Das könnte Ihnen auch gefallen
- CSEC Mathematics January 2004 P2Dokument15 SeitenCSEC Mathematics January 2004 P2zadie barry100% (4)
- Group DiscussionDokument20 SeitenGroup Discussionsrivan60% (5)
- Group DiscussionDokument20 SeitenGroup Discussionsrivan60% (5)
- Geometry The Khabele School 2015-2016: Problem BookDokument85 SeitenGeometry The Khabele School 2015-2016: Problem BookPrimo100% (1)
- Fundamentals of Alternating CurrentDokument56 SeitenFundamentals of Alternating CurrentSarojBankawatNoch keine Bewertungen
- Rotor-Bearing Dynamics Technology Design Guide Par PDFDokument370 SeitenRotor-Bearing Dynamics Technology Design Guide Par PDFSeethaNoch keine Bewertungen
- Three Axis Rotary PlatformDokument6 SeitenThree Axis Rotary PlatformSudhanwa KulkarniNoch keine Bewertungen
- Complete EDM Handbook - 2Dokument16 SeitenComplete EDM Handbook - 2familyumaNoch keine Bewertungen
- Masonry Bridge Assessment With Archie-M: Notes For A Masonry Bridge Masterclass Bill Harvey Associates LTD March 2011Dokument12 SeitenMasonry Bridge Assessment With Archie-M: Notes For A Masonry Bridge Masterclass Bill Harvey Associates LTD March 2011Info Aviron LavalNoch keine Bewertungen
- 5 - G-CodeDokument55 Seiten5 - G-CodefamilyumaNoch keine Bewertungen
- Word SearchDokument7 SeitenWord SearchPevjepNoch keine Bewertungen
- Makalah Line Tracking Robot (By Opick Hidayato)Dokument36 SeitenMakalah Line Tracking Robot (By Opick Hidayato)Opick HidayatoNoch keine Bewertungen
- Masrianna HarahapDokument4 SeitenMasrianna HarahapMasrianna HarahapNoch keine Bewertungen
- Contoh Studi Kasus Decision TreeDokument7 SeitenContoh Studi Kasus Decision TreeAmalia UtamiNoch keine Bewertungen
- SASDokument8 SeitenSASYunita ArdillaNoch keine Bewertungen
- TOEFLDokument2 SeitenTOEFLElvira Eka RamadhaniNoch keine Bewertungen
- 15 Contoh Aplikasi Genetic Algorithm Dalam Dunia NyataDokument9 Seiten15 Contoh Aplikasi Genetic Algorithm Dalam Dunia NyataSupriyanto, M.Kom100% (1)
- English Interactive Program: Passive, Noun, Relative PronounDokument45 SeitenEnglish Interactive Program: Passive, Noun, Relative PronounRidaIkrarPrasetyoNoch keine Bewertungen
- W3school SQL QuizDokument4 SeitenW3school SQL QuizUmar Syahid As ShidiqNoch keine Bewertungen
- Kalkulus: IntegralDokument240 SeitenKalkulus: Integralsvitri94Noch keine Bewertungen
- Pengumuman SBMPTN Uho 2021Dokument6 SeitenPengumuman SBMPTN Uho 2021MUH.ASRUDINNoch keine Bewertungen
- Portofolio 2023 JanuaryDokument31 SeitenPortofolio 2023 JanuaryAgung MillenienbunNoch keine Bewertungen
- Identifikasi Tipe Awan ISCCP Modis PDFDokument12 SeitenIdentifikasi Tipe Awan ISCCP Modis PDFEmil TengwarNoch keine Bewertungen
- Windows 10 IoDokument30 SeitenWindows 10 IoIsmi Rizki SopiyantiNoch keine Bewertungen
- Belajar TpeicDokument2 SeitenBelajar TpeicMaulida KatrinaNoch keine Bewertungen
