Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- IEC 60601 1 2 4th Edition PDFDokument21 SeitenIEC 60601 1 2 4th Edition PDFjose david bermudez perez0% (1)
- Ceramic Materials For 5g Wireless CommunicationsDokument14 SeitenCeramic Materials For 5g Wireless CommunicationsMirela CimpanuNoch keine Bewertungen
- Lab 08Dokument17 SeitenLab 08salloum18Noch keine Bewertungen
- Multimeter Parts and FunctionsDokument3 SeitenMultimeter Parts and FunctionsDavid Dela CruzNoch keine Bewertungen
- Combinational Circuits: Design Methods/Arithmetic Circuits: Analysis Procedure Design Methods Gate-Level (SSI) DesignDokument63 SeitenCombinational Circuits: Design Methods/Arithmetic Circuits: Analysis Procedure Design Methods Gate-Level (SSI) DesignPSNoch keine Bewertungen
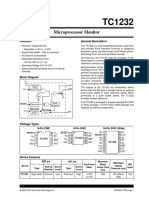
- TC1232Dokument24 SeitenTC1232efremofeNoch keine Bewertungen
- MK4009GALTechnicalNotes RevADokument4 SeitenMK4009GALTechnicalNotes RevAАлександр КарповNoch keine Bewertungen
- TypesDokument1 SeiteTypesGaurav OberoiNoch keine Bewertungen
- ATR4517F1Dokument3 SeitenATR4517F1Derka DemNoch keine Bewertungen
- DQx8-24V 6ES75221BF000AB0 - Datasheet - enDokument3 SeitenDQx8-24V 6ES75221BF000AB0 - Datasheet - enCarlosNoch keine Bewertungen
- Chap12SP1solutions PDFDokument20 SeitenChap12SP1solutions PDFCNoch keine Bewertungen
- 30J124 Datasheet - GT30J124, 600V, 200A, IGBT, Toshiba (Pinout)Dokument4 Seiten30J124 Datasheet - GT30J124, 600V, 200A, IGBT, Toshiba (Pinout)Eldglay Da Silva DomingosNoch keine Bewertungen
- LX6-7W-6GR: Product ClassificationDokument5 SeitenLX6-7W-6GR: Product Classificationjesus alainNoch keine Bewertungen
- School OF Information and Communication Technology: Gautam Budh Nagar, Greater NoidaDokument63 SeitenSchool OF Information and Communication Technology: Gautam Budh Nagar, Greater NoidaPrashant Shukla100% (1)
- Inspection and Cleaning Procedures For Fiber Optic ConnectionsDokument23 SeitenInspection and Cleaning Procedures For Fiber Optic Connectionsnaveed4k143Noch keine Bewertungen
- R-J2 Mate Controller - B81315Dokument181 SeitenR-J2 Mate Controller - B81315Marek Grysko100% (1)
- Lesson Plan in ComputerDokument3 SeitenLesson Plan in ComputerAngelo SorianoNoch keine Bewertungen
- Q3 ReportDokument38 SeitenQ3 ReportAmossy ItozyaNoch keine Bewertungen
- Vector Battery ChargerDokument8 SeitenVector Battery ChargervovobossNoch keine Bewertungen
- CCIE Enterprise Wireless v1 Exam TopicsDokument6 SeitenCCIE Enterprise Wireless v1 Exam TopicsDeepakNoch keine Bewertungen
- Assignment 1: Implementation of A Processor (10marks) : Constant RDST OpcodeDokument6 SeitenAssignment 1: Implementation of A Processor (10marks) : Constant RDST OpcodeTharakram KorripatiNoch keine Bewertungen
- 0000551-Брошюра Consilium VDR F2Dokument8 Seiten0000551-Брошюра Consilium VDR F2varalil FebNoch keine Bewertungen
- Touch Panel ComputersDokument12 SeitenTouch Panel ComputersPaulina CataldoNoch keine Bewertungen
- An PRC 119 Programming TroubleshootingDokument20 SeitenAn PRC 119 Programming Troubleshootingdragon4036100% (1)
- Classification - Types of ComputersDokument36 SeitenClassification - Types of ComputersBudigoy IbarraNoch keine Bewertungen
- 9 - Seção 6C6D - Sistema de Excitação Transição de ControleDokument6 Seiten9 - Seção 6C6D - Sistema de Excitação Transição de ControleJustin Hernandez100% (1)
- Bluetooth Wifi Wimax LTE SCGDokument57 SeitenBluetooth Wifi Wimax LTE SCGRama KrishnaNoch keine Bewertungen
- 3GPP TS 29.060: Technical SpecificationDokument153 Seiten3GPP TS 29.060: Technical Specificationacer_7Noch keine Bewertungen
- KLT RekhaDokument15 SeitenKLT RekhaYuli SyarifNoch keine Bewertungen
- Um IcrDokument78 SeitenUm Icrklx12Noch keine Bewertungen