Das könnte Ihnen auch gefallen
- Industrial Robotics: The Heart of Modern ManufacturingDokument36 SeitenIndustrial Robotics: The Heart of Modern ManufacturingGaneshNoch keine Bewertungen
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]Von EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Bewertung: 1 von 5 Sternen1/5 (1)
- Industrial Robotics (Unit 1 & 2)Dokument76 SeitenIndustrial Robotics (Unit 1 & 2)b_meenakshipriya100% (2)
- Manufacturing Equipment: Industrial Robotics - Introduction Industrial Robotics - IntroductionDokument42 SeitenManufacturing Equipment: Industrial Robotics - Introduction Industrial Robotics - IntroductionpiyushaaquaNoch keine Bewertungen
- Unit 1 Introduction RoboticsDokument48 SeitenUnit 1 Introduction RoboticsJagraj SinghNoch keine Bewertungen
- Robot ArchitecturesDokument72 SeitenRobot ArchitecturesRyder Jhymsen50% (2)
- Industrial Robots and Their Application To ManufacturingDokument32 SeitenIndustrial Robots and Their Application To ManufacturingStoneNoch keine Bewertungen
- ROBOTICS Part4Dokument94 SeitenROBOTICS Part4Sandeep GogadiNoch keine Bewertungen
- Lec02 ManipulatorsDokument7 SeitenLec02 ManipulatorsMohamad YazidNoch keine Bewertungen
- MAR 2013 Course Notes - 16 2008-2009 AutomationDokument4 SeitenMAR 2013 Course Notes - 16 2008-2009 Automationkhchan88Noch keine Bewertungen
- Automated Logistic Robotics Process SystemDokument57 SeitenAutomated Logistic Robotics Process SystemMOHAMMED ALI MOHAMMED ZABBANINoch keine Bewertungen
- Ie 450 PP 8Dokument37 SeitenIe 450 PP 8vijayasarathy2013Noch keine Bewertungen
- Lec 2 Robot ManipulatorsDokument14 SeitenLec 2 Robot ManipulatorsAjanthan AlagaratnamNoch keine Bewertungen
- 2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionDokument62 Seiten2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionSPARSH RAJNoch keine Bewertungen
- R&A Module 1ADokument78 SeitenR&A Module 1ANagaraj BhatNoch keine Bewertungen
- Automation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyDokument30 SeitenAutomation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyHaider-e-Karar100% (1)
- Robotics Lectures-1 For Final Year Indir PDFDokument93 SeitenRobotics Lectures-1 For Final Year Indir PDFume habibaNoch keine Bewertungen
- Introduction To RoboticsDokument35 SeitenIntroduction To Roboticsرهف عبد اللهNoch keine Bewertungen
- Current & Future Trends in RoboticsDokument32 SeitenCurrent & Future Trends in Roboticsbooks sanNoch keine Bewertungen
- Controls and Systems EngineeringDokument22 SeitenControls and Systems EngineeringSheena BejasaNoch keine Bewertungen
- Automatic Job Rejection & Counting SystemDokument4 SeitenAutomatic Job Rejection & Counting Systemankush belkarNoch keine Bewertungen
- Presentation On Robotics: Presented By: Akshay WadalkarDokument17 SeitenPresentation On Robotics: Presented By: Akshay WadalkarKRZ. Arpon Root HackerNoch keine Bewertungen
- Generic Specifications of Industrial RobotsDokument21 SeitenGeneric Specifications of Industrial RobotsDeen Dayal Upadhyay Kaushal Kendra OfficeNoch keine Bewertungen
- AB - 18ME15 - EME - AMS - NINE Question of TEN Answered PDFDokument9 SeitenAB - 18ME15 - EME - AMS - NINE Question of TEN Answered PDFVarun BharadwajNoch keine Bewertungen
- Introduction To RoboticsDokument60 SeitenIntroduction To RoboticsJOEL STEPHEN 19BEE0262Noch keine Bewertungen
