Das könnte Ihnen auch gefallen
- MCLECTURE20Dokument41 SeitenMCLECTURE20teknikpembakaran2013Noch keine Bewertungen
- MCLECTURE8Dokument44 SeitenMCLECTURE8teknikpembakaran2013Noch keine Bewertungen
- MCLECTURE7Dokument45 SeitenMCLECTURE7teknikpembakaran2013Noch keine Bewertungen
- MCLECTURE5Dokument41 SeitenMCLECTURE5teknikpembakaran2013Noch keine Bewertungen
- Kings: Question BankDokument12 SeitenKings: Question BankdhayasathishNoch keine Bewertungen
- Linear Control Engineering QBDokument11 SeitenLinear Control Engineering QBAkizuki TakaoNoch keine Bewertungen
- MCLECTURE15Dokument40 SeitenMCLECTURE15teknikpembakaran2013Noch keine Bewertungen
- Control SystemsDokument10 SeitenControl SystemsSagaraptor RexNoch keine Bewertungen
- Control Systems Systems and Their Representations Unit-1: Ms. P. Geethanjali Asst. Professor (SR) SelectDokument72 SeitenControl Systems Systems and Their Representations Unit-1: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNoch keine Bewertungen
- IC6501-Control Systems EngineeringDokument16 SeitenIC6501-Control Systems EngineeringrameshsmeNoch keine Bewertungen
- Question Bank: Unit I Systems and Their RepresentationDokument6 SeitenQuestion Bank: Unit I Systems and Their RepresentationramyakalaNoch keine Bewertungen
- CL7101-Control System Design PDFDokument22 SeitenCL7101-Control System Design PDFAyyar KandasamyNoch keine Bewertungen
- CL7101-Control System DesignDokument8 SeitenCL7101-Control System DesigndhineshpNoch keine Bewertungen
- Miscellaneous Systems: Dr. Aaron Don M. AfricaDokument32 SeitenMiscellaneous Systems: Dr. Aaron Don M. AfricaBretBarraquioNoch keine Bewertungen
- EC6405-Control Systems EngineeringDokument12 SeitenEC6405-Control Systems EngineeringAnonymous XhmybK0% (1)
- Rusu Marius Sebastian 2Dokument6 SeitenRusu Marius Sebastian 2Mavy GreenNoch keine Bewertungen
- Answer All Questions: S S S S S H S GDokument1 SeiteAnswer All Questions: S S S S S H S GBIBIN CHIDAMBARANATHANNoch keine Bewertungen
- Digital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediaDokument7 SeitenDigital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediamuthukumartharaniNoch keine Bewertungen
- IC6501-Control Systems EngineeringDokument16 SeitenIC6501-Control Systems EngineeringragupaNoch keine Bewertungen
- Control SystemDokument21 SeitenControl SystemGAkumari0% (1)
- Delft: Matlab and Simulink For Modeling and ControlDokument12 SeitenDelft: Matlab and Simulink For Modeling and Controlawan_krNoch keine Bewertungen
- Lecture 4 - Simple Design Problems: K. J. ÅströmDokument7 SeitenLecture 4 - Simple Design Problems: K. J. ÅströmEdutamNoch keine Bewertungen
- Lecture I - Introduction To PID Control SystemDokument47 SeitenLecture I - Introduction To PID Control SystemR.W. SaputraNoch keine Bewertungen
- Kings: Department of Electronics and Communication EngineeringDokument12 SeitenKings: Department of Electronics and Communication EngineeringLatosha FarrellNoch keine Bewertungen
- Control Syst Test IDokument4 SeitenControl Syst Test IreporterrajiniNoch keine Bewertungen
- Robust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDokument9 SeitenRobust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDr Saba TareqNoch keine Bewertungen
- B.E"/B.Tech. Degree Examination, November/December 2005Dokument3 SeitenB.E"/B.Tech. Degree Examination, November/December 2005vsalaiselvamNoch keine Bewertungen
- Control SystemsDokument8 SeitenControl SystemsammukeeruNoch keine Bewertungen
- Modeling in The Frequency Domain: Prof. Ju-Jang LeeDokument32 SeitenModeling in The Frequency Domain: Prof. Ju-Jang LeeMohammad HassanNoch keine Bewertungen
- EC8391 CS IA2 QB IIIyearDokument4 SeitenEC8391 CS IA2 QB IIIyearOhmsakthi Vel RNoch keine Bewertungen
