Das könnte Ihnen auch gefallen
- Distributed Control System A Complete Guide - 2020 EditionVon EverandDistributed Control System A Complete Guide - 2020 EditionNoch keine Bewertungen
- Highway Addressable Remote Transducer (HART)Dokument41 SeitenHighway Addressable Remote Transducer (HART)Abdou KarimNoch keine Bewertungen
- Report On HART COMMUNICATIONDokument26 SeitenReport On HART COMMUNICATIONmhtchdhry06_9936718775% (4)
- Highway Addressable Remote Transducer (HART)Dokument41 SeitenHighway Addressable Remote Transducer (HART)RajeshNoch keine Bewertungen
- Basics of HartDokument59 SeitenBasics of Hartjmathew_984887Noch keine Bewertungen
- Presentation On Hart Communication ProtocolDokument28 SeitenPresentation On Hart Communication ProtocolHarshil GuptaNoch keine Bewertungen
- HART Communication Protocol Part 1Dokument18 SeitenHART Communication Protocol Part 1Atul SharmaNoch keine Bewertungen
- HART Communication Protocol - How HART WorksDokument3 SeitenHART Communication Protocol - How HART WorksKark Ghansala100% (1)
- Hart Communication: A Seminar ReportDokument8 SeitenHart Communication: A Seminar Reportmhtchdhry06_99367187Noch keine Bewertungen
- 2 Basics of Functional Safety in Process Industry A Practical Approach To IEC 61511 EN61511 SILDokument33 Seiten2 Basics of Functional Safety in Process Industry A Practical Approach To IEC 61511 EN61511 SIL최재호Noch keine Bewertungen
- ICS OverviewDokument36 SeitenICS Overviewisra marabahNoch keine Bewertungen
- Hart ProtocolDokument13 SeitenHart ProtocolRey-an A. MorenoNoch keine Bewertungen
- Hart Communication ReportDokument25 SeitenHart Communication ReportMuhammed NizarNoch keine Bewertungen
- FDT - Field Device Tool PDFDokument8 SeitenFDT - Field Device Tool PDFcalripkenNoch keine Bewertungen
- Scientech 2808Dokument138 SeitenScientech 2808Divneet Singh KapoorNoch keine Bewertungen
- Foundation Fieldbus Safety InstrumentedDokument20 SeitenFoundation Fieldbus Safety InstrumentedmoralesmjyNoch keine Bewertungen
- 002-MHIAC - PPT - Presentation IEC-61131 3 StandardDokument47 Seiten002-MHIAC - PPT - Presentation IEC-61131 3 StandardEder JuárezNoch keine Bewertungen
- Da Server ManagerDokument32 SeitenDa Server ManagerFeri HandoyoNoch keine Bewertungen
- 02 - 2012 - Enus Drager Polytron 8100Dokument40 Seiten02 - 2012 - Enus Drager Polytron 8100Roberto de la CruzNoch keine Bewertungen
- PH Analyzers Interview Questions & Answers Instrumentation ToolsDokument13 SeitenPH Analyzers Interview Questions & Answers Instrumentation Toolsnik100% (1)
- Guide To OPCDokument9 SeitenGuide To OPCpartho143Noch keine Bewertungen
- Modbus FAQDokument5 SeitenModbus FAQspoof183Noch keine Bewertungen
- 73 - 23 - Eec Low Voltage Directive GuidelinesDokument15 Seiten73 - 23 - Eec Low Voltage Directive Guidelinesvishnur795Noch keine Bewertungen
- Executive Summary: Action To Be Taken: Related Documents:: International Maritime OrganizationDokument5 SeitenExecutive Summary: Action To Be Taken: Related Documents:: International Maritime Organizationmaruka33Noch keine Bewertungen
- LVD GuidelinesDokument83 SeitenLVD GuidelinesVikram TambeNoch keine Bewertungen
- Modbus ManualDokument93 SeitenModbus ManualjunsanaNoch keine Bewertungen
- Abbott Standard Interface RS-232 ManualDokument166 SeitenAbbott Standard Interface RS-232 ManualOmerNoch keine Bewertungen
- Bently Nevada Orbit 60 Series System DatasheetDokument34 SeitenBently Nevada Orbit 60 Series System Datasheetabhishek malhotraNoch keine Bewertungen
- Opc FaqDokument19 SeitenOpc FaqNguyễnQuíTrọngNoch keine Bewertungen
- On Autonomic ComputingDokument14 SeitenOn Autonomic ComputingKamran AnasNoch keine Bewertungen
- F7126e HIMA HIQuad h41 h51Dokument2 SeitenF7126e HIMA HIQuad h41 h51AkoKhalediNoch keine Bewertungen
- Modbus para DUCATI LCD - 96Dokument27 SeitenModbus para DUCATI LCD - 96Pau Andrea CNoch keine Bewertungen
- 02-Safeethernet 12 e FDokument67 Seiten02-Safeethernet 12 e FDario FaoroNoch keine Bewertungen
