Das könnte Ihnen auch gefallen
- Principles of Communication - Iit Madras Lecture MaterialDokument501 SeitenPrinciples of Communication - Iit Madras Lecture MaterialNikhil Verma100% (4)
- Fourier TransformDokument19 SeitenFourier TransformBasim Brohi100% (1)
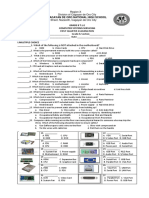
- TLE 8 Exploratory Computer System Servicing 1st Quarter ExamDokument3 SeitenTLE 8 Exploratory Computer System Servicing 1st Quarter ExamRubylinda100% (10)
- DSP 2 MaarksDokument30 SeitenDSP 2 MaarksThiagu RajivNoch keine Bewertungen
- Software Defined Radio Lec 3 - RF Front-End For SDR: Sajjad Hussain, Mcs-NustDokument40 SeitenSoftware Defined Radio Lec 3 - RF Front-End For SDR: Sajjad Hussain, Mcs-NustAamir HabibNoch keine Bewertungen
- Signals and SystemsDokument22 SeitenSignals and Systemsvnrao61Noch keine Bewertungen
- Frequency Domain ProcessingDokument42 SeitenFrequency Domain ProcessingInJune YeoNoch keine Bewertungen
- Pulse ModulationDokument38 SeitenPulse ModulationMr. Ravi Rameshbhai PatelNoch keine Bewertungen
- Ch7 FourierTransform Continuous-Time Signal AnalysisDokument43 SeitenCh7 FourierTransform Continuous-Time Signal AnalysisNat RajNoch keine Bewertungen
- Ffus10-1g1io Flow SensorDokument12 SeitenFfus10-1g1io Flow SensorsujingthetNoch keine Bewertungen
- Agilent Ads Training Course PDFDokument7 SeitenAgilent Ads Training Course PDFAamir HabibNoch keine Bewertungen
- Ec 1361 - Digital Signal ProcessingDokument16 SeitenEc 1361 - Digital Signal ProcessingEleazar PaclibarNoch keine Bewertungen
- Linear Time Variant ChannelDokument38 SeitenLinear Time Variant ChannelindameantimeNoch keine Bewertungen
- DSP-7 (Multirate) (S)Dokument58 SeitenDSP-7 (Multirate) (S)Jyothi JoNoch keine Bewertungen
- Digital Signal Processing Short Question and AnswersDokument32 SeitenDigital Signal Processing Short Question and AnswersRachit Nema88% (8)
- Lec 3 MSC Dcs - Fall 2013Dokument72 SeitenLec 3 MSC Dcs - Fall 2013Basir UsmanNoch keine Bewertungen
- PHYS 352: ReferenceDokument8 SeitenPHYS 352: ReferencemasmoxNoch keine Bewertungen
- Lecture 2Dokument26 SeitenLecture 2Ahmed Diaa AlwakilNoch keine Bewertungen
- Discrete-Time Fourier Analysis Discrete-Time Fourier AnalysisDokument37 SeitenDiscrete-Time Fourier Analysis Discrete-Time Fourier AnalysisTrần Ngọc LâmNoch keine Bewertungen
- Ch2 Fundamentals 2013Dokument16 SeitenCh2 Fundamentals 2013Mark MaoNoch keine Bewertungen
- Chapter No.1Dokument53 SeitenChapter No.1sohaibNoch keine Bewertungen
- PSD LabDokument7 SeitenPSD LabAsim MazinNoch keine Bewertungen
- Nptel AssignmentDokument3 SeitenNptel AssignmentPalani ArjunanNoch keine Bewertungen
- 5.2 Fundamentals of Equalization: Wireless Communications 104Dokument2 Seiten5.2 Fundamentals of Equalization: Wireless Communications 104Soumitra BhowmickNoch keine Bewertungen
- Digital Communication SystemsDokument53 SeitenDigital Communication SystemsVijay KumarNoch keine Bewertungen
- Signal ProcessingDokument40 SeitenSignal ProcessingSamson MumbaNoch keine Bewertungen
- Analog Digital Communication:: Modulation, Demodulation and CodingDokument16 SeitenAnalog Digital Communication:: Modulation, Demodulation and CodingAli AhmadNoch keine Bewertungen
- Digital Signal & Image Processing B Option - 8 Lectures: Stephen Roberts Sjrob@robots - Ox.ac - UkDokument172 SeitenDigital Signal & Image Processing B Option - 8 Lectures: Stephen Roberts Sjrob@robots - Ox.ac - UkDotressus MmokNoch keine Bewertungen
- Complexbaseband Representation of Bandpass SignalsDokument18 SeitenComplexbaseband Representation of Bandpass SignalsSrinivas KrishnaNoch keine Bewertungen
- Random Processes:temporal CharacteristicsDokument7 SeitenRandom Processes:temporal CharacteristicsRamakrishnaVakulabharanam0% (1)