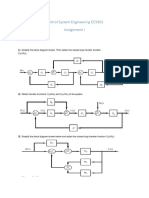
- Control System Engineering EC3301 Assignment I: Practice Following ProblemsDokument2 SeitenControl System Engineering EC3301 Assignment I: Practice Following ProblemsAparajita PanigrahiNoch keine Bewertungen
- Question Paper Code: 55336: B.E./B.Tech. DEGREE EXAMINATIONS, NOV./DEC. 2011 Regulations 2008Dokument4 SeitenQuestion Paper Code: 55336: B.E./B.Tech. DEGREE EXAMINATIONS, NOV./DEC. 2011 Regulations 2008Sarika VadivelanNoch keine Bewertungen
- Modeling and Experimental Validation of A First Order Plant Model: DC Servo MotorDokument17 SeitenModeling and Experimental Validation of A First Order Plant Model: DC Servo Motormeghraj01Noch keine Bewertungen
- Question Paper Code:: Reg. No.Dokument3 SeitenQuestion Paper Code:: Reg. No.VinayNoch keine Bewertungen
- C&i Lab-2019Dokument67 SeitenC&i Lab-2019aniruthNoch keine Bewertungen
- Experiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionDokument12 SeitenExperiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionNimra NoorNoch keine Bewertungen
- Fast Ac Electric Drive Development Process Using Simulink Code Generation PossibilitiesDokument9 SeitenFast Ac Electric Drive Development Process Using Simulink Code Generation Possibilitiesmechernene_aek9037Noch keine Bewertungen
- Control System (PT)Dokument7 SeitenControl System (PT)MATHANKUMAR.SNoch keine Bewertungen
- VI Sem ECEDokument12 SeitenVI Sem ECESenthil Kumar KrishnanNoch keine Bewertungen
- ps3 (1) From MAE 4780Dokument5 Seitenps3 (1) From MAE 4780fooz10Noch keine Bewertungen
- Review of Pole Placement & Pole Zero Cancellation Method For Tuning PID Controller of A Digital Excitation Control SystemDokument10 SeitenReview of Pole Placement & Pole Zero Cancellation Method For Tuning PID Controller of A Digital Excitation Control SystemIJSTENoch keine Bewertungen
- QUESTION BANK of Control Systems Engineering PDFDokument12 SeitenQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaNoch keine Bewertungen
- Project Report DCSDokument51 SeitenProject Report DCSEngr XamirNoch keine Bewertungen
- Sliding Mode Brushless DC Motor Current Torque Control AlgorithmsDokument6 SeitenSliding Mode Brushless DC Motor Current Torque Control Algorithmscarolain_msNoch keine Bewertungen
- Design of A Coffee Vending Machine Using Single Electron DevicesDokument6 SeitenDesign of A Coffee Vending Machine Using Single Electron DevicespntuanhcmNoch keine Bewertungen
- Researches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsDokument4 SeitenResearches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsMaria Gabriela BusteloNoch keine Bewertungen
- Control System Descriptive Type QuestionsDokument2 SeitenControl System Descriptive Type QuestionsAlka Goyal100% (1)
- Control SystemsDokument32 SeitenControl Systemsselvi0412100% (1)
- EEN 407 Sample QuestionsDokument41 SeitenEEN 407 Sample QuestionsAbu SiddiqueNoch keine Bewertungen
- Ee2253 - Control Systems April-May 2010Dokument3 SeitenEe2253 - Control Systems April-May 2010durgabalNoch keine Bewertungen
- Question Paper Code: 11287Dokument5 SeitenQuestion Paper Code: 11287Nishanth NiraiNoch keine Bewertungen
- Transfer FunctionDokument40 SeitenTransfer FunctionLai Yon Peng67% (3)
- 5 Controlled Rectifier DC Drives-Closed Loop - PpsDokument41 Seiten5 Controlled Rectifier DC Drives-Closed Loop - PpsRanjan KumarNoch keine Bewertungen
- Print It 2Dokument5 SeitenPrint It 2shihab4806Noch keine Bewertungen
- Power Systems-On-Chip: Practical Aspects of DesignVon EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNoch keine Bewertungen
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkVon EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNoch keine Bewertungen