- Statistika Spasial (Spatial Statistics) : Sutikno - Jurusan Statistika FMIPA ITSDokument39 SeitenStatistika Spasial (Spatial Statistics) : Sutikno - Jurusan Statistika FMIPA ITSRarass AnashyNoch keine Bewertungen
- UNIT 2 A Typical PCDokument8 SeitenUNIT 2 A Typical PCNurul Fadilah Nainanda Putri Chaniago100% (1)
- Tugas Dasar DigitalDokument22 SeitenTugas Dasar DigitalMaya Syarah RitongaNoch keine Bewertungen
- Summary TestDokument6 SeitenSummary TestNandar JhonNoch keine Bewertungen
- CONTOH - Soal UAS Sistem Informasi IndustriDokument1 SeiteCONTOH - Soal UAS Sistem Informasi IndustriRudini MulyaNoch keine Bewertungen
- Fathanmubina Laprak Bab8Dokument9 SeitenFathanmubina Laprak Bab8Fathan MubinaNoch keine Bewertungen
- Alat Seismograf Micro EarthquakeDokument4 SeitenAlat Seismograf Micro EarthquakedeadromeoNoch keine Bewertungen
- What Is The Difference Between Cross Cable and Straight CableDokument7 SeitenWhat Is The Difference Between Cross Cable and Straight CablePatricia Blanca RamosNoch keine Bewertungen
- Jurnal Model SpiralDokument11 SeitenJurnal Model SpiralVendola YolandaNoch keine Bewertungen
- Soal LatihanDokument2 SeitenSoal LatihanGebyNoch keine Bewertungen
- UTS, Matematika Teknik, 8 Oct 2019 PDFDokument2 SeitenUTS, Matematika Teknik, 8 Oct 2019 PDFYenieldima PasaribuNoch keine Bewertungen
- Coding Program Java Bank NasabahDokument6 SeitenCoding Program Java Bank NasabahAris Mastri LNoch keine Bewertungen
- Normalisasi HotelDokument3 SeitenNormalisasi HotelVyan Ary PratamaNoch keine Bewertungen
- Bank System Use CaseDokument1 SeiteBank System Use CaseMumandam LynetteNoch keine Bewertungen
- Kunci-Jawaban Howard AntonDokument41 SeitenKunci-Jawaban Howard AntonAlyagariniNoch keine Bewertungen
- Ebook Jaringan Komputer II Created by AgDokument86 SeitenEbook Jaringan Komputer II Created by AgMahendra putra RaharjaNoch keine Bewertungen
- Nugroho Syahputra - TOEFL Exercise 6 (Where Questions)Dokument6 SeitenNugroho Syahputra - TOEFL Exercise 6 (Where Questions)NET BINARYNoch keine Bewertungen
- Ruang LingkupDokument38 SeitenRuang LingkupaisyNoch keine Bewertungen
- Unit 11 Apartments HousesDokument2 SeitenUnit 11 Apartments HousesBrahan karimNoch keine Bewertungen
- Robot Dynamics - Newton - Euler Recursive ApproachP3Dokument27 SeitenRobot Dynamics - Newton - Euler Recursive ApproachP3Dao YanNoch keine Bewertungen
- Introduction To ROBOTICS: Velocity Analysis JacobianDokument32 SeitenIntroduction To ROBOTICS: Velocity Analysis Jacobianal7123Noch keine Bewertungen
- Stochastic Structural Dynamics Lecture-12: Random Vibrations of Sdof Systems-4Dokument47 SeitenStochastic Structural Dynamics Lecture-12: Random Vibrations of Sdof Systems-4Kajal KhanNoch keine Bewertungen
- 1.basic 2D & 3D TransformationDokument77 Seiten1.basic 2D & 3D TransformationPooja SinghNoch keine Bewertungen
- 4 Node QuadDokument27 Seiten4 Node QuadMathiew EstephoNoch keine Bewertungen
- Root Finding:: X X D D X X D X XDokument3 SeitenRoot Finding:: X X D D X X D X Xyana22Noch keine Bewertungen
