Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- 09-Digital Control SystemsDokument2 Seiten09-Digital Control SystemsPradyumna PooskuruNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- V and Inverted V Curves of Synchronous MotorDokument5 SeitenV and Inverted V Curves of Synchronous MotorPradyumna Pooskuru100% (1)
- Assign1 Mathematical ModellingDokument2 SeitenAssign1 Mathematical ModellingPradyumna PooskuruNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
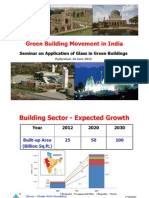
- IGBC - Green Building Movement in IndiaDokument28 SeitenIGBC - Green Building Movement in IndiaPradyumna PooskuruNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Article 50 Ijaet Volii Issue IV Oct Dec 2011Dokument6 SeitenArticle 50 Ijaet Volii Issue IV Oct Dec 2011Pradyumna PooskuruNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Bootloader3 PDFDokument18 SeitenBootloader3 PDFsaravananNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Spectrum Analyser For The Radio AmateurDokument24 SeitenA Spectrum Analyser For The Radio AmateurRavindra MogheNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Cópia de Teste Excel - Intermediário (5166) .XLS: BIM Technology For EngineersDokument6 SeitenCópia de Teste Excel - Intermediário (5166) .XLS: BIM Technology For EngineersFernanda AzevedoNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Creating Attachments To Work Items or To User Decisions in WorkflowsDokument20 SeitenCreating Attachments To Work Items or To User Decisions in Workflowselampe100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Ug CR RPTSTDDokument1.014 SeitenUg CR RPTSTDViji BanuNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Question IARDokument4 SeitenQuestion IARAryan jay vermaNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Finches Statistics Student-1Dokument7 SeitenFinches Statistics Student-1api-319172404Noch keine Bewertungen
- ProjectDokument6 SeitenProjecthazimsyakir69Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- (Complete) Electrolysis of Copper SulphateDokument4 Seiten(Complete) Electrolysis of Copper SulphateNoooooNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- 003pcu3001 Baja California - JMH - v4 PDFDokument15 Seiten003pcu3001 Baja California - JMH - v4 PDFEmir RubliovNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- OK Flux 231 (F7AZ-EL12) PDFDokument2 SeitenOK Flux 231 (F7AZ-EL12) PDFborovniskiNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Thermocouple: Seeback EffectDokument8 SeitenThermocouple: Seeback EffectMuhammadHadiNoch keine Bewertungen
- Solution To QuestionsDokument76 SeitenSolution To QuestionsVipul AggarwalNoch keine Bewertungen
- Motionless Electromagnetic GeneratorDokument8 SeitenMotionless Electromagnetic Generatorraja100% (1)
- Mbs PartitionwallDokument91 SeitenMbs PartitionwallRamsey RasmeyNoch keine Bewertungen
- 7625-300 Vitamin B12 AccuBind ELISA Rev 6Dokument2 Seiten7625-300 Vitamin B12 AccuBind ELISA Rev 6carlosalfredorivasNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Zener Barrier: 2002 IS CatalogDokument1 SeiteZener Barrier: 2002 IS CatalogabcNoch keine Bewertungen
- Steam Turbine ProtectionDokument5 SeitenSteam Turbine ProtectionRajesh P100% (1)
- Ergonomic DesignDokument132 SeitenErgonomic DesignErin WalkerNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Flame Test ExplanationDokument2 SeitenFlame Test ExplanationMia-shae ClarkeNoch keine Bewertungen
- SpaceClaim - Developers Guide-5-6Dokument2 SeitenSpaceClaim - Developers Guide-5-6Alexgh1993Noch keine Bewertungen
- HydrocarbonsDokument5 SeitenHydrocarbonsClaire Danes Tabamo DagalaNoch keine Bewertungen
- 2018 AniketDokument60 Seiten2018 Aniketaniket chakiNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- 3 DB RDMDokument49 Seiten3 DB RDMfaisal shahzadNoch keine Bewertungen
- 145Kv Sf6 Circuit Breaker Type Ltb145D1/B List of Drawings: Description Document Reference NO. SRDokument13 Seiten145Kv Sf6 Circuit Breaker Type Ltb145D1/B List of Drawings: Description Document Reference NO. SRneeraj100% (1)
- N5X Tuning SpreadsheetDokument79 SeitenN5X Tuning SpreadsheetWhyAnN20Noch keine Bewertungen
- Exercise 1 - Revision StringDokument2 SeitenExercise 1 - Revision StringKu H6Noch keine Bewertungen
- Fiberglass Fire Endurance Testing - 1992Dokument58 SeitenFiberglass Fire Endurance Testing - 1992shafeeqm3086Noch keine Bewertungen
- Acuvim II Profibus Modules Users Manual v1.10Dokument36 SeitenAcuvim II Profibus Modules Users Manual v1.10kamran719Noch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)