Das könnte Ihnen auch gefallen
- Sequences and Infinite Series, A Collection of Solved ProblemsVon EverandSequences and Infinite Series, A Collection of Solved ProblemsNoch keine Bewertungen
- Data Mining - Rule Based ClassificationDokument3 SeitenData Mining - Rule Based ClassificationDr B AnjanadeviNoch keine Bewertungen
- SE-6104 Data Mining and Analytics: Lecture # 12 Rule Based ClassificationDokument62 SeitenSE-6104 Data Mining and Analytics: Lecture # 12 Rule Based ClassificationHuma Qayyum MohyudDinNoch keine Bewertungen
- Data Preprocessing: Modern Data Analytics (G0Z39A) Prof. Dr. Ir. Jan de SpiegeleerDokument82 SeitenData Preprocessing: Modern Data Analytics (G0Z39A) Prof. Dr. Ir. Jan de SpiegeleerAli Shana'aNoch keine Bewertungen
- Univt - IVDokument72 SeitenUnivt - IVmananrawat537Noch keine Bewertungen
- Data Mining - Rule Based Classification 2Dokument1 SeiteData Mining - Rule Based Classification 2Sajid BhattNoch keine Bewertungen
- DSS06-DS5 - CLS-Rule Induction, K-NN, Naive BayesianDokument40 SeitenDSS06-DS5 - CLS-Rule Induction, K-NN, Naive BayesianThịnh TháiNoch keine Bewertungen
- Efficient Mining of Top-K Sequential Rules: Philippe Fournier-VigerDokument21 SeitenEfficient Mining of Top-K Sequential Rules: Philippe Fournier-VigerSarbani DasguptsNoch keine Bewertungen
- T02 - Algorithm Analysis and DesignDokument87 SeitenT02 - Algorithm Analysis and DesignThejus PadmakumarNoch keine Bewertungen
- Lecture 7Dokument20 SeitenLecture 7Shahmir BukhariNoch keine Bewertungen
- T02 - Algorithm Analysis and DesignDokument86 SeitenT02 - Algorithm Analysis and DesignThejus PadmakumarNoch keine Bewertungen
- Classification OthersDokument25 SeitenClassification OthersKathy KgNoch keine Bewertungen
- 01C Programming Part 1Dokument22 Seiten01C Programming Part 1Isabelle SeetNoch keine Bewertungen
- Lecture 7: Concurrency Control and RecoveryDokument41 SeitenLecture 7: Concurrency Control and RecoveryReni HoxhajNoch keine Bewertungen
- Rule Based ClassificationDokument2 SeitenRule Based ClassificationDeepeshNoch keine Bewertungen
- Module 5.1 - Association Rule Mining, Apriori Algorithm, Data Mining, Support, Confidence, ExamplesDokument108 SeitenModule 5.1 - Association Rule Mining, Apriori Algorithm, Data Mining, Support, Confidence, ExamplesMR Conqueror100% (1)
- Electric Network Analysis LabDokument6 SeitenElectric Network Analysis LabAhmad UsmanNoch keine Bewertungen
- Data Structure and Algorithms Lab Manuel in C++Dokument120 SeitenData Structure and Algorithms Lab Manuel in C++ahsankamran613Noch keine Bewertungen
- Lecture 3Dokument29 SeitenLecture 3jy cNoch keine Bewertungen
- Heat Transfer PDFDokument32 SeitenHeat Transfer PDFMJANoch keine Bewertungen
- Database Management SystemsDokument49 SeitenDatabase Management SystemsRam Prasad Reddy SadiNoch keine Bewertungen
- A Practical Guide To Support Vector Classification: I I I N LDokument15 SeitenA Practical Guide To Support Vector Classification: I I I N LrabbityeahNoch keine Bewertungen
- What Is Database Theory?Dokument15 SeitenWhat Is Database Theory?Roland ToroNoch keine Bewertungen