- MAM2085F 2013 Exam SolutionsDokument8 SeitenMAM2085F 2013 Exam Solutionsmoro1992Noch keine Bewertungen
- Chpt05-FEM For 2D SolidsnewDokument56 SeitenChpt05-FEM For 2D SolidsnewKrishna MyakalaNoch keine Bewertungen
- Al Stge CHE 411 Separation Processes II First Semester 1429/1430 H-2008/2009G AbsorptionDokument8 SeitenAl Stge CHE 411 Separation Processes II First Semester 1429/1430 H-2008/2009G AbsorptionrockeygreatNoch keine Bewertungen
- Constant Strain Triangle (CST) : BY R.PONNUSAMY (2008528)Dokument33 SeitenConstant Strain Triangle (CST) : BY R.PONNUSAMY (2008528)hariharanveerannanNoch keine Bewertungen
- Linearna Algebra - Rjesenja, ETFDokument44 SeitenLinearna Algebra - Rjesenja, ETFmarkovukNoch keine Bewertungen
- Z Transform and It's ApplicationsDokument11 SeitenZ Transform and It's Applicationsলাজ মাহমুদNoch keine Bewertungen
- 6345 Notes31Dokument43 Seiten6345 Notes31hillnerNoch keine Bewertungen
- Name of The Student: Branch:: Engineering Mathematics Material 2010Dokument13 SeitenName of The Student: Branch:: Engineering Mathematics Material 2010krrmallikaNoch keine Bewertungen
- Show All Solutions and Enclose All Final Answers.: T T T XT T TDokument1 SeiteShow All Solutions and Enclose All Final Answers.: T T T XT T TAnna Karissa PerezNoch keine Bewertungen
- f (x) f (0) x lim lim 1 x0 x f (x) f (0) x lim lim 1 x0 x y Μ (ξ,f (ξ) ) Β (β,f (β) ) Α (α,f (α) )Dokument4 Seitenf (x) f (0) x lim lim 1 x0 x f (x) f (0) x lim lim 1 x0 x y Μ (ξ,f (ξ) ) Β (β,f (β) ) Α (α,f (α) )margkosNoch keine Bewertungen
- MATLAB FormulasDokument3 SeitenMATLAB FormulasRoberto Alessandro IonescuNoch keine Bewertungen
- Introduction To ROBOTICS: Inverse Kinematics Jacobian Matrix Trajectory PlanningDokument34 SeitenIntroduction To ROBOTICS: Inverse Kinematics Jacobian Matrix Trajectory PlanningMohammad Emran RusliNoch keine Bewertungen
- Introduction To ROBOTICS: Inverse Kinematics Jacobian Matrix Trajectory PlanningDokument34 SeitenIntroduction To ROBOTICS: Inverse Kinematics Jacobian Matrix Trajectory PlanningChernet TugeNoch keine Bewertungen
- CSTDokument33 SeitenCSTVasthadu Vasu KannahNoch keine Bewertungen
- Mid IDokument11 SeitenMid IpassmefoolNoch keine Bewertungen
- Cos Sin Sin Cos - . - . Cos Sin Sin Cos .Dokument20 SeitenCos Sin Sin Cos - . - . Cos Sin Sin Cos .sssudhansuNoch keine Bewertungen
- Q. 1: For The Rectangular Element Shown in The Figure Obtain The Coefficient MatrixDokument6 SeitenQ. 1: For The Rectangular Element Shown in The Figure Obtain The Coefficient MatrixVivek HarrisNoch keine Bewertungen
- Movie Segment: InstantaneousDokument9 SeitenMovie Segment: Instantaneousrehan_sadiq1991Noch keine Bewertungen
- Mechanics of Solids Week 13 LecturesDokument8 SeitenMechanics of Solids Week 13 LecturesFlynn GouldNoch keine Bewertungen
- Ath em Ati CS: L.K .SH Arm ADokument8 SeitenAth em Ati CS: L.K .SH Arm APremNoch keine Bewertungen