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsVon EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNoch keine Bewertungen
- Manajemen Pemasaran - Chapter 5Dokument18 SeitenManajemen Pemasaran - Chapter 5teknikpembakaran2013Noch keine Bewertungen
- MANAJEMEN PEMASARAN - Chapter 1Dokument20 SeitenMANAJEMEN PEMASARAN - Chapter 1teknikpembakaran2013Noch keine Bewertungen
- Manajemen Pemasaran - Chapter 6Dokument15 SeitenManajemen Pemasaran - Chapter 6teknikpembakaran2013Noch keine Bewertungen
- Randolph College Abroad: The World in Britain: 2013-2014 Application ProcedureDokument10 SeitenRandolph College Abroad: The World in Britain: 2013-2014 Application Procedureteknikpembakaran2013Noch keine Bewertungen
- Sample Letter of Application For ScholarshipDokument1 SeiteSample Letter of Application For Scholarshipteknikpembakaran2013Noch keine Bewertungen
- Introduction To Mechatronics Lecture Note: Winter 2002Dokument4 SeitenIntroduction To Mechatronics Lecture Note: Winter 2002teknikpembakaran2013Noch keine Bewertungen
- Part 3 Application Form MSC ScholarhipDokument4 SeitenPart 3 Application Form MSC Scholarhipteknikpembakaran2013Noch keine Bewertungen
- Chapter 7 PDFDokument22 SeitenChapter 7 PDFteknikpembakaran2013Noch keine Bewertungen
- Chapter 6 PDFDokument18 SeitenChapter 6 PDFteknikpembakaran2013Noch keine Bewertungen
- Accident Cost Iceberg PDFDokument1 SeiteAccident Cost Iceberg PDFteknikpembakaran2013Noch keine Bewertungen
- Chapter 10: Flow in Conduits Entrance and Developed FlowsDokument26 SeitenChapter 10: Flow in Conduits Entrance and Developed Flowsteknikpembakaran2013Noch keine Bewertungen
- Chapter 11 PDFDokument16 SeitenChapter 11 PDFteknikpembakaran2013Noch keine Bewertungen
- Responsi 9Dokument4 SeitenResponsi 9teknikpembakaran2013Noch keine Bewertungen
- Chap 4 Sec2 PDFDokument15 SeitenChap 4 Sec2 PDFteknikpembakaran2013Noch keine Bewertungen
- Chapter 2 PDFDokument12 SeitenChapter 2 PDFteknikpembakaran2013Noch keine Bewertungen
- Chapter 5 PDFDokument12 SeitenChapter 5 PDFteknikpembakaran2013Noch keine Bewertungen
- 57:020 Mechanics of Fluids and Transport Processes: Class NotesDokument7 Seiten57:020 Mechanics of Fluids and Transport Processes: Class Notesteknikpembakaran2013Noch keine Bewertungen
- Chap 4 Sec1 PDFDokument15 SeitenChap 4 Sec1 PDFteknikpembakaran2013Noch keine Bewertungen
- Chap 9 Sec1 PDFDokument22 SeitenChap 9 Sec1 PDFteknikpembakaran2013Noch keine Bewertungen
- Chap 3 Sec2 PDFDokument17 SeitenChap 3 Sec2 PDFteknikpembakaran2013Noch keine Bewertungen
- 57:020 Mechanics of Fluids and Transport Processes Chapter 3 Professor Fred Stern Typed by Stephanie Schrader Fall 1999Dokument15 Seiten57:020 Mechanics of Fluids and Transport Processes Chapter 3 Professor Fred Stern Typed by Stephanie Schrader Fall 1999teknikpembakaran2013Noch keine Bewertungen
- Outline Lectures 1 To 10 PDFDokument1 SeiteOutline Lectures 1 To 10 PDFteknikpembakaran2013Noch keine Bewertungen
- Responsi 7Dokument4 SeitenResponsi 7teknikpembakaran2013Noch keine Bewertungen
- Part Three - "Planning and Control"Dokument16 SeitenPart Three - "Planning and Control"teknikpembakaran2013Noch keine Bewertungen
- Jawaban 1. Perkiraan Bentuk Geometri A) Bef Bentuk Geometri: Linier B) BFDokument3 SeitenJawaban 1. Perkiraan Bentuk Geometri A) Bef Bentuk Geometri: Linier B) BFteknikpembakaran2013Noch keine Bewertungen
- German Atv-Dvwk Rules and StandardsDokument25 SeitenGerman Atv-Dvwk Rules and StandardsMehmet Emre Bastopcu100% (1)
- Impact of Advertising On Consumers' Buying Behavior Through Persuasiveness, Brand Image, and Celebrity EndorsementDokument10 SeitenImpact of Advertising On Consumers' Buying Behavior Through Persuasiveness, Brand Image, and Celebrity Endorsementvikram singhNoch keine Bewertungen
