Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
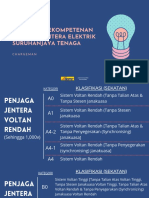
- Kategori Kompeten Penjaga Jentera Elektrik STDokument9 SeitenKategori Kompeten Penjaga Jentera Elektrik STAbun ParadoxsNoch keine Bewertungen
- XLRI Manish Gautam ResumeDokument2 SeitenXLRI Manish Gautam ResumeRatna TiwaryNoch keine Bewertungen
- On ShutdownDokument26 SeitenOn ShutdownRatna Tiwary100% (1)
- SIP GuidelinesDokument9 SeitenSIP GuidelinesRatna TiwaryNoch keine Bewertungen
- Airtel Martketing IIDokument13 SeitenAirtel Martketing IIRatna TiwaryNoch keine Bewertungen
- Airtel Martketing IIDokument13 SeitenAirtel Martketing IIRatna TiwaryNoch keine Bewertungen
- Ratna Kumari: Contact E Mail AddressDokument2 SeitenRatna Kumari: Contact E Mail AddressRatna TiwaryNoch keine Bewertungen
- Poly FuseDokument2 SeitenPoly FuseChinna Reddy0% (1)
- Lab 4Dokument14 SeitenLab 4rhinsaokiNoch keine Bewertungen
- Xdo XliffloaderDokument7 SeitenXdo XliffloaderRenuka ChavanNoch keine Bewertungen
- Banana ChipsDokument5 SeitenBanana Chipsbikram limbuNoch keine Bewertungen
- Ipod Shuffle: User GuideDokument32 SeitenIpod Shuffle: User GuidekennethNoch keine Bewertungen
- Application of Neutralization TitrationsDokument21 SeitenApplication of Neutralization TitrationsAsuncion Thea50% (2)
- Marking and Ordering Code System (Capacitors)Dokument6 SeitenMarking and Ordering Code System (Capacitors)José TurinNoch keine Bewertungen
- Fund PoroDokument97 SeitenFund PoroAgustín Ramos LópezNoch keine Bewertungen
- Wind Load Analysis For Open StructureDokument3 SeitenWind Load Analysis For Open Structurehitesh gandhiNoch keine Bewertungen
- Axis College of Engineering & Technology, AmbanolyDokument3 SeitenAxis College of Engineering & Technology, AmbanolygatewayglobalNoch keine Bewertungen
- Instructions For Repairing AlternatorDokument3 SeitenInstructions For Repairing AlternatordamoccaNoch keine Bewertungen
- Motor TestingDokument26 SeitenMotor TestingGas Gas DucatiNoch keine Bewertungen
- Faculty Recruitment TestDokument8 SeitenFaculty Recruitment TestSai Radha KrishnaNoch keine Bewertungen
- Honpe CatalogueDokument23 SeitenHonpe CatalogueGrupo XDSNoch keine Bewertungen
- Lane Departure Warning SystemDokument7 SeitenLane Departure Warning SystemRavisingh RajputNoch keine Bewertungen
- C SB453H8A Sanyo 5.5TR CompressorDokument14 SeitenC SB453H8A Sanyo 5.5TR CompressorHarsh Vani AroraNoch keine Bewertungen
- TGE 5, TGE 5-Ex, TGM 5, TGM 5-Ex, TGU 5, TGU 5-Ex: Transmitter For Angular PositionDokument10 SeitenTGE 5, TGE 5-Ex, TGM 5, TGM 5-Ex, TGU 5, TGU 5-Ex: Transmitter For Angular Positionvinodk335Noch keine Bewertungen
- 2022 FuturaSun 150m 500W SILK Premium en UnlockedDokument2 Seiten2022 FuturaSun 150m 500W SILK Premium en UnlockedEVERY GHSNoch keine Bewertungen
- Poster Flender Com1 PDFDokument1 SeitePoster Flender Com1 PDFvijaykumarnNoch keine Bewertungen
- Zahvalnica Bla BlaDokument2 SeitenZahvalnica Bla BlaBiljanaJanjušević100% (1)
- Features: Self Reset Auxiliary Flag Relay - Two ElementDokument3 SeitenFeatures: Self Reset Auxiliary Flag Relay - Two ElementbledmikifrNoch keine Bewertungen
- Chemistry Lab 2 Flame TestsDokument7 SeitenChemistry Lab 2 Flame Testshpcoutinho36Noch keine Bewertungen
- Lanko 753 - TdsDokument1 SeiteLanko 753 - TdskalslingamNoch keine Bewertungen
- COMSATS University Islamabad, Abbottabad Campus Department of Electrical and Computer Engineering Assignment#1Dokument1 SeiteCOMSATS University Islamabad, Abbottabad Campus Department of Electrical and Computer Engineering Assignment#1Aurang ZaibNoch keine Bewertungen
- Varec 5000 5010 PDFDokument10 SeitenVarec 5000 5010 PDFEduardo Rafael Lopez LezamaNoch keine Bewertungen
- Research Report (JAHANGIR'S TOMB)Dokument24 SeitenResearch Report (JAHANGIR'S TOMB)ahmerNoch keine Bewertungen
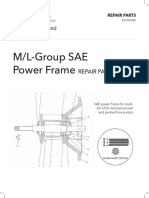
- RSAFRAMEDokument2 SeitenRSAFRAMETIOCA01Noch keine Bewertungen
- Bridge Inspection ManualDokument539 SeitenBridge Inspection ManualماقوريNoch keine Bewertungen
- Systemd CheatsheetDokument1 SeiteSystemd Cheatsheetzaffa11Noch keine Bewertungen