3-Butadiene Extractive Distillation Process Using N-Methyl-2-Pyrrolidone SolventAA0809Noch keine Bewertungen
- Peter Brandt InterviewDokument38 SeitenPeter Brandt InterviewNishant P Kalaskar100% (1)
- Thermal ComfortDokument50 SeitenThermal ComfortSSNoch keine Bewertungen
- Datasheet TBJ SBW13009-KDokument5 SeitenDatasheet TBJ SBW13009-KMarquinhosCostaNoch keine Bewertungen
- Jo - Mc.Donough. ESP in Perspective A Practical Guide. London. Collin ELT. 1984. p.3Dokument6 SeitenJo - Mc.Donough. ESP in Perspective A Practical Guide. London. Collin ELT. 1984. p.3Falihatul Kholidiyah100% (1)
- Cause List 2.1.2023Dokument4 SeitenCause List 2.1.2023あいうえおかきくけこNoch keine Bewertungen
- The Roti Canai StoryDokument5 SeitenThe Roti Canai StoryDr Bugs TanNoch keine Bewertungen
- Organic Food Business in India A Survey of CompaniDokument19 SeitenOrganic Food Business in India A Survey of CompaniShravan KemturNoch keine Bewertungen
- Lesson 7Dokument6 SeitenLesson 7Jeya Plays YTNoch keine Bewertungen
- Croda Smarter Polymers Guide Sep 2019Dokument20 SeitenCroda Smarter Polymers Guide Sep 2019Keith Tamura100% (1)
- UVEX - Helmets & Eyewear 2009Dokument19 SeitenUVEX - Helmets & Eyewear 2009Ivica1977Noch keine Bewertungen
- Review of Ventura's "An Overview of Child Psychology in The Philippines"Dokument2 SeitenReview of Ventura's "An Overview of Child Psychology in The Philippines"Irene CayeNoch keine Bewertungen