Das könnte Ihnen auch gefallen
- Arm7 ArchitectureDokument20 SeitenArm7 ArchitectureCharitha CherryNoch keine Bewertungen
- 8,16,32 Floating Point Processing in ARMDokument25 Seiten8,16,32 Floating Point Processing in ARMOMKAR BHILARE100% (1)
- Chapter 3: Jump, Loop and Call InstructionsDokument8 SeitenChapter 3: Jump, Loop and Call InstructionsIsmailNoch keine Bewertungen
- ARM Architecture - L5Dokument7 SeitenARM Architecture - L5Maniswari MothukuruNoch keine Bewertungen
- 5- CH 5 Arithmetic and Logic Instructions - ١٢٢٠١٩Dokument44 Seiten5- CH 5 Arithmetic and Logic Instructions - ١٢٢٠١٩Boy azNoch keine Bewertungen
- Arm Amba AhbDokument18 SeitenArm Amba AhbgeethaNoch keine Bewertungen
- MP Viva Questions With AnswersDokument13 SeitenMP Viva Questions With AnswersDeepti ChandrasekharanNoch keine Bewertungen
- LCD and KEYBORD Interfacing Part 1Dokument25 SeitenLCD and KEYBORD Interfacing Part 1Prathamesh AmateNoch keine Bewertungen
- Instruction PipelineDokument27 SeitenInstruction PipelineEswin AngelNoch keine Bewertungen
- Advanced RISC Machine-ARM Notes BhurchandiDokument8 SeitenAdvanced RISC Machine-ARM Notes BhurchandiVipin TiwariNoch keine Bewertungen
- I O Interfacing Using 8086Dokument4 SeitenI O Interfacing Using 8086Aanandha SaravananNoch keine Bewertungen
- Pic18 Serial CommunicationDokument25 SeitenPic18 Serial Communicationadamwaiz100% (3)
- AP Unit 3Dokument133 SeitenAP Unit 3harshad lokhandeNoch keine Bewertungen
- ARM Processors' - ArchitectureDokument27 SeitenARM Processors' - ArchitectureyayavaramNoch keine Bewertungen
- Sap PDFDokument135 SeitenSap PDFKowshikaNoch keine Bewertungen
- Programming The MCU 8051 PDFDokument48 SeitenProgramming The MCU 8051 PDFDK White LionNoch keine Bewertungen
- ARM 4 Part2Dokument9 SeitenARM 4 Part2SUGYAN ANAND MAHARANANoch keine Bewertungen
- Implementing Communication Bridge Between I2C and APBDokument4 SeitenImplementing Communication Bridge Between I2C and APBDon RajuNoch keine Bewertungen
- Ch17 Spi Protocol and Max7221 Display InterfacingDokument51 SeitenCh17 Spi Protocol and Max7221 Display InterfacingSimple knowledgeNoch keine Bewertungen
- 8085 Instruction SetDokument79 Seiten8085 Instruction SetsivaperumalNoch keine Bewertungen
- 8237 DMA ControllerDokument11 Seiten8237 DMA ControllerRojot SahaNoch keine Bewertungen
- Microprosser 8085Dokument15 SeitenMicroprosser 8085saigdv1978Noch keine Bewertungen
- Arm Program ModelDokument4 SeitenArm Program ModelvlkumashankardeekshithNoch keine Bewertungen
- PWMDokument57 SeitenPWMAhmed Mortuza Saleque SaikotNoch keine Bewertungen
- 8086 Interview Questions:: 8086 MicroprocessorDokument20 Seiten8086 Interview Questions:: 8086 MicroprocessorHamid FarhanNoch keine Bewertungen
- Microcontroller and Embedded SystemsDokument2 SeitenMicrocontroller and Embedded SystemsIndranilNoch keine Bewertungen
- LPC1768 GPIO Programming TutorialDokument5 SeitenLPC1768 GPIO Programming Tutorialsiva kumaarNoch keine Bewertungen
- Processor Architecture and Interfacing: Part 13: The 8255 PPIDokument24 SeitenProcessor Architecture and Interfacing: Part 13: The 8255 PPIPalash ParmarNoch keine Bewertungen
- Adc0808 and 8253Dokument35 SeitenAdc0808 and 8253Avanish NiranjanNoch keine Bewertungen
- I2C Interfacing To XC3S400 FPGADokument14 SeitenI2C Interfacing To XC3S400 FPGAMahesh BhatkalNoch keine Bewertungen
- 02 ARM Processor FundamentalsDokument65 Seiten02 ARM Processor Fundamentalsbengaltiger100% (2)
- Digital Electronics QuestionsDokument8 SeitenDigital Electronics QuestionsShivamahendar SunkaNoch keine Bewertungen
- Chapter-5: Assembly Language Programming Using 8086 (16 Marks)Dokument55 SeitenChapter-5: Assembly Language Programming Using 8086 (16 Marks)PRABHAKAR MORENoch keine Bewertungen