- CH 02Dokument59 SeitenCH 02sergiolombricoNoch keine Bewertungen
- Seminar 6-1Dokument16 SeitenSeminar 6-1bnvjNoch keine Bewertungen
- Instance Based LearningDokument49 SeitenInstance Based LearningVanshika Mehrotra100% (1)
- QCC Tool: Control Charts: (Part 4)Dokument55 SeitenQCC Tool: Control Charts: (Part 4)Mahmadah KhuryatiningsihNoch keine Bewertungen
- IME672 - Lecture 48Dokument21 SeitenIME672 - Lecture 48Himanshu BeniwalNoch keine Bewertungen
- LS-DYNA Introductory Course April07Dokument171 SeitenLS-DYNA Introductory Course April07unmeshNoch keine Bewertungen
- LSCM 453 Manufacturing Planning and Control: Fall 2021 Class 10Dokument19 SeitenLSCM 453 Manufacturing Planning and Control: Fall 2021 Class 10cwolfe2Noch keine Bewertungen
- Lecture No.06 Data Structures and AlgorithmsDokument11 SeitenLecture No.06 Data Structures and AlgorithmsTalha GondalNoch keine Bewertungen
- DSA Chapter 2Dokument89 SeitenDSA Chapter 2beshahashenafe20Noch keine Bewertungen
- Data Mining CS4168 Lecture 5 Basics of Classification 1Dokument25 SeitenData Mining CS4168 Lecture 5 Basics of Classification 1alina sheikhNoch keine Bewertungen
- Lecture 04Dokument20 SeitenLecture 04Tev WallaceNoch keine Bewertungen
- CP PDFDokument78 SeitenCP PDFederazzaNoch keine Bewertungen
- Presentation On Design and Analysis of AlgorithmDokument28 SeitenPresentation On Design and Analysis of AlgorithmAryan GargNoch keine Bewertungen
- ACFrOgAF6A4eF2xqNpd7pAP ibgp0EhpV3oVEhHszorpeaiOs qfwrYDN-ZwBJep5H-l777YMea49MKwRADiWCdcayVaDYZ0rHuE9QnAT3vKaxSSOSIOCkTgxMxVaxXt8i HjuY-Zvzut9abKHRXDokument8 SeitenACFrOgAF6A4eF2xqNpd7pAP ibgp0EhpV3oVEhHszorpeaiOs qfwrYDN-ZwBJep5H-l777YMea49MKwRADiWCdcayVaDYZ0rHuE9QnAT3vKaxSSOSIOCkTgxMxVaxXt8i HjuY-Zvzut9abKHRXKshitiz BhardwajNoch keine Bewertungen
- QM Session 4Dokument44 SeitenQM Session 4harherron123Noch keine Bewertungen
- Rates Laws: A Summary: Only Forward Reactants Important Two Types of Rate LawsDokument6 SeitenRates Laws: A Summary: Only Forward Reactants Important Two Types of Rate LawslildigipokeNoch keine Bewertungen
- CS LAB 12-Report-190469Dokument10 SeitenCS LAB 12-Report-190469malik awaisNoch keine Bewertungen
- Noc19 ch05 Assignment3Dokument4 SeitenNoc19 ch05 Assignment3Bhushan SoniNoch keine Bewertungen
- Date:. - Experiment # 12 Roll No.: - : To Complete Your TasksDokument4 SeitenDate:. - Experiment # 12 Roll No.: - : To Complete Your TasksRasheed ShahNoch keine Bewertungen
- Exam2 Fa2014 SolutionDokument14 SeitenExam2 Fa2014 Solutionrafeak rafeakNoch keine Bewertungen
- Hardening Function For Large Scale Distributed Computations: Doug Szajda Barry Lawson Jason OwenDokument39 SeitenHardening Function For Large Scale Distributed Computations: Doug Szajda Barry Lawson Jason OwendszajdaNoch keine Bewertungen
- Computer Organization Assembler and Simulator CSE112 ProjectDokument16 SeitenComputer Organization Assembler and Simulator CSE112 ProjectFUSION々 AnkitNoch keine Bewertungen