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDokument77 SeitenActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNoch keine Bewertungen
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDokument77 SeitenActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNoch keine Bewertungen
- What Subsystems Make Up A Robot? (ASM-PCS) A B C D E F: ISAAC ASIMOV - Term Was Coined and FIRSTDokument11 SeitenWhat Subsystems Make Up A Robot? (ASM-PCS) A B C D E F: ISAAC ASIMOV - Term Was Coined and FIRSTMizhar GerardoNoch keine Bewertungen
- Introduction To ROBOTICSDokument25 SeitenIntroduction To ROBOTICSNyandaMadili MalashiNoch keine Bewertungen
- Robotics - Lecture NotesDokument54 SeitenRobotics - Lecture Notesapi-315106094Noch keine Bewertungen
- Advanced Robotics PDFDokument47 SeitenAdvanced Robotics PDFAubs ChomaNoch keine Bewertungen
- Lecture 2 - Components and SubsystemsDokument43 SeitenLecture 2 - Components and SubsystemsSamNoch keine Bewertungen
- Chapter 1 Fundamentals of RobotDokument43 SeitenChapter 1 Fundamentals of RobotAmanMauryaNoch keine Bewertungen
- Introduction To Concepts in RoboticsDokument26 SeitenIntroduction To Concepts in RoboticsزهديابوانسNoch keine Bewertungen
- DV04PUB11 Study GuideDokument5 SeitenDV04PUB11 Study GuidetharNoch keine Bewertungen
- Emea05 068Dokument50 SeitenEmea05 068RenatoMattioliNoch keine Bewertungen
- Unit - 3 Manipulators, Actuators and End Effectors: Prepared by Asst. Prof - Dept. of ICEDokument66 SeitenUnit - 3 Manipulators, Actuators and End Effectors: Prepared by Asst. Prof - Dept. of ICESharmila83Noch keine Bewertungen
- Module 1Dokument45 SeitenModule 1yashpalsingh80726Noch keine Bewertungen
- RKD Unit 1 StudentDokument40 SeitenRKD Unit 1 StudentdharaniNoch keine Bewertungen
- Arc Welding RobotDokument33 SeitenArc Welding Robotrakeshkaushik100% (1)
- Basics of Robotics 24.06.2020Dokument25 SeitenBasics of Robotics 24.06.2020prabhaNoch keine Bewertungen
- RoboticsDokument37 SeitenRobotics9944805552Noch keine Bewertungen
- RoboticsDokument107 SeitenRoboticsNalaiza ToribioNoch keine Bewertungen
- Unit 1Dokument65 SeitenUnit 1Sagar MaruthiNoch keine Bewertungen
- 1 - Practical Application of Robot SafetyDokument68 Seiten1 - Practical Application of Robot Safetydavev2005100% (1)
- Robotics Unit-1Dokument104 SeitenRobotics Unit-1S19IT1215 HarshithaNoch keine Bewertungen
- Industrial RoboticsDokument77 SeitenIndustrial RoboticsIslam Fouad100% (4)
- Lengan Ronor EngeneringDokument20 SeitenLengan Ronor EngeneringFrans MujiNoch keine Bewertungen
- On 6 Month Training in TATA TechnologiesDokument30 SeitenOn 6 Month Training in TATA TechnologiesPrince DhanjuNoch keine Bewertungen
- Robotics Note MDokument36 SeitenRobotics Note MrajeshkunuNoch keine Bewertungen
- Space Robotics: Presented by Abc IV-Btech Mechnical EngineeringDokument36 SeitenSpace Robotics: Presented by Abc IV-Btech Mechnical EngineeringVinayak PaneriNoch keine Bewertungen
- SCARA Robotic Arm FinalDokument28 SeitenSCARA Robotic Arm FinaljohnNoch keine Bewertungen
- Liebherr RMG Technical Description Rail-Mounted Container Stacking CranesDokument4 SeitenLiebherr RMG Technical Description Rail-Mounted Container Stacking CranesMuhammad Jazztyan Indra PradanaNoch keine Bewertungen
- Characteristics of Actuators:: SCARA RobotDokument3 SeitenCharacteristics of Actuators:: SCARA RobotMechanical EngineeringNoch keine Bewertungen
