Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Integrated Automation SystemDokument28 SeitenIntegrated Automation SystemJeffrey ArandiaNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Instrument Installation Hook Up DrawingsDokument0 SeitenInstrument Installation Hook Up DrawingsHicoolguy Riq33% (3)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Spec A075Dokument1 SeiteSpec A075Jeffrey ArandiaNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- RCS Intermediate PressureDokument1 SeiteRCS Intermediate PressureJeffrey ArandiaNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Direct-Buried Installation of Fiber Optic CableDokument9 SeitenDirect-Buried Installation of Fiber Optic CableTahar HajjiNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Middle East ReferencesDokument12 SeitenMiddle East ReferencesJeffrey ArandiaNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
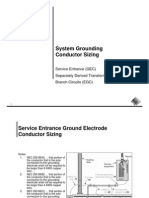
- Ground Conductor SizingDokument16 SeitenGround Conductor SizingelipholebNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- NEMAratings - IPequivalent - Degree of Protection Chart PDFDokument1 SeiteNEMAratings - IPequivalent - Degree of Protection Chart PDFJeffrey ArandiaNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Spec A075Dokument1 SeiteSpec A075Jeffrey ArandiaNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- CurrentRatings PDFDokument0 SeitenCurrentRatings PDFVirajitha MaddumabandaraNoch keine Bewertungen
- Install Fieldbus SystemsDokument102 SeitenInstall Fieldbus SystemsRajib Nag100% (1)
- 6th Central Pay Commission Salary CalculatorDokument15 Seiten6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Leak Detection System - Mott MacDonaldDokument7 SeitenLeak Detection System - Mott MacDonaldJeffrey ArandiaNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- PLM - White PaperDokument63 SeitenPLM - White PaperJeffrey ArandiaNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Testing & Commissioning Procedure (Electrical)Dokument100 SeitenTesting & Commissioning Procedure (Electrical)Roland Nicolas100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- SE30 Lightning Prot. BookletDokument140 SeitenSE30 Lightning Prot. BookletJeffrey ArandiaNoch keine Bewertungen
- Ground Conductor SizingDokument16 SeitenGround Conductor SizingelipholebNoch keine Bewertungen
- CE02 C18 510 Booklet (Habilitation-Safety)Dokument93 SeitenCE02 C18 510 Booklet (Habilitation-Safety)Jeffrey Arandia100% (2)
- Standard Electrical SymbolsDokument40 SeitenStandard Electrical Symbolssilviamenegazzo100% (13)
- Acceptance Testing SpecificationsDokument87 SeitenAcceptance Testing SpecificationsJeffrey ArandiaNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Lecture7 Industrial Programmable Logic Controllers PlcsDokument61 SeitenLecture7 Industrial Programmable Logic Controllers PlcsJeffrey ArandiaNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- CurrentRatings PDFDokument0 SeitenCurrentRatings PDFVirajitha MaddumabandaraNoch keine Bewertungen
- Troubleshooting SCADA Data Acquisition SystemsDokument24 SeitenTroubleshooting SCADA Data Acquisition SystemsXxvic2rxXNoch keine Bewertungen
- Good Grounding PracticesDokument24 SeitenGood Grounding PracticesSeema P DiwanNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Safety For Wiring Methods: By: Komarul FausiyahDokument16 SeitenSafety For Wiring Methods: By: Komarul FausiyahJeffrey ArandiaNoch keine Bewertungen
