Das könnte Ihnen auch gefallen
- HTML MCQDokument7 SeitenHTML MCQmannanabdulsattarNoch keine Bewertungen
- Write An ALP For All Arithematic Operations and Write ALP For Product of Two Numbers Withoutusing MUL OperationDokument3 SeitenWrite An ALP For All Arithematic Operations and Write ALP For Product of Two Numbers Withoutusing MUL OperationmannanabdulsattarNoch keine Bewertungen
- Server Operating System Windows Hand BookDokument12 SeitenServer Operating System Windows Hand BookmannanabdulsattarNoch keine Bewertungen
- ACA Unit-5Dokument54 SeitenACA Unit-5mannanabdulsattarNoch keine Bewertungen
- ACA UNit 1Dokument29 SeitenACA UNit 1mannanabdulsattarNoch keine Bewertungen
- Data Warehousing and Data Mining - HandbookDokument27 SeitenData Warehousing and Data Mining - Handbookmannanabdulsattar0% (2)
- Gate 2009 CS Answer KeysDokument4 SeitenGate 2009 CS Answer KeysmannanabdulsattarNoch keine Bewertungen
- OS2Dokument2 SeitenOS2mannanabdulsattarNoch keine Bewertungen
- Operating Systems Lab Manual JNTUDokument9 SeitenOperating Systems Lab Manual JNTUmannanabdulsattar100% (1)
- Computer Graphics JNTU Question PaperDokument4 SeitenComputer Graphics JNTU Question PapermannanabdulsattarNoch keine Bewertungen
- Network Directory Has Been Removed: - For HP Workstations (Aegis, Intrepid) - RecommendedDokument3 SeitenNetwork Directory Has Been Removed: - For HP Workstations (Aegis, Intrepid) - RecommendedmannanabdulsattarNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 000 J PQP 50001 001 R0aDokument11 Seiten000 J PQP 50001 001 R0aHerwin MaghinayNoch keine Bewertungen
- Cyberark Skyark Data SheetDokument2 SeitenCyberark Skyark Data SheetSomashekar DharnappagoudarNoch keine Bewertungen
- Pitney BowesDokument15 SeitenPitney BowesPeter Sen Gupta100% (1)
- JNTUA B Tech 2018 3 1 Sup R15 ECE 15A04502 Digital Communication SystemsDokument1 SeiteJNTUA B Tech 2018 3 1 Sup R15 ECE 15A04502 Digital Communication SystemsHarsha NerlapalleNoch keine Bewertungen
- Oscar 3.0 11 2021 DCDokument2 SeitenOscar 3.0 11 2021 DCSebastian RentschNoch keine Bewertungen
- Benchmark - Big Haul Manual.1733Dokument20 SeitenBenchmark - Big Haul Manual.1733James GillenwaterNoch keine Bewertungen
- Nurshath Dulal Wiki, Age, Photos, Height, Family, Net WorthDokument1 SeiteNurshath Dulal Wiki, Age, Photos, Height, Family, Net Worthraf0707066969Noch keine Bewertungen
- Timeline of VideogamesDokument2 SeitenTimeline of VideogamesAnsel GordonNoch keine Bewertungen
- Internship Mechatronics EnglishDokument1 SeiteInternship Mechatronics EnglishHassan KhalilNoch keine Bewertungen
- DL7400 MaintenanceManualDokument157 SeitenDL7400 MaintenanceManualIgor221987100% (1)
- CMT Eh15Dokument50 SeitenCMT Eh15Eletrônica Maia Comércio e ServiçosNoch keine Bewertungen
- Energies 12 00446Dokument35 SeitenEnergies 12 00446Vimal SamNoch keine Bewertungen
- New Features Marvelous Designer 4Dokument45 SeitenNew Features Marvelous Designer 4tiff4ne1100% (1)
- OmniOutliner 4 For Mac User ManualDokument124 SeitenOmniOutliner 4 For Mac User Manualagostino_cirilloNoch keine Bewertungen
- Trends in Transformer ProtectionDokument26 SeitenTrends in Transformer Protectiontashidendup100% (2)
- MP6000 PC v00Dokument262 SeitenMP6000 PC v00Marcio York Cardoso100% (1)
- The Research Proposal CH 1Dokument7 SeitenThe Research Proposal CH 1Kamar FayezNoch keine Bewertungen
- Registration Form in JavaDokument5 SeitenRegistration Form in JavazubairNoch keine Bewertungen
- PV CalculatorDokument18 SeitenPV CalculatorHaroon RasheedNoch keine Bewertungen
- The GD-04 "David" GSM Communicator: Table 1 - A Brief List of Programming SMS InstructionsDokument8 SeitenThe GD-04 "David" GSM Communicator: Table 1 - A Brief List of Programming SMS InstructionsJesús UrrietaNoch keine Bewertungen
- Shunt Capacitor Bank Applications Protection FundamentalsDokument32 SeitenShunt Capacitor Bank Applications Protection Fundamentalsganesamoorthy1987Noch keine Bewertungen
- GX1600 1600e SM Usa Exp Eu Em048n90dDokument46 SeitenGX1600 1600e SM Usa Exp Eu Em048n90dJadi PurwonoNoch keine Bewertungen
- KeralaDokument514 SeitenKeralaGayathriNoch keine Bewertungen
- Lab 3. DHT11Dokument5 SeitenLab 3. DHT11Maten NasradinNoch keine Bewertungen
- Ac LGD User InstructionsDokument2 SeitenAc LGD User InstructionsGaudencio Alberco vilcayauriNoch keine Bewertungen
- Pa MetricsDokument23 SeitenPa MetricsMatt LambieNoch keine Bewertungen
- 00 IntroductionDokument4 Seiten00 Introductionv_doina20023873Noch keine Bewertungen
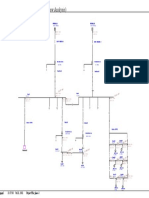
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDokument1 SeiteOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderNoch keine Bewertungen
- Queue Unit3Dokument29 SeitenQueue Unit3sinsinwarnavneet21391Noch keine Bewertungen
- Scrum: The Art of Doing Twice The Work in Half The TimeDokument3 SeitenScrum: The Art of Doing Twice The Work in Half The TimeSyarifudin Zuhri100% (3)