Das könnte Ihnen auch gefallen
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11Von EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Noch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Dynamical Systems and Chaos ExplainedDokument31 SeitenDynamical Systems and Chaos ExplainedKasra ManiNoch keine Bewertungen
- Behaviour of Nonlinear SystemsDokument11 SeitenBehaviour of Nonlinear SystemsCheenu SinghNoch keine Bewertungen
- Applications of Dynamical SystemsDokument32 SeitenApplications of Dynamical SystemsAl VlearNoch keine Bewertungen
- Handout 1Dokument16 SeitenHandout 1Chadwick BarclayNoch keine Bewertungen
- Lecture 6: Stability of Dynamic Systems Lyapunov's Direct Method 6.1 Notions of StabilityDokument10 SeitenLecture 6: Stability of Dynamic Systems Lyapunov's Direct Method 6.1 Notions of Stabilitytennis1949Noch keine Bewertungen
- Dynamics of A Mass-Spring-Pendulum System With Vastly Different FrequenciesDokument6 SeitenDynamics of A Mass-Spring-Pendulum System With Vastly Different FrequenciesvertugoNoch keine Bewertungen
- Chaos in Non-Linear Dynamics: - Shweta Tripathi - Rajan SinghDokument24 SeitenChaos in Non-Linear Dynamics: - Shweta Tripathi - Rajan SinghRajan SinghNoch keine Bewertungen
- Slides Control System 2Dokument13 SeitenSlides Control System 2Eric GardnerNoch keine Bewertungen
- Lec8 SMDokument15 SeitenLec8 SMSwagat PradhanNoch keine Bewertungen
- Module1 Masoller Part1Dokument87 SeitenModule1 Masoller Part1Daniel GuevaraNoch keine Bewertungen
- Nonlinear Dynamics and Chaos III: Introducing the Concept of ChaosDokument16 SeitenNonlinear Dynamics and Chaos III: Introducing the Concept of Chaossl1uckyNoch keine Bewertungen
- Problem2 PDFDokument3 SeitenProblem2 PDFEdgar HuancaNoch keine Bewertungen
- بعض المشكلات الأساسية في الميكانيكا الإحصائيةDokument30 Seitenبعض المشكلات الأساسية في الميكانيكا الإحصائيةhamid hosamNoch keine Bewertungen
- Anomalous Relaxation Oscillations Due To Dynamical Traps: I.A. Lubashevsky, V.V. Gaychuk, A.V. DemchukDokument9 SeitenAnomalous Relaxation Oscillations Due To Dynamical Traps: I.A. Lubashevsky, V.V. Gaychuk, A.V. DemchukvagafNoch keine Bewertungen
- Lyapunov StabilityDokument26 SeitenLyapunov StabilitySri MathiNoch keine Bewertungen
- Quantum decoherence and dissipation master equationsDokument21 SeitenQuantum decoherence and dissipation master equationsgaminster6935Noch keine Bewertungen
- Lectures On Ergodic Theory by PetersenDokument28 SeitenLectures On Ergodic Theory by PetersenKelvin LagotaNoch keine Bewertungen
- Vibration in Two Lectures: Free, Forced, Damped and Undamped SystemsDokument12 SeitenVibration in Two Lectures: Free, Forced, Damped and Undamped SystemsUjjawal GuptaNoch keine Bewertungen
- Pole-Placement in Higher-Order Sliding-Mode ControlDokument6 SeitenPole-Placement in Higher-Order Sliding-Mode ControldhineshpNoch keine Bewertungen
- 008.5 Intro To Dynamical SystemsDokument23 Seiten008.5 Intro To Dynamical SystemsAlaa MohyeldinNoch keine Bewertungen
- Markov Chain and Its Applications (Linear Algebra Applications)Dokument10 SeitenMarkov Chain and Its Applications (Linear Algebra Applications)Xinye YangNoch keine Bewertungen
- Axioms of Quantum MechanicsDokument7 SeitenAxioms of Quantum MechanicsAZIZ ALBAR ROFI'UDDAROJADNoch keine Bewertungen
- L23 - Postulates of QMDokument24 SeitenL23 - Postulates of QMdomagix470Noch keine Bewertungen
- Chaos PresentationDokument26 SeitenChaos PresentationSiana Alinda AniseNoch keine Bewertungen
- Slides Masoller Part1 2016Dokument109 SeitenSlides Masoller Part1 2016netcenterdataNoch keine Bewertungen
- Relativistic Kinematics AppendixDokument13 SeitenRelativistic Kinematics AppendixPRIYANSHU KAUSHIKNoch keine Bewertungen