- ElsafeDokument324 SeitenElsafenavinchopra1986Noch keine Bewertungen
- Grounding and EarthingDokument23 SeitenGrounding and EarthingAmbika Jagmohansingh100% (2)
- Royce Interface Level Analyzer and Sensors: Water & WastewaterDokument8 SeitenRoyce Interface Level Analyzer and Sensors: Water & WastewaterSanjib MohantyNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Cat - Dcs.sis - Controller.pdf 773BDokument2 SeitenCat - Dcs.sis - Controller.pdf 773BOswaldo Andrade100% (1)
- SIRIUS Modular System - Brochure1Dokument6 SeitenSIRIUS Modular System - Brochure1Tuhin SarkarNoch keine Bewertungen
- TOPFLYTECH T8803 PRO User Manual V3.1 PDFDokument19 SeitenTOPFLYTECH T8803 PRO User Manual V3.1 PDFSamuel Liu50% (2)
- Westermo I-Line SDI-8xxDokument16 SeitenWestermo I-Line SDI-8xxnicu_psiNoch keine Bewertungen
- Ekc 102Dokument16 SeitenEkc 102minhdung76npNoch keine Bewertungen
- Device SummaryDokument67 SeitenDevice SummaryZillur RahmanNoch keine Bewertungen
- AB700 P800a1Dokument4 SeitenAB700 P800a1henry barbozaNoch keine Bewertungen
- Chalwyn Product Selection Guide LowResDokument16 SeitenChalwyn Product Selection Guide LowResElsad HuseynovNoch keine Bewertungen
- LiftUnit7 DocumentationDokument44 SeitenLiftUnit7 Documentationangela1590Noch keine Bewertungen
- Zero Sequence CT CatalogueDokument14 SeitenZero Sequence CT CatalogueRanjitKumarNoch keine Bewertungen
- GSM Gate Control: Features: ApplicationsDokument15 SeitenGSM Gate Control: Features: ApplicationsAleksa FatićNoch keine Bewertungen
- Instructions Molded Case Relay Test PlugsDokument16 SeitenInstructions Molded Case Relay Test PlugsWalter CataldoNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- VC6877 RRDokument31 SeitenVC6877 RRSagar HarwaniNoch keine Bewertungen
- Aria User ManualDokument40 SeitenAria User ManualAA100% (3)
- Bioreactor System With ArduinoDokument59 SeitenBioreactor System With ArduinoingnavasNoch keine Bewertungen
- Flameproof Flame Detector Ex d TitleDokument3 SeitenFlameproof Flame Detector Ex d TitleionutenacheNoch keine Bewertungen
- DPR 1000 Manual PDFDokument45 SeitenDPR 1000 Manual PDFedgarcoo100% (1)
- Fire Protection (ATA 26)Dokument73 SeitenFire Protection (ATA 26)Challa AmarsrinuNoch keine Bewertungen
- Instruction Manual of Recloser Controller - R-200Dokument111 SeitenInstruction Manual of Recloser Controller - R-200Rafael David Rincon Villamizar75% (4)
- Induction Motor ProtectionDokument4 SeitenInduction Motor Protectionvijay shindeNoch keine Bewertungen
- KREBS Technequip Knife Gate ValvesDokument20 SeitenKREBS Technequip Knife Gate ValvesOliveira AlmeidaNoch keine Bewertungen
- ANSI/IEEE Standard Electrical Power System Device NumbersDokument12 SeitenANSI/IEEE Standard Electrical Power System Device Numbersrryoga92Noch keine Bewertungen
- Instruction Manual: Dossena S.N.CDokument12 SeitenInstruction Manual: Dossena S.N.CRazvan SasuNoch keine Bewertungen
- Fuji MC SelectionDokument14 SeitenFuji MC SelectionmasakpNoch keine Bewertungen
- SPM-D11 Series: Load Share SynchronizerDokument4 SeitenSPM-D11 Series: Load Share Synchronizersivana rodiahNoch keine Bewertungen
- Gas Turbine Startup Per Missives For GeDokument5 SeitenGas Turbine Startup Per Missives For Gejeromejoe100% (4)
- 108 PDFDokument28 Seiten108 PDFcoulibalyoumarNoch keine Bewertungen
- Diagrama ABS Toyota HiluxDokument2 SeitenDiagrama ABS Toyota HiluxMário Oliveira100% (1)