- Power Spectral Density - The Basics: T X T X E RDokument7 SeitenPower Spectral Density - The Basics: T X T X E RlucaspadialNoch keine Bewertungen
- L14: Random ProcessesDokument13 SeitenL14: Random ProcessesHunter VerneNoch keine Bewertungen
- Fitz BandpassDokument41 SeitenFitz BandpassJoshua D JohnNoch keine Bewertungen
- Notes On Phasors: 1.1 Time-Harmonic Physical QuantitiesDokument11 SeitenNotes On Phasors: 1.1 Time-Harmonic Physical QuantitiesonezimocardosoNoch keine Bewertungen
- Lucr3 DT 11 12 2020Dokument13 SeitenLucr3 DT 11 12 2020ArmaGhedoNNoch keine Bewertungen
- Fundamentals of The Discrete Fourier Transform: XF Xte DTDokument8 SeitenFundamentals of The Discrete Fourier Transform: XF Xte DTho-faNoch keine Bewertungen
- NOTES 99-4 Bandwidth, Frequency Response, and Capacity of Communication LinksDokument13 SeitenNOTES 99-4 Bandwidth, Frequency Response, and Capacity of Communication LinksengrkskNoch keine Bewertungen
- ADSPT Lab5Dokument4 SeitenADSPT Lab5Rupesh SushirNoch keine Bewertungen
- Fast Fourier Transform (FFT) : The FFT in One Dimension The FFT in Multiple DimensionsDokument10 SeitenFast Fourier Transform (FFT) : The FFT in One Dimension The FFT in Multiple Dimensionsİsmet BurgaçNoch keine Bewertungen
- Lab 3 PSDDokument7 SeitenLab 3 PSDhusseinelatarNoch keine Bewertungen
- Appendix 3: General Notions Regarding The Diagnosis of The Functioning State of Machine ToolsDokument40 SeitenAppendix 3: General Notions Regarding The Diagnosis of The Functioning State of Machine ToolsNikhil ThakurNoch keine Bewertungen
- Modal Testing FRFDokument76 SeitenModal Testing FRFSuresh KumarNoch keine Bewertungen
- The Discrete-Time Fourier Transform: 44 MinutesDokument9 SeitenThe Discrete-Time Fourier Transform: 44 Minutesapi-127299018Noch keine Bewertungen
- Wiener - Khinchin.Theorem Signals&SystemsDokument2 SeitenWiener - Khinchin.Theorem Signals&SystemsNandagopal SivakumarNoch keine Bewertungen
- Random VibrationsDokument18 SeitenRandom VibrationsSumeet GhodkeNoch keine Bewertungen
- Lab2-Spectral Analysis in MatlabDokument14 SeitenLab2-Spectral Analysis in MatlabindameantimeNoch keine Bewertungen
- High Pass FilteringDokument65 SeitenHigh Pass Filteringgodidet305Noch keine Bewertungen
- ECE 420 Digital Communications: Lecture #3Dokument40 SeitenECE 420 Digital Communications: Lecture #3Saam HereNoch keine Bewertungen
- DSP LecturesDokument154 SeitenDSP LecturesSanjeev GhanghashNoch keine Bewertungen
- Fundamentals of Noise: V.Vasudevan, Department of Electrical Engineering, Indian Institute of Technology MadrasDokument24 SeitenFundamentals of Noise: V.Vasudevan, Department of Electrical Engineering, Indian Institute of Technology MadrasSeham RaheelNoch keine Bewertungen
- Lecture #5, Fall 2003: ECE 6602 Digital CommunicationsDokument12 SeitenLecture #5, Fall 2003: ECE 6602 Digital Communicationsshakr123Noch keine Bewertungen
- Ch2 ASampling2024Dokument40 SeitenCh2 ASampling2024ansvn2 mathNoch keine Bewertungen
- Impulse Response:: δ (t) δ (n) h (t) h (n)Dokument3 SeitenImpulse Response:: δ (t) δ (n) h (t) h (n)nazmulNoch keine Bewertungen
- Continuous-Time Signals and SystemsDokument37 SeitenContinuous-Time Signals and SystemsAbeer HaddadNoch keine Bewertungen
- 2022 Lec 01bDokument24 Seiten2022 Lec 01bMuskan KapoorNoch keine Bewertungen
- PSDDokument5 SeitenPSDsimbiont100% (1)
- AC Asg 1 - 16Dokument2 SeitenAC Asg 1 - 16HArshithNoch keine Bewertungen
- DC 04 Signal&SystemDokument163 SeitenDC 04 Signal&SystemSantiago FernandoNoch keine Bewertungen
- Power Signals:: Versão: 1.0 Prof. Rui DinisDokument11 SeitenPower Signals:: Versão: 1.0 Prof. Rui DinisSandeep TewariNoch keine Bewertungen