- Chapter 2 - Microcontroller Architecture & Assembly LanguageDokument41 SeitenChapter 2 - Microcontroller Architecture & Assembly LanguageJiachyi Yeoh100% (1)
- 18CS44 Model Question Paper-1 With Effect From 2019-20 (CBCS Scheme)Dokument2 Seiten18CS44 Model Question Paper-1 With Effect From 2019-20 (CBCS Scheme)M.A rajaNoch keine Bewertungen
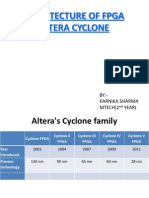
- Architecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)Dokument29 SeitenArchitecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)karnika143100% (1)
- Als Sda Arm7 06 UmDokument31 SeitenAls Sda Arm7 06 UmPuneeth PuniNoch keine Bewertungen
- 4 Bit Cpu ReportDokument16 Seiten4 Bit Cpu ReportHarshil LodhiNoch keine Bewertungen
- UNIT I Embedded SystemsDokument60 SeitenUNIT I Embedded SystemspremsonyNoch keine Bewertungen
- Timer LPC2148Dokument5 SeitenTimer LPC2148yuvarajnarayanasamyNoch keine Bewertungen
- Exp-No5 Subtract 8 Bit and 16-Bit NumbersDokument3 SeitenExp-No5 Subtract 8 Bit and 16-Bit NumbersMohammed Dyhia AliNoch keine Bewertungen
- 8085 Class Test in Truc TinDokument1 Seite8085 Class Test in Truc Tinv1rangNoch keine Bewertungen
- Coa Unit 1Dokument28 SeitenCoa Unit 1vivek kumarNoch keine Bewertungen
- Unit5-8051 4th Sem Anna University CseDokument21 SeitenUnit5-8051 4th Sem Anna University CseVijayashree VenkatNoch keine Bewertungen
- Two Mark MicroprocessorDokument18 SeitenTwo Mark MicroprocessorGopinathan MNoch keine Bewertungen
- ARM Interrupt ProcessingDokument33 SeitenARM Interrupt Processinglovet essampongNoch keine Bewertungen
- Thumb-2 Instruction SetDokument11 SeitenThumb-2 Instruction SetSai Keerthana DNoch keine Bewertungen
- Arm7 LPC2148 1Dokument48 SeitenArm7 LPC2148 1Roberta Fisher100% (2)
- Pipeline Hazards. PresentationDokument20 SeitenPipeline Hazards. PresentationReaderRRGHT100% (1)
- Data Processing InstructionDokument35 SeitenData Processing InstructionDado Fabrička GreškaNoch keine Bewertungen
- 2 Pic18f452Dokument29 Seiten2 Pic18f452Mohan NatrajanNoch keine Bewertungen
- 8086 MicroprocessorDokument37 Seiten8086 MicroprocessorMahesh krishNoch keine Bewertungen
- Interfacing Analog To Digital Data ConvertersDokument16 SeitenInterfacing Analog To Digital Data ConvertersPrabin123Noch keine Bewertungen
- UartDokument25 SeitenUartWajeed Mohamad100% (2)
- Asic & Fpga Design QB For MeDokument24 SeitenAsic & Fpga Design QB For MejebajohannahsamuelNoch keine Bewertungen
- ARM PipeliningDokument31 SeitenARM PipeliningtherksNoch keine Bewertungen
- Risc in Pipe IneDokument39 SeitenRisc in Pipe IneNagarjuna ReddyNoch keine Bewertungen
- 08 CompOrgDokument35 Seiten08 CompOrgIke Mag-away GaamilNoch keine Bewertungen
- ARM Introduction & Instruction Set ArchitectureDokument71 SeitenARM Introduction & Instruction Set ArchitecturebalaNoch keine Bewertungen
- l18 ArmDokument71 Seitenl18 ArmVamsi SomisettyNoch keine Bewertungen
- Astrocartography ChartDokument1 SeiteAstrocartography ChartarthicseNoch keine Bewertungen
- Mad's Free KP Kundali (20160503053353)Dokument2 SeitenMad's Free KP Kundali (20160503053353)arthicseNoch keine Bewertungen
- Avkahada Chakra Ghatak (Malefics)Dokument2 SeitenAvkahada Chakra Ghatak (Malefics)arthicseNoch keine Bewertungen
- Seventh BhaavaDokument1 SeiteSeventh BhaavaarthicseNoch keine Bewertungen
- Getting Started Guide: ©2014 Techsmith Corporation. All Rights ReservedDokument9 SeitenGetting Started Guide: ©2014 Techsmith Corporation. All Rights ReservedarthicseNoch keine Bewertungen
- HP LaserJet MFP M72625-M72630 Series Service Training - V0.94 - 20180206Dokument130 SeitenHP LaserJet MFP M72625-M72630 Series Service Training - V0.94 - 20180206smrizalNoch keine Bewertungen