- Introduction to Koopman Operator Theory for Dynamical SystemsDokument31 SeitenIntroduction to Koopman Operator Theory for Dynamical SystemsArsh UppalNoch keine Bewertungen
- Am Op A PerDokument5 SeitenAm Op A PervenikiranNoch keine Bewertungen
- 3 Discrete Time SystemsDokument40 Seiten3 Discrete Time SystemsNur Razanah Mohd YasinNoch keine Bewertungen
- cs2 PDFDokument84 Seitencs2 PDFAjayNoch keine Bewertungen
- Vibration AnalysisDokument18 SeitenVibration AnalysisSangolla NarahariNoch keine Bewertungen
- State SpaceDokument101 SeitenState SpaceShivam AroraNoch keine Bewertungen
- Attractor: 1 MotivationDokument8 SeitenAttractor: 1 MotivationChampumaharajNoch keine Bewertungen
- Setting VPO in FNDokument13 SeitenSetting VPO in FNThavanayagam EalasukanthanNoch keine Bewertungen
- Regulator problemDokument10 SeitenRegulator problemcarriegosNoch keine Bewertungen
- Nonlinear System Analysis and ControlDokument88 SeitenNonlinear System Analysis and ControlElvis TsangNoch keine Bewertungen
- State SpaceDokument48 SeitenState SpacekanchiNoch keine Bewertungen
- A. H. Taub - Relativistic Fluid MechanicsDokument33 SeitenA. H. Taub - Relativistic Fluid MechanicsJuaxmawNoch keine Bewertungen
- Dixon SystemsDokument15 SeitenDixon SystemsSteve Thomas ForsterNoch keine Bewertungen
- Control of Unstable Periodic Orbits Coexisted With The Strange AttractorDokument7 SeitenControl of Unstable Periodic Orbits Coexisted With The Strange AttractorInternational Journal of computational Engineering research (IJCER)Noch keine Bewertungen
- CT and DT Signals, Systems and PropertiesDokument69 SeitenCT and DT Signals, Systems and PropertiesSivaKumar AnandanNoch keine Bewertungen
- Markov Chain Monte CarloDokument29 SeitenMarkov Chain Monte Carlomurdanetap957Noch keine Bewertungen
- Nonlinear Control Systems 1. - Introduction To Nonlinear SystemsDokument54 SeitenNonlinear Control Systems 1. - Introduction To Nonlinear SystemsGech ManNoch keine Bewertungen
- Ic Tech Report 199704Dokument28 SeitenIc Tech Report 199704Rafael Gonçalves de LimaNoch keine Bewertungen
- The Radially Vibrating Spherical Quantum BilliardDokument12 SeitenThe Radially Vibrating Spherical Quantum BilliardJosé Rojas OlavarríaNoch keine Bewertungen
- Contraction PDFDokument27 SeitenContraction PDFMauriNoch keine Bewertungen
- Chapter 1Dokument32 SeitenChapter 1Cikgu Manimaran KanayesanNoch keine Bewertungen
- Midterm Review Cds 101Dokument4 SeitenMidterm Review Cds 101Cristhian DelgadoNoch keine Bewertungen
- About Robust Control On Nonlinear Chaotic Oscillators: Mihaela ClejuDokument5 SeitenAbout Robust Control On Nonlinear Chaotic Oscillators: Mihaela ClejuBodoShowNoch keine Bewertungen
- Lecture 3 - 2Dokument42 SeitenLecture 3 - 2faruktokuslu16Noch keine Bewertungen
- Professor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaDokument120 SeitenProfessor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaAhmet KılıçNoch keine Bewertungen
- Chapter 1Dokument8 SeitenChapter 1hitesh89Noch keine Bewertungen
- Hopfield 1slideDokument55 SeitenHopfield 1slideJosimar ChireNoch keine Bewertungen
- Nonl MechDokument59 SeitenNonl MechDelila Rahmanovic DemirovicNoch keine Bewertungen
- A Brief Introduction To Some Simple Stochastic Processes: Benjamin LindnerDokument28 SeitenA Brief Introduction To Some Simple Stochastic Processes: Benjamin Lindnersahin04Noch keine Bewertungen
- Algebraic Methods in Statistical Mechanics and Quantum Field TheoryVon EverandAlgebraic Methods in Statistical Mechanics and Quantum Field TheoryNoch keine Bewertungen
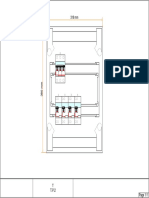