- Ex. No. 10 Date: Model and NC Code Generation For Simple Profile Using Milling OperationDokument5 SeitenEx. No. 10 Date: Model and NC Code Generation For Simple Profile Using Milling Operationfamilyuma0% (1)
- Syllabus Me0423 - Computer Aided Manufacturing Laboratory: PurposeDokument10 SeitenSyllabus Me0423 - Computer Aided Manufacturing Laboratory: PurposefamilyumaNoch keine Bewertungen
- 2 PDFDokument7 Seiten2 PDFfamilyumaNoch keine Bewertungen
- 1Dokument9 Seiten1familyumaNoch keine Bewertungen
- Cam 2 ATCDokument18 SeitenCam 2 ATCfamilyumaNoch keine Bewertungen
- Metal FormingDokument17 SeitenMetal FormingfamilyumaNoch keine Bewertungen
- Master CamDokument87 SeitenMaster CamfamilyumaNoch keine Bewertungen
- 7 Shpaper PlanerDokument29 Seiten7 Shpaper PlanerfamilyumaNoch keine Bewertungen
- Unit7 Nan PDFDokument56 SeitenUnit7 Nan PDFAnonymous L7XrxpeI1zNoch keine Bewertungen
- Electrical DischargeDokument3 SeitenElectrical DischargeRipper JackNoch keine Bewertungen
- ThesisDokument60 SeitenThesisfamilyumaNoch keine Bewertungen
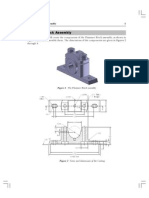
- Plummer Block AssemblyDokument2 SeitenPlummer Block Assemblyaksundarm531Noch keine Bewertungen
- Rapid ToolingDokument19 SeitenRapid ToolingSunny GaekwadNoch keine Bewertungen
- Study On Parametric Optimization of Fused Deposition Modelling (FDM) ProcessDokument207 SeitenStudy On Parametric Optimization of Fused Deposition Modelling (FDM) ProcessfamilyumaNoch keine Bewertungen
- Rapid Prototyping 3d PrintingDokument21 SeitenRapid Prototyping 3d PrintingfamilyumaNoch keine Bewertungen
- Design and Fabrication of Multimaterial Flexible Mechanisms With Embedded ComponentsDokument146 SeitenDesign and Fabrication of Multimaterial Flexible Mechanisms With Embedded ComponentsfamilyumaNoch keine Bewertungen
- A Preliminary Research On Development of A Fiber-Composite, Curved FDM SystemDokument96 SeitenA Preliminary Research On Development of A Fiber-Composite, Curved FDM SystemfamilyumaNoch keine Bewertungen
- Cad CamDokument63 SeitenCad CamfamilyumaNoch keine Bewertungen
- Numerical ControlDokument30 SeitenNumerical ControlKeshav AroteNoch keine Bewertungen
- 1 MatlabReviewDokument59 Seiten1 MatlabReviewfamilyumaNoch keine Bewertungen
- Lab02 Simulink TutorialDokument36 SeitenLab02 Simulink Tutorialkok_oc25Noch keine Bewertungen
- Fuzzy Logic Using MatlabDokument85 SeitenFuzzy Logic Using MatlabVehid TavakolNoch keine Bewertungen
- Storey DecisionTreesDokument38 SeitenStorey DecisionTreesfamilyumaNoch keine Bewertungen
- Decision MakingDokument10 SeitenDecision Makingashok2009csNoch keine Bewertungen
- 01a Decision MakingDokument45 Seiten01a Decision MakingfamilyumaNoch keine Bewertungen
- M.E-CSE Anna UniversityDokument25 SeitenM.E-CSE Anna UniversityPushparaj KaruNoch keine Bewertungen
- Differential Surface VectorsDokument3 SeitenDifferential Surface VectorsJohn DoeNoch keine Bewertungen
