Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
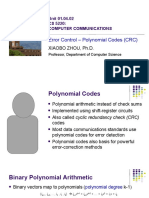
- Error Control - Polynomial Codes (CRC) : Unit 01.04.02 CS 5220: Computer CommunicationsDokument12 SeitenError Control - Polynomial Codes (CRC) : Unit 01.04.02 CS 5220: Computer CommunicationsViswanath KalannagariNoch keine Bewertungen
- Apriori AlgorithmDokument9 SeitenApriori AlgorithmAlshabwani SalehNoch keine Bewertungen
- Test Bank For Graphical Approach To College Algebra 4th Edition by John Hornsby Lial RockswoldDokument15 SeitenTest Bank For Graphical Approach To College Algebra 4th Edition by John Hornsby Lial RockswoldotamendisNoch keine Bewertungen
- Calculus Single and Multivariable 6th Edition Hughes Hallett Solutions ManualDokument67 SeitenCalculus Single and Multivariable 6th Edition Hughes Hallett Solutions Manualmichaeljosephtjqexmgfok100% (30)
- 21 - HW 1.2 - Math 21 - 21C, Section 2553, Spring 2023 - WebAssignDokument18 Seiten21 - HW 1.2 - Math 21 - 21C, Section 2553, Spring 2023 - WebAssignSomia AliNoch keine Bewertungen
- MathCAD Lecture 2 PDFDokument20 SeitenMathCAD Lecture 2 PDFJoshua OmolewaNoch keine Bewertungen
- Pythagoras' Theorem (F) QPDokument9 SeitenPythagoras' Theorem (F) QPMuhammad Asim RazaNoch keine Bewertungen
- MEH - Advanced Techniques in ANSYS Workbench MeshingDokument16 SeitenMEH - Advanced Techniques in ANSYS Workbench MeshingKalista BettiNoch keine Bewertungen
- Rnsit Ds Lab ManualDokument34 SeitenRnsit Ds Lab ManualSandy BujjiNoch keine Bewertungen
- Chapter 3: DeterminantsDokument12 SeitenChapter 3: DeterminantsMas GundNoch keine Bewertungen
- Solution of Weighted Residual Problems by Using Galerkin's MethodDokument3 SeitenSolution of Weighted Residual Problems by Using Galerkin's MethodAbel LopezNoch keine Bewertungen
- Solve Literal EquationsDokument6 SeitenSolve Literal Equationskim taehyungNoch keine Bewertungen
- Time and WorkDokument28 SeitenTime and WorkNeoz Sharan0% (1)
- LCD 03 Exercise 1Dokument25 SeitenLCD 03 Exercise 1Raju SinghNoch keine Bewertungen
- Math-PPT WEEK 3Dokument23 SeitenMath-PPT WEEK 3LOVELY MAE GLUDONoch keine Bewertungen
- Gaussian Elimination TechniquesDokument27 SeitenGaussian Elimination TechniquesFahad MahmoodNoch keine Bewertungen
- An Introduction To Support Vector MachinesDokument22 SeitenAn Introduction To Support Vector Machinesfarheen shaikhNoch keine Bewertungen
- 6 Sequence and Series of Functions 6 1 SDokument12 Seiten6 Sequence and Series of Functions 6 1 SAseh RonaldNoch keine Bewertungen
- Reflection-Mirror Through An Arbitrary PlaneDokument12 SeitenReflection-Mirror Through An Arbitrary PlaneIgor GjorgjievNoch keine Bewertungen
- DSP ExercisesDokument91 SeitenDSP ExercisesRoumen GuhaNoch keine Bewertungen
- Calculus FormulaDokument2 SeitenCalculus FormulaGeramagliquiangNoch keine Bewertungen
- Data Structures and Algorithms: Lecture Notes 1Dokument35 SeitenData Structures and Algorithms: Lecture Notes 1manasa008Noch keine Bewertungen
- Business Academic Mathematics (Reference Text Book 2)Dokument328 SeitenBusiness Academic Mathematics (Reference Text Book 2)John ChristoperNoch keine Bewertungen
- 23mst124tma04 BDokument8 Seiten23mst124tma04 BThomas RaffaëllyNoch keine Bewertungen
- Probability Level-I: Jeemain - GuruDokument6 SeitenProbability Level-I: Jeemain - Guruanwa1Noch keine Bewertungen
- Math Question Bank 2023Dokument138 SeitenMath Question Bank 2023tirumalaNoch keine Bewertungen
- Complex Vector Spaces PDFDokument42 SeitenComplex Vector Spaces PDFmechmaster4uNoch keine Bewertungen
- Topologies for Homeomorphism GroupsDokument18 SeitenTopologies for Homeomorphism GroupsGuido FranchettiNoch keine Bewertungen
- Groups properties and symmetriesDokument3 SeitenGroups properties and symmetriesDean YuNoch keine Bewertungen
- Lecture 14 Convergence Tests For SeriesDokument2 SeitenLecture 14 Convergence Tests For SeriesShresth SharmaNoch keine Bewertungen