- HST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingDokument27 SeitenHST.582J / 6.555J / 16.456J Biomedical Signal and Image Processingtoo_minNoch keine Bewertungen
- FilterDokument14 SeitenFilterHaritsari DewiNoch keine Bewertungen
- BEKC 2433 Chapter 4 - Fourier TransformsDokument49 SeitenBEKC 2433 Chapter 4 - Fourier TransformsAdam SaufiNoch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsVon EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNoch keine Bewertungen
- Directional AntennasDokument23 SeitenDirectional AntennasAamir HabibNoch keine Bewertungen
- Antenna and Propagation: Planar Antennas Patch / SlotDokument32 SeitenAntenna and Propagation: Planar Antennas Patch / SlotAamir HabibNoch keine Bewertungen
- MORL (Multiple Objective Reinforcement Learning)Dokument152 SeitenMORL (Multiple Objective Reinforcement Learning)Aamir HabibNoch keine Bewertungen
- 5G BBWF Mike Wright Oct 2013Dokument6 Seiten5G BBWF Mike Wright Oct 2013Aamir HabibNoch keine Bewertungen
- Nokia Looking Ahead To 5G WhitePaper July 2014Dokument16 SeitenNokia Looking Ahead To 5G WhitePaper July 2014Aamir HabibNoch keine Bewertungen
- VI-03 Minimum Variance Method - 2007Dokument17 SeitenVI-03 Minimum Variance Method - 2007Aamir HabibNoch keine Bewertungen
- 5G Channel Sounding, Reference Solution: Keysight TechnologiesDokument10 Seiten5G Channel Sounding, Reference Solution: Keysight TechnologiesAamir HabibNoch keine Bewertungen
- GR TutorialDokument79 SeitenGR TutorialAamir HabibNoch keine Bewertungen
- Software Defined Radio Handbook: Eighth EditionDokument53 SeitenSoftware Defined Radio Handbook: Eighth EditionAamir HabibNoch keine Bewertungen
- Qex 1Dokument9 SeitenQex 1Aamir HabibNoch keine Bewertungen
- Systemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammDokument26 SeitenSystemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammAamir HabibNoch keine Bewertungen
- Lecture #2 Digital Communications EE 725Dokument33 SeitenLecture #2 Digital Communications EE 725Aamir HabibNoch keine Bewertungen
- An Introduction To Software Defined Radio For Microwave EngineersDokument1 SeiteAn Introduction To Software Defined Radio For Microwave EngineersAamir HabibNoch keine Bewertungen
- Spectrum Access and SharingDokument38 SeitenSpectrum Access and SharingAamir HabibNoch keine Bewertungen
- Defining Cognitive RadioDokument15 SeitenDefining Cognitive RadioAamir HabibNoch keine Bewertungen
- Spectrum Sensing and IdentificationDokument27 SeitenSpectrum Sensing and IdentificationAamir HabibNoch keine Bewertungen
- Tinyos Lab: Lesson 04: Sensing: WSN Programming CourseDokument8 SeitenTinyos Lab: Lesson 04: Sensing: WSN Programming CourseAamir HabibNoch keine Bewertungen
- Fuzzy Based Landslide Prediction Using Wireless Sensor NetworksDokument19 SeitenFuzzy Based Landslide Prediction Using Wireless Sensor NetworksAamir HabibNoch keine Bewertungen
- Ad Hoc and Sensor Networks CH 8Dokument46 SeitenAd Hoc and Sensor Networks CH 8Aamir HabibNoch keine Bewertungen
- Tinyos Lab: Lesson 03: Radio Communication: WSN Programming CourseDokument7 SeitenTinyos Lab: Lesson 03: Radio Communication: WSN Programming CourseAamir HabibNoch keine Bewertungen
- Blackcore Raptor Lake Spec SheetDokument3 SeitenBlackcore Raptor Lake Spec SheetNadendla mastan raoNoch keine Bewertungen
- Qos Taxonomy Towards Wireless Body Area Network Solutions: Volume 2, Issue 4, April 2013Dokument14 SeitenQos Taxonomy Towards Wireless Body Area Network Solutions: Volume 2, Issue 4, April 2013International Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Timing and Control UnitDokument22 SeitenTiming and Control Unitaditya88_4u0% (1)
