Das könnte Ihnen auch gefallen
- CAN Protocol Principles of Data ExchangeDokument4 SeitenCAN Protocol Principles of Data Exchangerenju88100% (1)
- 7 Automotive CANDokument82 Seiten7 Automotive CANRamanan MNoch keine Bewertungen
- CAN FinalDokument30 SeitenCAN Finaljyothi bagewadiNoch keine Bewertungen
- CCNA Interview Questions You'll Most Likely Be AskedVon EverandCCNA Interview Questions You'll Most Likely Be AskedNoch keine Bewertungen
- Finite State Machines: by Mike ChenDokument25 SeitenFinite State Machines: by Mike ChenKulwant NagiNoch keine Bewertungen
- MicrocontrollersDokument14 SeitenMicrocontrollersanshu4u06100% (1)
- Details of ARP and PPPDokument40 SeitenDetails of ARP and PPPYogesh Palkar100% (1)
- Basics of The Communication ProtocolDokument19 SeitenBasics of The Communication ProtocolNEETHU PRAKASH100% (1)
- HC SR04 PDFDokument3 SeitenHC SR04 PDFVipan Sharma100% (1)
- STM32 - Prior To StartDokument7 SeitenSTM32 - Prior To StartShawon Mohammad Shahryiar100% (1)
- IndusDokument7 SeitenIndusTristan Cabatac100% (1)
- What Is The Difference Between Microcontrollers and 8051Dokument6 SeitenWhat Is The Difference Between Microcontrollers and 8051Erandi Brito100% (1)
- Names of student: -Nguyễn Tiến Đức -Trần Hoàng Đăng Khoa Class: 16DTCLC1 Subject: Computer NetworkingDokument17 SeitenNames of student: -Nguyễn Tiến Đức -Trần Hoàng Đăng Khoa Class: 16DTCLC1 Subject: Computer NetworkingAnonymous EAPWaVHfYp100% (1)
- 5 2 X 16 Parallel LCD: 3.5.1 Technical SpecificationsDokument3 Seiten5 2 X 16 Parallel LCD: 3.5.1 Technical SpecificationsManish Singh100% (1)
- PcbdesigningDokument16 SeitenPcbdesigningPraveen Kumar Chitluri100% (1)
- DMA Versus Polling or Interrupt Driven I/ODokument13 SeitenDMA Versus Polling or Interrupt Driven I/OCyrus Patrick Dacoco100% (1)
- Uart (Universal Asynchronous Receiver Transmitter) ProtocolDokument3 SeitenUart (Universal Asynchronous Receiver Transmitter) Protocolshilpa8a8s100% (1)
- Lecture 7 - LCDDokument25 SeitenLecture 7 - LCDSuhaib Abugdera100% (1)
- RS 232Dokument1 SeiteRS 232Aneela Pathan100% (1)
- XL MaxSonar WR - Datasheet PDFDokument26 SeitenXL MaxSonar WR - Datasheet PDFfernandoviolante8551100% (1)
- X 25Dokument4 SeitenX 25Neeti Saurav Pahuja100% (1)
- PIC+l293d DocumentDokument5 SeitenPIC+l293d Documentmadduanil100% (1)
- Uart Spi I2cDokument17 SeitenUart Spi I2cestraj1954100% (1)
- LCD 2 X 8Dokument4 SeitenLCD 2 X 8dek_war100% (1)
- The 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsDokument51 SeitenThe 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsAmAnDeepSingh100% (1)
- HC Sr04Dokument4 SeitenHC Sr04Shofol Biswas100% (1)
- Port PDFDokument16 SeitenPort PDFdharanika100% (1)
- Ieee 802.11Dokument13 SeitenIeee 802.11jeffy100% (1)
- PS2® To Usb Mouse Translator Hardware DiagramDokument10 SeitenPS2® To Usb Mouse Translator Hardware Diagramjhenriqueh100% (1)
- DYP Serial Ultrasonic Sensor: FeaturesDokument2 SeitenDYP Serial Ultrasonic Sensor: Featuresvenikiran100% (1)
- Using Internal EEPROM of PIC Microcontroller - MikroCDokument16 SeitenUsing Internal EEPROM of PIC Microcontroller - MikroCdevchandar100% (1)
- Networking Tutorial - TCPIP Over EthernetDokument8 SeitenNetworking Tutorial - TCPIP Over EthernetAbhilash V Pillai100% (24)
- Embeddded Pic 18f Starter KitDokument3 SeitenEmbeddded Pic 18f Starter KitEmblitz Rajajinagar100% (1)
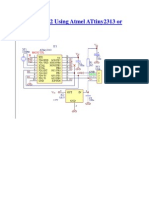
- USB To RS232 Using Atmel ATtiny2313 or ATmega8Dokument4 SeitenUSB To RS232 Using Atmel ATtiny2313 or ATmega8Nugraha Indrawan100% (2)
- Introduction To x64 AssemblyDokument4 SeitenIntroduction To x64 AssemblySoreanu Dumitru-Paul100% (1)
- Tshoot EthernetDokument11 SeitenTshoot Ethernetmrigank shekhar100% (1)
- Serial WinDokument4 SeitenSerial WinFrancisco Ochoa Bueno100% (1)
- H-Bridge: 4.1 DefinitionDokument11 SeitenH-Bridge: 4.1 DefinitionJunaid Iftikhar100% (1)