- Profibus GuidelineDokument99 SeitenProfibus Guidelinemaikonrangel100% (1)
- MTL IS Interfaces PDFDokument30 SeitenMTL IS Interfaces PDFmasimeriseNoch keine Bewertungen
- Fs GatewayDokument86 SeitenFs GatewayYahya AdamNoch keine Bewertungen
- 140 Cpu 434 12aDokument190 Seiten140 Cpu 434 12amiguelmed21Noch keine Bewertungen
- Allen Bradley Plant Wide Process ControlDokument2 SeitenAllen Bradley Plant Wide Process ControlEric DunnNoch keine Bewertungen
- FDT DTMDokument6 SeitenFDT DTMsathyabnNoch keine Bewertungen
- "Namur Standard" Sensors: Process Control - Factory Automation - Explosion Protection - Machine SafetyDokument2 Seiten"Namur Standard" Sensors: Process Control - Factory Automation - Explosion Protection - Machine SafetySaqueib Khan100% (1)
- Distributed Control System Slide Group 8 FinalDokument20 SeitenDistributed Control System Slide Group 8 FinalTakudzwa MatangiraNoch keine Bewertungen
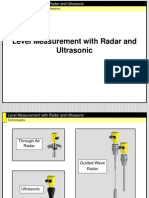
- Radar and Ultrasonic Level MeasurementDokument24 SeitenRadar and Ultrasonic Level MeasurementvenkatsubbuNoch keine Bewertungen
- Experion Network Best Practices WP PDFDokument41 SeitenExperion Network Best Practices WP PDFredaNoch keine Bewertungen
- TRICON Product Spec PDFDokument78 SeitenTRICON Product Spec PDFUdaya Kumar Krishnan100% (1)
- FISCODokument19 SeitenFISCOsayedmhNoch keine Bewertungen
- Oil & Gas Industry Challenges: Analyze Optimize VisualizeDokument4 SeitenOil & Gas Industry Challenges: Analyze Optimize VisualizeIbnu JunifanNoch keine Bewertungen
- HART DTM Library CertificateDokument2 SeitenHART DTM Library Certificateraul salinas100% (1)
- Ethernet APL+Ethernet To The Field+en+FINAL+September 2020 1.1Dokument18 SeitenEthernet APL+Ethernet To The Field+en+FINAL+September 2020 1.1Com DigfulNoch keine Bewertungen
- Why Effective Alarm Management Is So Important in IndustryDokument43 SeitenWhy Effective Alarm Management Is So Important in IndustryArgha Kusumah ReiNoch keine Bewertungen
- Industrial VariablesDokument59 SeitenIndustrial VariablesMuhamad RidzwanNoch keine Bewertungen
- ABB - AMD220 Pressure GaugeDokument26 SeitenABB - AMD220 Pressure GaugeVikas JainNoch keine Bewertungen
- OPC Tunnel-AC500 FreelanceDokument17 SeitenOPC Tunnel-AC500 FreelanceBahadır Coşkuner100% (1)
- Yokogawa ManualDokument441 SeitenYokogawa ManualfemiunitedNoch keine Bewertungen
- 3BSE068129 en B Best Practice Guidelines - Operator Workplace and Process GraphicsDokument14 Seiten3BSE068129 en B Best Practice Guidelines - Operator Workplace and Process GraphicsИван ЛупушорNoch keine Bewertungen
- Instrumentation Automation Part25Dokument2 SeitenInstrumentation Automation Part25ArunNoch keine Bewertungen
- © 2005 HART Communication FoundationDokument58 Seiten© 2005 HART Communication Foundationkochicomm0% (1)
- Networks in Process AutomationDokument24 SeitenNetworks in Process AutomationRajeshNoch keine Bewertungen
- ProductSpec Triconex Tricon 4351BDokument36 SeitenProductSpec Triconex Tricon 4351BARTURNoch keine Bewertungen
- When Good Alarms Go BadDokument19 SeitenWhen Good Alarms Go BadLi QiNoch keine Bewertungen
- Ids Unit-3Dokument22 SeitenIds Unit-3aswinhacker28Noch keine Bewertungen
- Infosys Placement PaperDokument32 SeitenInfosys Placement PaperPrakash JhaNoch keine Bewertungen
- Infosys Placement Papers 01Dokument12 SeitenInfosys Placement Papers 01Prakash JhaNoch keine Bewertungen
- Infosys Placement PaperDokument43 SeitenInfosys Placement PaperGourav NagarNoch keine Bewertungen
- Optimal Halftoning For Network-Based Imaging: Université de MontréalDokument6 SeitenOptimal Halftoning For Network-Based Imaging: Université de MontréalPrakash JhaNoch keine Bewertungen
- Campus Recruitment Notice: T&P CellDokument2 SeitenCampus Recruitment Notice: T&P CellPrakash JhaNoch keine Bewertungen
- 120 Infosys PuzzlesDokument11 Seiten120 Infosys Puzzlesapi-3824713100% (2)
- Prakash Jha: ObjectiveDokument2 SeitenPrakash Jha: ObjectivePrakash JhaNoch keine Bewertungen