- Nama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisDokument2 SeitenNama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisOrionj jrNoch keine Bewertungen
- Appendix - Pcmc2Dokument8 SeitenAppendix - Pcmc2Siva PNoch keine Bewertungen
- Business Plan 3.3Dokument2 SeitenBusiness Plan 3.3Rojin TingabngabNoch keine Bewertungen
- Wilcoxon Matched Pairs Signed Rank TestDokument3 SeitenWilcoxon Matched Pairs Signed Rank TestDawn Ilish Nicole DiezNoch keine Bewertungen
- Electro Fashion Sewable LED Kits WebDokument10 SeitenElectro Fashion Sewable LED Kits WebAndrei VasileNoch keine Bewertungen
- Stearns 87700 Series Parts ListDokument4 SeitenStearns 87700 Series Parts ListYorkistNoch keine Bewertungen
- Hima OPC Server ManualDokument36 SeitenHima OPC Server ManualAshkan Khajouie100% (3)
- Technology Management 1Dokument38 SeitenTechnology Management 1Anu NileshNoch keine Bewertungen
- FMC Derive Price Action GuideDokument50 SeitenFMC Derive Price Action GuideTafara MichaelNoch keine Bewertungen
- Career Level Diagram - V5Dokument1 SeiteCareer Level Diagram - V5Shivani RaikwarNoch keine Bewertungen
- Blue Prism Data Sheet - Provisioning A Blue Prism Database ServerDokument5 SeitenBlue Prism Data Sheet - Provisioning A Blue Prism Database Serverreddy_vemula_praveenNoch keine Bewertungen
- Methods of Recording Retruded Contact Position in Dentate PatientsDokument15 SeitenMethods of Recording Retruded Contact Position in Dentate PatientsYossr MokhtarNoch keine Bewertungen
- Negotiating Skills Negotiating Skills: To Provide You With The Skills To Plan & Implement Successful NegotiationDokument32 SeitenNegotiating Skills Negotiating Skills: To Provide You With The Skills To Plan & Implement Successful NegotiationKanimozhi.SNoch keine Bewertungen
- De Thi Hoc Ki 1 Mon Tieng Anh Lop 5 Co File NgheDokument10 SeitenDe Thi Hoc Ki 1 Mon Tieng Anh Lop 5 Co File Nghetuyen truongNoch keine Bewertungen
- Origami Oso HormigueroDokument9 SeitenOrigami Oso HormigueroRogelio CerdaNoch keine Bewertungen
- Read While Being Blind.. Braille's Alphabet: Be Aware and Active !Dokument3 SeitenRead While Being Blind.. Braille's Alphabet: Be Aware and Active !bitermanNoch keine Bewertungen
- Lecture 4 ENGR 243 DynamicsDokument45 SeitenLecture 4 ENGR 243 DynamicsRobby RebolledoNoch keine Bewertungen
- .Urp 203 Note 2022 - 1642405559000Dokument6 Seiten.Urp 203 Note 2022 - 1642405559000Farouk SalehNoch keine Bewertungen
- Spesifikasi PM710Dokument73 SeitenSpesifikasi PM710Phan'iphan'Noch keine Bewertungen
- ME Eng 8 Q1 0101 - SG - African History and LiteratureDokument13 SeitenME Eng 8 Q1 0101 - SG - African History and Literaturerosary bersanoNoch keine Bewertungen
- 2009 2011 DS Manual - Club Car (001-061)Dokument61 Seiten2009 2011 DS Manual - Club Car (001-061)misaNoch keine Bewertungen
- Richardson Heidegger PDFDokument18 SeitenRichardson Heidegger PDFweltfremdheitNoch keine Bewertungen
- Hdfs Default XML ParametersDokument14 SeitenHdfs Default XML ParametersVinod BihalNoch keine Bewertungen
- Project ManagementDokument11 SeitenProject ManagementBonaventure NzeyimanaNoch keine Bewertungen
- (123doc) - Toefl-Reading-Comprehension-Test-41Dokument8 Seiten(123doc) - Toefl-Reading-Comprehension-Test-41Steve XNoch keine Bewertungen
- Biological Beneficiation of Kaolin: A Review On Iron RemovalDokument8 SeitenBiological Beneficiation of Kaolin: A Review On Iron RemovalValentin GnoumouNoch keine Bewertungen
- My Personal Code of Ethics1Dokument1 SeiteMy Personal Code of Ethics1Princess Angel LucanasNoch keine Bewertungen
- Sindi and Wahab in 18th CenturyDokument9 SeitenSindi and Wahab in 18th CenturyMujahid Asaadullah AbdullahNoch keine Bewertungen