- Problem Set 1 Man - EconDokument2 SeitenProblem Set 1 Man - EconDW Waters100% (1)
- List of Presidents of The People's Republic of China - WikipediaDokument10 SeitenList of Presidents of The People's Republic of China - WikipediaAli Nawaz tanwariNoch keine Bewertungen
- Classification of Steam Engines: by ConstructionDokument22 SeitenClassification of Steam Engines: by ConstructionI AM NOT CHINESENoch keine Bewertungen
- Important Case Law & Legal GK 2020Dokument25 SeitenImportant Case Law & Legal GK 2020kusu100% (1)
- Copley TPK 2007Dokument15 SeitenCopley TPK 2007MatthewNoch keine Bewertungen
- Project Cost Management With 5D Bim: SciencedirectDokument8 SeitenProject Cost Management With 5D Bim: Sciencedirectcrises7Noch keine Bewertungen
- Manual For DealersDokument23 SeitenManual For DealersSheilaMaeBernaldezNoch keine Bewertungen
- SEA PrizrenDokument49 SeitenSEA Prizrentom_hamm1008Noch keine Bewertungen
- Danfoss: New Light Commercial Scroll CompressorsDokument1 SeiteDanfoss: New Light Commercial Scroll Compressors12345laurNoch keine Bewertungen
- KSP Towage SDN BHD: This Vessel Specification Is Given in Good Faith and Assumed To Be Correct As at 03 July 2019Dokument2 SeitenKSP Towage SDN BHD: This Vessel Specification Is Given in Good Faith and Assumed To Be Correct As at 03 July 2019Alex GonzalezNoch keine Bewertungen
- Maintenance Terminal Manual ORONA ARCA 2Dokument182 SeitenMaintenance Terminal Manual ORONA ARCA 2habibulla71% (7)
- STP For Rural MarketsDokument16 SeitenSTP For Rural MarketsGowri Sankar100% (5)
- Nutolts 201205 DLDokument84 SeitenNutolts 201205 DLYvoSteentjes100% (1)
- 10 Xtralis Osid Brochure A4 LoresDokument4 Seiten10 Xtralis Osid Brochure A4 LoresSathyamoorthy KamakottiNoch keine Bewertungen
- Karlos KarlinaDokument2 SeitenKarlos KarlinaTip RendahNoch keine Bewertungen
- Becky's Feasibility Study Project QuestionnaireDokument3 SeitenBecky's Feasibility Study Project Questionnaireschu14662045Noch keine Bewertungen
- Statics All in OneDokument120 SeitenStatics All in OneSaad Salman100% (1)
- Safety Health Manager in North America Resume Gerald DeschaineDokument3 SeitenSafety Health Manager in North America Resume Gerald DeschaineGeraldDeschaineNoch keine Bewertungen
- A Study On Passenger S Satisfaction Towards Railway Services in Erode JunctionDokument6 SeitenA Study On Passenger S Satisfaction Towards Railway Services in Erode JunctionEBIN JOHNNoch keine Bewertungen
- Bosch CM Coach enDokument21 SeitenBosch CM Coach enHélder AraujoNoch keine Bewertungen
- HP Board of School Education Dharamshala Syllabus: Subject: Computer Science Class: 9Dokument4 SeitenHP Board of School Education Dharamshala Syllabus: Subject: Computer Science Class: 9Principal AveriNoch keine Bewertungen
- Software Review Testing - SRT Question and Answers - TrenovisionDokument46 SeitenSoftware Review Testing - SRT Question and Answers - TrenovisionShadow Gaming50% (4)
- Knowledge Work & Human CapitalDokument2 SeitenKnowledge Work & Human Capitalchandnioptom100% (2)
- Upa 150CDokument40 SeitenUpa 150CRené Sebastián Sabando Varas0% (1)
- The Twigan Cultural Centre Dispute: T I L M C C 2017Dokument59 SeitenThe Twigan Cultural Centre Dispute: T I L M C C 2017Adimarta TeguhNoch keine Bewertungen
- Chapter 4 - Partnership LiquidationDokument4 SeitenChapter 4 - Partnership LiquidationMikaella BengcoNoch keine Bewertungen
- Storage, Stacking and Handling Practices PDFDokument15 SeitenStorage, Stacking and Handling Practices PDFNgurah BuanaNoch keine Bewertungen
- 6th Exam Time TableDokument21 Seiten6th Exam Time TableSunil ChoudhariNoch keine Bewertungen