- Vector Calculus 1Dokument15 SeitenVector Calculus 1AndreaMiccaBautistaNoch keine Bewertungen
- Capitulo3 Gillat PDFDokument8 SeitenCapitulo3 Gillat PDFluis fernando riojas pecheNoch keine Bewertungen
- Thomson 2006Dokument5 SeitenThomson 2006Patrícia PerezNoch keine Bewertungen
- Math3974 2004 ExamDokument5 SeitenMath3974 2004 ExamMarcus LiNoch keine Bewertungen
- EGP MergedDokument1.300 SeitenEGP MergedTuiã LinharesNoch keine Bewertungen
- Outline PHY1023H Weeks 1-7Dokument2 SeitenOutline PHY1023H Weeks 1-7sivuyisoNoch keine Bewertungen
- Lesson Plan Intro To VectorsDokument2 SeitenLesson Plan Intro To VectorsspreemouseNoch keine Bewertungen
- The Generalised Constrained Finite Strip Method For Thin-Walled, Prismatic Members Under Applied ShearDokument35 SeitenThe Generalised Constrained Finite Strip Method For Thin-Walled, Prismatic Members Under Applied ShearSimon TileNoch keine Bewertungen
- Acceleration in Slider Crank MechanismDokument8 SeitenAcceleration in Slider Crank MechanismSalah benhsNoch keine Bewertungen
- Space Transport: Engineering Methods - Draft - 29 Jul 2012Dokument253 SeitenSpace Transport: Engineering Methods - Draft - 29 Jul 2012Edward RhodesNoch keine Bewertungen
- 12 Math CH-7 Exercise 7.1Dokument10 Seiten12 Math CH-7 Exercise 7.1John EliaNoch keine Bewertungen
- Kinetics of ParticlesDokument29 SeitenKinetics of ParticlesIjal Haizal100% (1)
- Automated High Precision Optical Tracking of Flying Objects: Master ThesisDokument45 SeitenAutomated High Precision Optical Tracking of Flying Objects: Master ThesisSteve WilsonNoch keine Bewertungen
- Learning Strand - Set GDokument49 SeitenLearning Strand - Set GJudson Wycliffe L. Jurolan100% (1)
- Chapter 9. Vector GeometryDokument108 SeitenChapter 9. Vector GeometryAnhNoch keine Bewertungen
- 11th Class PhysicsDokument73 Seiten11th Class PhysicsRishabh SharmaNoch keine Bewertungen
- Indicial ConventionDokument17 SeitenIndicial Conventionsubhash1688Noch keine Bewertungen
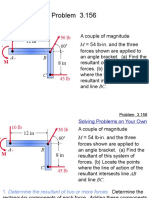
- Problem 3.156: 30 LB 10 LBDokument7 SeitenProblem 3.156: 30 LB 10 LBCurt De CastroNoch keine Bewertungen
- Saint Paul University Philippines Tuguegarao CityDokument7 SeitenSaint Paul University Philippines Tuguegarao CityGeremy Justine BonifacioNoch keine Bewertungen
- HyperView 8.0 User's GuideDokument184 SeitenHyperView 8.0 User's GuideLaique AhmedNoch keine Bewertungen
- EnlargementFromPastPapers 3Dokument6 SeitenEnlargementFromPastPapers 3Shereen Fiza100% (1)
- Comparison of Models For Estimating Magnetic Core Losses in Electrical Machines Using The Finite-Element MethodDokument10 SeitenComparison of Models For Estimating Magnetic Core Losses in Electrical Machines Using The Finite-Element MethodSuda KrishnarjunaraoNoch keine Bewertungen
- GitHub - NatronGitHub - Natron-Plugins - Natron Community PluginsDokument1 SeiteGitHub - NatronGitHub - Natron-Plugins - Natron Community PluginsWibiNoch keine Bewertungen