- Block-1 Unit-1 Relational Database Design: T (Enrolment Number) Is 00, Then T (Marks) Are Valid."Dokument17 SeitenBlock-1 Unit-1 Relational Database Design: T (Enrolment Number) Is 00, Then T (Marks) Are Valid."priyaNoch keine Bewertungen
- A Practical Guide To Support Vector ClassificationDokument16 SeitenA Practical Guide To Support Vector ClassificationJônatas Oliveira SilvaNoch keine Bewertungen
- cs224r Practical Deep RLDokument77 Seitencs224r Practical Deep RLmichael AmponsahNoch keine Bewertungen
- First Page RemovedDokument4 SeitenFirst Page RemovedTea CoffeeNoch keine Bewertungen
- 3900286Dokument23 Seiten3900286Imran ShaikhNoch keine Bewertungen
- Cluster Ppt1Dokument27 SeitenCluster Ppt1api-3717234Noch keine Bewertungen
- Deep Learning Practical Assignment #1:: InstructionsDokument5 SeitenDeep Learning Practical Assignment #1:: InstructionsGaith BelkacemNoch keine Bewertungen
- Unit-3 Dbms Odd Sem 2020-2021Dokument53 SeitenUnit-3 Dbms Odd Sem 2020-2021Mohit KumarNoch keine Bewertungen
- MCS043Dokument21 SeitenMCS043charychandanNoch keine Bewertungen
- 15 Scale Down The ClusterDokument7 Seiten15 Scale Down The ClusterAnonymous gqSpNAmlWNoch keine Bewertungen
- Ict NotesDokument3 SeitenIct NotesSajid bhattiNoch keine Bewertungen
- CS4961 L15Dokument14 SeitenCS4961 L15Anirudh SethNoch keine Bewertungen
- School of Electrical Engineering and Computer Science: Linear Circuit Analysis EE109Dokument21 SeitenSchool of Electrical Engineering and Computer Science: Linear Circuit Analysis EE109Saleem IftekharNoch keine Bewertungen
- Relational Database Design: NormalizationDokument63 SeitenRelational Database Design: NormalizationSouvikNoch keine Bewertungen
- Similarity and DissimilarityDokument34 SeitenSimilarity and DissimilarityAllison CollierNoch keine Bewertungen
- New Microsoft Power Point PresentationDokument18 SeitenNew Microsoft Power Point PresentationAllison CollierNoch keine Bewertungen
- Properties of Objective MeasuresDokument6 SeitenProperties of Objective MeasuresAllison CollierNoch keine Bewertungen
- FP Growth AlgorithmDokument21 SeitenFP Growth AlgorithmAllison CollierNoch keine Bewertungen
- Association Rule MiningDokument34 SeitenAssociation Rule MiningAllison CollierNoch keine Bewertungen
- Rule Based ClassifierDokument20 SeitenRule Based ClassifierAllison CollierNoch keine Bewertungen
- Assessment 4 PDFDokument10 SeitenAssessment 4 PDFAboud Hawrechz MacalilayNoch keine Bewertungen
- Fluoride - Wide Range of Serious Health Problems"Dokument29 SeitenFluoride - Wide Range of Serious Health Problems"zataullah100% (2)
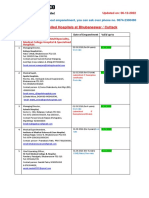
- Empanelled Hospitals List Updated - 06-12-2022 - 1670482933145Dokument19 SeitenEmpanelled Hospitals List Updated - 06-12-2022 - 1670482933145mechmaster4uNoch keine Bewertungen
- Process Industry Practices Insulation: PIP INEG2000 Guidelines For Use of Insulation PracticesDokument15 SeitenProcess Industry Practices Insulation: PIP INEG2000 Guidelines For Use of Insulation PracticesZubair RaoofNoch keine Bewertungen
- Assignment-For-Final of-Supply-Chain - Management of Courses PSC 545 & 565 PDFDokument18 SeitenAssignment-For-Final of-Supply-Chain - Management of Courses PSC 545 & 565 PDFRAKIB HOWLADERNoch keine Bewertungen