- Current Transducer LT 100-P I 100 ADokument3 SeitenCurrent Transducer LT 100-P I 100 AVinicius ReisNoch keine Bewertungen
- JW24F - JOYWARRIOR Datasheet - 01Dokument15 SeitenJW24F - JOYWARRIOR Datasheet - 01Angelito Dela CruzNoch keine Bewertungen
- Digital Data Transmission: ECE 457 Spring 2005Dokument23 SeitenDigital Data Transmission: ECE 457 Spring 2005hiltonNoch keine Bewertungen
- CHAPTER 1-Introduction To Computer (Module)Dokument19 SeitenCHAPTER 1-Introduction To Computer (Module)NSBMRNoch keine Bewertungen
- Cnpilot E410Dokument3 SeitenCnpilot E410Irfan Haris100% (1)
- THC1604009 - Informasi Harga CR Vita & DV5700 CR Classic & DV5950 President University Medical Center 12 April 2016Dokument9 SeitenTHC1604009 - Informasi Harga CR Vita & DV5700 CR Classic & DV5950 President University Medical Center 12 April 2016ResaNoch keine Bewertungen
- Biostar IH61D-MHS DDR3 Socket 1155Dokument47 SeitenBiostar IH61D-MHS DDR3 Socket 1155nguyenNoch keine Bewertungen
- Product Description: Digital XENSIV Barometric Pressure SensorDokument44 SeitenProduct Description: Digital XENSIV Barometric Pressure Sensorsupendra phuyalNoch keine Bewertungen
- 1982 NEC Microcomputer CatalogDokument756 Seiten1982 NEC Microcomputer CatalogPrzemysław WójcikNoch keine Bewertungen
- Kick NEKXA Buds Z10 User ManualDokument1 SeiteKick NEKXA Buds Z10 User ManualllaonunNoch keine Bewertungen
- Model Name: GA-P61-S3-B3: Vcore Cpu - VTTDokument34 SeitenModel Name: GA-P61-S3-B3: Vcore Cpu - VTTANH TUANNoch keine Bewertungen
- Steval-Isa137V1: Demonstration Board Based On Viper06 From The Fixed-Frequency Viper™ Plus FamilyDokument4 SeitenSteval-Isa137V1: Demonstration Board Based On Viper06 From The Fixed-Frequency Viper™ Plus FamilyalperusluNoch keine Bewertungen
- Design of A 10 W High-Efficiency Balanced Power Amplifier Using A Combination of Load-Pull and Load-Line Methods For ISM BandDokument13 SeitenDesign of A 10 W High-Efficiency Balanced Power Amplifier Using A Combination of Load-Pull and Load-Line Methods For ISM BandmahdiNoch keine Bewertungen
- An Introduction To Error-Correcting Codes: The Virtues of RedundancyDokument38 SeitenAn Introduction To Error-Correcting Codes: The Virtues of RedundancyKrish Cs20Noch keine Bewertungen
- Map Series Power Meter Ac Detector Adaptors Selection Guides enDokument11 SeitenMap Series Power Meter Ac Detector Adaptors Selection Guides enEduardo PentaxNoch keine Bewertungen
- 12C509Dokument85 Seiten12C509Choco MalaNoch keine Bewertungen
- Fleps23 CFP Web 03 E9038f7b56Dokument1 SeiteFleps23 CFP Web 03 E9038f7b56Shranish KarNoch keine Bewertungen
- Twisted Pair, Coaxial Cable, Optical FiberDokument34 SeitenTwisted Pair, Coaxial Cable, Optical Fiber7t854s6wd2Noch keine Bewertungen
- Table 114: Descriptions of 3TX RF Modules Flexi Multiradio BTS RF Module and Remote Radio Head DescriptionDokument1 SeiteTable 114: Descriptions of 3TX RF Modules Flexi Multiradio BTS RF Module and Remote Radio Head DescriptionMiau HuLaaNoch keine Bewertungen
- 6 Hilux (Cont. Next Page) : Power Source Cruise Control (1KD-FTV W/o DPF)Dokument6 Seiten6 Hilux (Cont. Next Page) : Power Source Cruise Control (1KD-FTV W/o DPF)Alfian AkbarNoch keine Bewertungen
- POWERTRONIX 3 Phase Auto TransformersDokument1 SeitePOWERTRONIX 3 Phase Auto TransformersJhon J TristanchoNoch keine Bewertungen
- CPI 400W KU Band AmpDokument2 SeitenCPI 400W KU Band Amp8dfwgfj4kyNoch keine Bewertungen
- Syllabus Signal and System IIDokument2 SeitenSyllabus Signal and System IIkuntjoroNoch keine Bewertungen
- Presentacion FV-WindDokument31 SeitenPresentacion FV-WindMario Edwin VidalNoch keine Bewertungen
- LatchDokument37 SeitenLatchNirmith VishwanathNoch keine Bewertungen