- Induction Motor Drive Using Thyristor Based Cycloconverter For Variable Torque Load ApplicationDokument5 SeitenInduction Motor Drive Using Thyristor Based Cycloconverter For Variable Torque Load ApplicationIJIRST100% (2)
- Assembly TutorialDokument66 SeitenAssembly TutorialDarmawan Adiputra100% (2)
- Contador Frecuencia 1-50Dokument4 SeitenContador Frecuencia 1-50jose100% (2)
- Sound Sensor Module PDFDokument5 SeitenSound Sensor Module PDFTrần Thảo Nguyên100% (1)
- Agribot Project PresentationDokument21 SeitenAgribot Project Presentationumaiya1990100% (1)
- USB-to-RS232 Using Atmel ATtiny2313 or ATmega8Dokument4 SeitenUSB-to-RS232 Using Atmel ATtiny2313 or ATmega8mikcomi100% (1)
- Default Switch/Jumper SettingsDokument16 SeitenDefault Switch/Jumper SettingsRafael Avella100% (1)
- I2c CommunicationDokument9 SeitenI2c CommunicationSanjay Sharma100% (2)
- DMA Controller (DMAC) : - Data transfer between the μP's main memory & an externalDokument6 SeitenDMA Controller (DMAC) : - Data transfer between the μP's main memory & an externalharinik7100% (1)
- Lab LCDDokument6 SeitenLab LCDJesus Cotrina100% (1)
- Ultrasonic Distance Sensor PWM Output User ManualDokument9 SeitenUltrasonic Distance Sensor PWM Output User Manualsahithi kolla100% (2)
- Masters 2012 - Introduction To Microchip USB SolutionsDokument79 SeitenMasters 2012 - Introduction To Microchip USB SolutionsTech[BR]100% (2)
- Introduction I2c and SPIDokument14 SeitenIntroduction I2c and SPIHaris Jeelani100% (1)
- Bidirectional Current Source-TIDokument9 SeitenBidirectional Current Source-TIestraj1954100% (1)
- In-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFDokument14 SeitenIn-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFMauro Vargas100% (2)
- Chapter 4 PIC IO ProgrammingDokument28 SeitenChapter 4 PIC IO ProgrammingAndy Wo100% (1)
- CommchkDokument4 SeitenCommchkjamesyu100% (1)
- 9-Serial Comm (Autosaved)Dokument48 Seiten9-Serial Comm (Autosaved)M ADNAN Z100% (1)
- Controller Area NetworkDokument14 SeitenController Area Networktarakram2809Noch keine Bewertungen
- Control Area Network IntroDokument8 SeitenControl Area Network IntroPOWERBASE100% (1)
- Controller Area Network: ECGR 6185 Advanced Embedded SystemsDokument31 SeitenController Area Network: ECGR 6185 Advanced Embedded SystemsN.G YadavNoch keine Bewertungen
- CN Mod2Dokument61 SeitenCN Mod2Vignesh H VNoch keine Bewertungen
- CH8-E3-E4 EWS-Landline & Mobile VASDokument37 SeitenCH8-E3-E4 EWS-Landline & Mobile VASMalu MohanNoch keine Bewertungen
- FWF MMTC e LetterDokument3 SeitenFWF MMTC e LetterMalu MohanNoch keine Bewertungen
- Ch1 E3 E4 Ews NGSDH ConceptsDokument25 SeitenCh1 E3 E4 Ews NGSDH ConceptsMalu MohanNoch keine Bewertungen
- Bi Directional InverterDokument7 SeitenBi Directional InverterMalu MohanNoch keine Bewertungen
- EC2042 Embedded and Real Time Systems Lecture NotesDokument79 SeitenEC2042 Embedded and Real Time Systems Lecture NotesPraveen ChellapandianNoch keine Bewertungen
- Synchronous Digital Hierarchy (SDH)Dokument53 SeitenSynchronous Digital Hierarchy (SDH)kunj bihari rajpootNoch keine Bewertungen
- Optimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingDokument21 SeitenOptimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingMalu MohanNoch keine Bewertungen
- Spread Spectrum: Wireless Networks Spring 2005Dokument30 SeitenSpread Spectrum: Wireless Networks Spring 2005Malu MohanNoch keine Bewertungen
- Classification of Power Quality Disturbances Using Wavelets and Support Vector MachineDokument6 SeitenClassification of Power Quality Disturbances Using Wavelets and Support Vector MachineMalu MohanNoch keine Bewertungen
- Tutorialv0 3Dokument92 SeitenTutorialv0 3Malu MohanNoch keine Bewertungen
- Lecture5 Frequency Bodenyquist2Dokument69 SeitenLecture5 Frequency Bodenyquist2Malu MohanNoch keine Bewertungen
- RtosDokument37 SeitenRtosMalu MohanNoch keine Bewertungen
- 15 VM ConceptsDokument36 Seiten15 VM ConceptsMalu MohanNoch keine Bewertungen
- EthernetDokument14 SeitenEthernetFery Qrenz AnthonyNoch keine Bewertungen