- E5 - T.G. - Device - Front View PDFDokument1 SeiteE5 - T.G. - Device - Front View PDFMaria ClaytonNoch keine Bewertungen
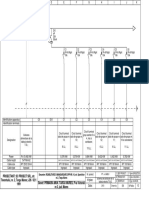
- E5 - T.G. - Complete Diagram PDFDokument5 SeitenE5 - T.G. - Complete Diagram PDFMaria ClaytonNoch keine Bewertungen
- E7 - T.P.2 - Device - Front ViewDokument1 SeiteE7 - T.P.2 - Device - Front ViewMaria ClaytonNoch keine Bewertungen
- Dr. Oetker - Profile PT2Dokument1 SeiteDr. Oetker - Profile PT2Maria ClaytonNoch keine Bewertungen
- E6 - T.P.1 - Complete DiagramDokument1 SeiteE6 - T.P.1 - Complete DiagramMaria ClaytonNoch keine Bewertungen
- Dr. Oetker - Profile PT4Dokument1 SeiteDr. Oetker - Profile PT4Maria ClaytonNoch keine Bewertungen
- E7 - T.P.2 - Complete DiagramDokument1 SeiteE7 - T.P.2 - Complete DiagramMaria ClaytonNoch keine Bewertungen
- E9 - T.M.2 - Complete DiagramDokument2 SeitenE9 - T.M.2 - Complete DiagramMaria ClaytonNoch keine Bewertungen
- E9 - T.M.2 - Complete Diagram-1Dokument2 SeitenE9 - T.M.2 - Complete Diagram-1Maria ClaytonNoch keine Bewertungen
- E8 - T.M.1 - Complete DiagramDokument2 SeitenE8 - T.M.1 - Complete DiagramMaria ClaytonNoch keine Bewertungen
- Dr. Oetker - Profile PT14Dokument1 SeiteDr. Oetker - Profile PT14Maria ClaytonNoch keine Bewertungen
- Dr. Oetker - Profile PT3Dokument1 SeiteDr. Oetker - Profile PT3Maria ClaytonNoch keine Bewertungen
- Lang Chaos TocDokument2 SeitenLang Chaos TocMaria ClaytonNoch keine Bewertungen
- Invitatie Participare V25 Actualizata3 8 25-08-2016 16-18-18-487Dokument1 SeiteInvitatie Participare V25 Actualizata3 8 25-08-2016 16-18-18-487Maria ClaytonNoch keine Bewertungen
- ReadmeDokument4 SeitenReadmeMaria ClaytonNoch keine Bewertungen
- Nonlinear Dynamics and Chaos Course DescriptionDokument1 SeiteNonlinear Dynamics and Chaos Course DescriptionMaria ClaytonNoch keine Bewertungen
- Protection of Information With ChaosDokument93 SeitenProtection of Information With ChaosMaria ClaytonNoch keine Bewertungen
- Control of Chaos in Excitable Physiological Systems: A Geometric AnalysisDokument6 SeitenControl of Chaos in Excitable Physiological Systems: A Geometric AnalysisMaria ClaytonNoch keine Bewertungen
- 4 - Synchronization of Dynamical SystemsDokument14 Seiten4 - Synchronization of Dynamical SystemsMaria ClaytonNoch keine Bewertungen
- Chaotic Modulation: Alexandru Serbanescu, May, 2008Dokument37 SeitenChaotic Modulation: Alexandru Serbanescu, May, 2008Maria ClaytonNoch keine Bewertungen
- JavaDokument10 SeitenJavaMaria ClaytonNoch keine Bewertungen
- 2 Chaotical GeneratorsDokument44 Seiten2 Chaotical GeneratorsMaria ClaytonNoch keine Bewertungen
- MotorDokument13 SeitenMotorMaria ClaytonNoch keine Bewertungen
- 5 - Chaos in CommunicationDokument34 Seiten5 - Chaos in CommunicationMaria ClaytonNoch keine Bewertungen
- MAINTENANCE SCHEDULEDokument2 SeitenMAINTENANCE SCHEDULEMaria ClaytonNoch keine Bewertungen
- F3 Platforma GunoiDokument2 SeitenF3 Platforma GunoiMaria ClaytonNoch keine Bewertungen
- Applications of Chaotically SystemsDokument10 SeitenApplications of Chaotically SystemsMaria ClaytonNoch keine Bewertungen
- Ep Lab 2Dokument5 SeitenEp Lab 2Maria ClaytonNoch keine Bewertungen
- F3 GazeDokument5 SeitenF3 GazeMaria ClaytonNoch keine Bewertungen
- Materi 2 Academic WritingDokument7 SeitenMateri 2 Academic Writingna03friezaNoch keine Bewertungen
- 14-15 TDP HandbookDokument28 Seiten14-15 TDP Handbookapi-266268398Noch keine Bewertungen
- Report-Picic & NibDokument18 SeitenReport-Picic & NibPrincely TravelNoch keine Bewertungen
- APCHG 2019 ProceedingsDokument69 SeitenAPCHG 2019 ProceedingsEnrico SocoNoch keine Bewertungen