- Union Public Service Commission: Dholpur House, Shahjahan Road, New Delhi-110 069Dokument2 SeitenUnion Public Service Commission: Dholpur House, Shahjahan Road, New Delhi-110 069Prakash JhaNoch keine Bewertungen
- Campus Recruitment Notice: T&P CellDokument2 SeitenCampus Recruitment Notice: T&P CellPrakash JhaNoch keine Bewertungen
- Final Whole 10 MBDokument19 SeitenFinal Whole 10 MBPrakash JhaNoch keine Bewertungen
- Clase LM565Dokument4 SeitenClase LM565Prakash JhaNoch keine Bewertungen
- AHEADbook6 5MBDokument241 SeitenAHEADbook6 5MBPrakash JhaNoch keine Bewertungen
- What Is HARTDokument5 SeitenWhat Is HARTsvanjaleNoch keine Bewertungen
- HART - Wikipedia, The Free EncyclopediaDokument3 SeitenHART - Wikipedia, The Free EncyclopediakalyanupdownNoch keine Bewertungen
- Dpharp Hart 5/hart 7 Communication Type (Ejx A, Eja E) : User'S ManualDokument111 SeitenDpharp Hart 5/hart 7 Communication Type (Ejx A, Eja E) : User'S Manual121234 datajktNoch keine Bewertungen
- Manual Transmisor Flujo Mag 50SM1000CDokument91 SeitenManual Transmisor Flujo Mag 50SM1000CCapacitacion TodocatNoch keine Bewertungen
- 5 Hart2 Roc800Dokument6 Seiten5 Hart2 Roc800DSTEFANIENoch keine Bewertungen
- HartDokument10 SeitenHartSandhya RaghunathNoch keine Bewertungen
- Im01c25t01-06en 006Dokument98 SeitenIm01c25t01-06en 006Linx Lux SteiphsNoch keine Bewertungen
- Hart Communication ReportDokument25 SeitenHart Communication ReportMuhammed NizarNoch keine Bewertungen
- Understanding Power of HartDokument3 SeitenUnderstanding Power of HartRidhoillahiNoch keine Bewertungen
- Fisher Fieldvue DVC6200 Digital Valve Controller: Instruction ManualDokument104 SeitenFisher Fieldvue DVC6200 Digital Valve Controller: Instruction ManualShahadat HossainNoch keine Bewertungen
- 5081 A HT ManualDokument112 Seiten5081 A HT ManualKleiber OrtegaNoch keine Bewertungen
- Hart Communicator: Asset Management SolutionsDokument8 SeitenHart Communicator: Asset Management SolutionsSaeed VuNoch keine Bewertungen
- Flowserve MX/QXDokument74 SeitenFlowserve MX/QXMogtaba OsmanNoch keine Bewertungen
- STD 900Dokument16 SeitenSTD 900Diego CondeNoch keine Bewertungen
- DHP UM 015 IHP24 HART User ManualDokument70 SeitenDHP UM 015 IHP24 HART User Manualkumar ambujNoch keine Bewertungen
- HART Communication Protocol Part 1Dokument18 SeitenHART Communication Protocol Part 1Atul SharmaNoch keine Bewertungen
- Chapter 8-HART Device NetworksDokument72 SeitenChapter 8-HART Device NetworkskalajamunNoch keine Bewertungen
- Caution: 3708E SpecificationsDokument149 SeitenCaution: 3708E SpecificationsAntonio CabelloNoch keine Bewertungen
- (英文) HART规范:SPEC 099 hart命令简介 PDFDokument26 Seiten(英文) HART规范:SPEC 099 hart命令简介 PDFvirgil guimanNoch keine Bewertungen
- AI4xI 2 Wire4to20ma HART Manual en US en-USDokument70 SeitenAI4xI 2 Wire4to20ma HART Manual en US en-USHoang Mai HoaNoch keine Bewertungen
- PF HartDokument6 SeitenPF Hartsamim_khNoch keine Bewertungen
- 1sd01325cen 0114Dokument106 Seiten1sd01325cen 0114maryNoch keine Bewertungen
- Manual: HART Multiplexer MasterDokument92 SeitenManual: HART Multiplexer MasterVivek TyagiNoch keine Bewertungen
- Shine TsDokument31 SeitenShine TsSuman GowdaNoch keine Bewertungen
- Instruction Manual Fieldvue Dvc6200 Hw2 Digital Valve Controller en 123052Dokument108 SeitenInstruction Manual Fieldvue Dvc6200 Hw2 Digital Valve Controller en 123052Cautao Cuahang50Noch keine Bewertungen
- Hart Networks 0402Dokument32 SeitenHart Networks 0402Dhiraj KapoorNoch keine Bewertungen
- EI2401 - Industrial Data Networks - 2marksDokument17 SeitenEI2401 - Industrial Data Networks - 2marksSudhar SanNoch keine Bewertungen
- Ti01046den 0920 PDFDokument100 SeitenTi01046den 0920 PDFphyo7799Noch keine Bewertungen
- HCF Spec 160 1.0 PDFDokument23 SeitenHCF Spec 160 1.0 PDFvikulovNoch keine Bewertungen
- Fieldvue DVC5000 Series Digital Valve ControllersDokument131 SeitenFieldvue DVC5000 Series Digital Valve Controllershocine1Noch keine Bewertungen