- Channel & Lomolino 2000 Ranges and ExtinctionDokument3 SeitenChannel & Lomolino 2000 Ranges and ExtinctionKellyta RodriguezNoch keine Bewertungen
- Controlled DemolitionDokument3 SeitenControlled DemolitionJim FrancoNoch keine Bewertungen
- Helipal Tbs Powercube ManualDokument29 SeitenHelipal Tbs Powercube Manualoualid zouggarNoch keine Bewertungen
- Introduction To AmplifierDokument8 SeitenIntroduction To AmplifierElaine BicolNoch keine Bewertungen
- Simon Fraser University: Consent and Release FormDokument1 SeiteSimon Fraser University: Consent and Release FormpublicsqNoch keine Bewertungen
- Managemant PrincipleDokument11 SeitenManagemant PrincipleEthan ChorNoch keine Bewertungen
- Taxation Law 1Dokument7 SeitenTaxation Law 1jalefaye abapoNoch keine Bewertungen
- Abc Uae Oil and GasDokument41 SeitenAbc Uae Oil and GasajayNoch keine Bewertungen
- Nyambe African Adventures An Introduction To African AdventuresDokument5 SeitenNyambe African Adventures An Introduction To African AdventuresKaren LeongNoch keine Bewertungen
- National Employment Policy, 2008Dokument58 SeitenNational Employment Policy, 2008Jeremia Mtobesya0% (1)
- Risk Analysis and Assessment Methodologies in Work SitesDokument49 SeitenRisk Analysis and Assessment Methodologies in Work SitesNhut NguyenNoch keine Bewertungen
- SAED90DR Rev1 2 21.01.2011Dokument24 SeitenSAED90DR Rev1 2 21.01.2011Cherry AbhiNoch keine Bewertungen
- Sickle Cell DiseaseDokument10 SeitenSickle Cell DiseaseBrooke2014Noch keine Bewertungen
- University Fees Structure (Himalayan Garhwal University) - UttarakhandDokument1 SeiteUniversity Fees Structure (Himalayan Garhwal University) - UttarakhandabhaybaranwalNoch keine Bewertungen
- Thesis On Retail Management of The Brand 'Sleepwell'Dokument62 SeitenThesis On Retail Management of The Brand 'Sleepwell'Sajid Lodha100% (1)
- Corporate Restructuring Short NotesDokument31 SeitenCorporate Restructuring Short NotesSatwik Jain57% (7)
- Atlascopco XAHS 175 DD ASL Parts ListDokument141 SeitenAtlascopco XAHS 175 DD ASL Parts ListMoataz SamiNoch keine Bewertungen
- Participatory EvaluationDokument4 SeitenParticipatory EvaluationEvaluación Participativa100% (1)
- Business Plan: Muzammil Deshmukh, MMS From Kohinoor College, MumbaiDokument6 SeitenBusiness Plan: Muzammil Deshmukh, MMS From Kohinoor College, MumbaiMuzammil DeshmukhNoch keine Bewertungen
- Catalogue of Archaeological Finds FromDokument67 SeitenCatalogue of Archaeological Finds FromAdrinaNoch keine Bewertungen
- Angelo (Patrick) Complaint PDFDokument2 SeitenAngelo (Patrick) Complaint PDFPatLohmannNoch keine Bewertungen
- Paper II - Guidelines On The Use of DuctlessDokument51 SeitenPaper II - Guidelines On The Use of DuctlessMohd Khairul Md DinNoch keine Bewertungen
- Chestionar 2Dokument5 SeitenChestionar 2Alex AndruNoch keine Bewertungen
- List of Olympic MascotsDokument10 SeitenList of Olympic MascotsmukmukkumNoch keine Bewertungen
- Carpentry Grade 8 Week 1 2Dokument20 SeitenCarpentry Grade 8 Week 1 2SANTIAGO ALVISNoch keine Bewertungen