- Primer To Using Stampplot® Pro Standard User LicensedDokument21 SeitenPrimer To Using Stampplot® Pro Standard User LicensedSandy Rachman AdrianNoch keine Bewertungen
- New Text DocumentDokument8 SeitenNew Text DocumentDhaniNoch keine Bewertungen
- Ehlers-Danlos Syndromes (EDS) : Fiona Li Pharm D Candidate University of Saint Joseph School of PharmacyDokument22 SeitenEhlers-Danlos Syndromes (EDS) : Fiona Li Pharm D Candidate University of Saint Joseph School of PharmacyDiogo CapellaNoch keine Bewertungen
- Comic Conversations – Lesson Plan & TemplatesDokument15 SeitenComic Conversations – Lesson Plan & TemplatesShengdee OteroNoch keine Bewertungen
- Mil HDBK 1390 PDFDokument31 SeitenMil HDBK 1390 PDFsleepanon4362Noch keine Bewertungen
- (Cambridge Series in Statistical and Probabilistic Mathematics) Gerhard Tutz, Ludwig-Maximilians-Universität Munchen - Regression For Categorical Data-Cambridge University Press (2012)Dokument574 Seiten(Cambridge Series in Statistical and Probabilistic Mathematics) Gerhard Tutz, Ludwig-Maximilians-Universität Munchen - Regression For Categorical Data-Cambridge University Press (2012)shu100% (2)
- Kurukshetra English August '17Dokument60 SeitenKurukshetra English August '17amit2688Noch keine Bewertungen
- Pragmatic Marketing FrameworkDokument2 SeitenPragmatic Marketing FrameworkohgenryNoch keine Bewertungen
- Test Unit 3Dokument2 SeitenTest Unit 3RAMONA SECUNoch keine Bewertungen
- Chapter3 Sampling Proportions PercentagesDokument10 SeitenChapter3 Sampling Proportions PercentagesHamzaZahidNoch keine Bewertungen
- 50 Cool Stories 3000 Hot Words (Master Vocabulary in 50 Days) For GRE Mba Sat Banking SSC DefDokument263 Seiten50 Cool Stories 3000 Hot Words (Master Vocabulary in 50 Days) For GRE Mba Sat Banking SSC DefaravindNoch keine Bewertungen
- Bible Study RisksDokument6 SeitenBible Study RisksVincentNoch keine Bewertungen
- Adjustment DisordersDokument2 SeitenAdjustment DisordersIsabel CastilloNoch keine Bewertungen
- Chap 4 eDokument22 SeitenChap 4 eHira AmeenNoch keine Bewertungen
- Handout of English For PsychologyDokument75 SeitenHandout of English For PsychologyRivan Dwi AriantoNoch keine Bewertungen
- A Cautionary Tale of Psychoanalysis and SchizophreniaDokument30 SeitenA Cautionary Tale of Psychoanalysis and SchizophreniaJona JoyNoch keine Bewertungen
- Discrete Mathematics - Logical EquivalenceDokument9 SeitenDiscrete Mathematics - Logical EquivalenceEisha IslamNoch keine Bewertungen
- 2 - RUBRIC PHY110 (For Student)Dokument3 Seiten2 - RUBRIC PHY110 (For Student)Puteri AaliyyaNoch keine Bewertungen
- EY The Cfo Perspective at A Glance Profit or LoseDokument2 SeitenEY The Cfo Perspective at A Glance Profit or LoseAayushi AroraNoch keine Bewertungen
- Bombardier CityfloDokument14 SeitenBombardier CityfloBiju KmNoch keine Bewertungen
- Reconsidering Puerto Rico's Status After 116 Years of Colonial RuleDokument3 SeitenReconsidering Puerto Rico's Status After 116 Years of Colonial RuleHéctor Iván Arroyo-SierraNoch keine Bewertungen
- Narasimha EngDokument33 SeitenNarasimha EngSachin SinghNoch keine Bewertungen
- Universitas Alumni Psikotest LolosDokument11 SeitenUniversitas Alumni Psikotest LolosPsikotes BVKNoch keine Bewertungen
- The City - Populus' As A Self-Governing CorporationDokument24 SeitenThe City - Populus' As A Self-Governing Corporation马寅秋Noch keine Bewertungen
- Physical Education For Class - 11thDokument19 SeitenPhysical Education For Class - 11thdjjagu908Noch keine Bewertungen
- The Road To Privatization: TQM and Business Planning: Bennington, Lynne Cummane, JamesDokument11 SeitenThe Road To Privatization: TQM and Business Planning: Bennington, Lynne Cummane, JamesBojan KovacevicNoch keine Bewertungen