- Commonly Used For:: CartesianDokument9 SeitenCommonly Used For:: CartesianpmagrawalNoch keine Bewertungen
- Ipe 419 Cim May 2022Dokument134 SeitenIpe 419 Cim May 2022Indranil NiloyNoch keine Bewertungen
- I&M Lab ManualDokument20 SeitenI&M Lab ManualSaad MalikNoch keine Bewertungen
- FALLSEM2022-23 MEE1030 ETH VL2022230100648 REFERENCE MATERIAL Unit-IDokument37 SeitenFALLSEM2022-23 MEE1030 ETH VL2022230100648 REFERENCE MATERIAL Unit-IYashNoch keine Bewertungen
- Toolkits 0908 E WebDokument21 SeitenToolkits 0908 E Webvothanhbinh311099Noch keine Bewertungen
- Ordinary Differential EquationsDokument25 SeitenOrdinary Differential EquationsmanishtopsecretsNoch keine Bewertungen
- Strain Gages: Log Log LogDokument21 SeitenStrain Gages: Log Log LogmanishtopsecretsNoch keine Bewertungen
- Lecture 1Dokument35 SeitenLecture 1manishtopsecretsNoch keine Bewertungen
- Multidimensional Arrays in MatlabDokument16 SeitenMultidimensional Arrays in MatlabmanishtopsecretsNoch keine Bewertungen
- 12 010 Lec15Dokument14 Seiten12 010 Lec15manishtopsecretsNoch keine Bewertungen
- Automation: Name of The Faculty: Manish Dhawan UID: 14630 E-Mail ID: Manish.14630@lpu - Co.inDokument11 SeitenAutomation: Name of The Faculty: Manish Dhawan UID: 14630 E-Mail ID: Manish.14630@lpu - Co.inmanishtopsecretsNoch keine Bewertungen
- CS 401: Applied Scientific Computing With MATLABDokument21 SeitenCS 401: Applied Scientific Computing With MATLABmanishtopsecretsNoch keine Bewertungen
- Mec406 - Mechanical VibrationDokument10 SeitenMec406 - Mechanical VibrationmanishtopsecretsNoch keine Bewertungen
- Vibration Example:-DealsDokument10 SeitenVibration Example:-DealsmanishtopsecretsNoch keine Bewertungen
- Cell Arrays and Structures: Learning Objectives TopicsDokument22 SeitenCell Arrays and Structures: Learning Objectives TopicsmanishtopsecretsNoch keine Bewertungen
- CHAPTER 2design Against Static LoadDokument33 SeitenCHAPTER 2design Against Static LoadmanishtopsecretsNoch keine Bewertungen
- Vibration Example:-DealsDokument10 SeitenVibration Example:-DealsmanishtopsecretsNoch keine Bewertungen
- GoverningDokument15 SeitenGoverningmanishtopsecrets100% (1)
- Lovelyprofessional University: Tutorial - Bars of Varying Cross Section SOM MEC040 Time Required: 60 MinutesDokument6 SeitenLovelyprofessional University: Tutorial - Bars of Varying Cross Section SOM MEC040 Time Required: 60 MinutesmanishtopsecretsNoch keine Bewertungen
- Mec406:Mechanical Vibration: Page:1/1 Print Date: 8/7/2013 9:05:26 AMDokument1 SeiteMec406:Mechanical Vibration: Page:1/1 Print Date: 8/7/2013 9:05:26 AMmanishtopsecretsNoch keine Bewertungen
- Mec223:Design of Machine Elements: Page:1/2 Print Date: 8/7/2013 9:06:02 AMDokument2 SeitenMec223:Design of Machine Elements: Page:1/2 Print Date: 8/7/2013 9:06:02 AMmanishtopsecretsNoch keine Bewertungen
- Mec406 - Mechanical VibrationDokument9 SeitenMec406 - Mechanical VibrationmanishtopsecretsNoch keine Bewertungen
- Thermal StressDokument104 SeitenThermal Stressmanishtopsecrets100% (1)
- Time Allowed: 45 Minutes Max. Marks: 30 Name: Roll Number: Section: JM102 Couse Code: - MEC040Dokument2 SeitenTime Allowed: 45 Minutes Max. Marks: 30 Name: Roll Number: Section: JM102 Couse Code: - MEC040manishtopsecretsNoch keine Bewertungen
- Pressure MeasurementDokument8 SeitenPressure MeasurementmanishtopsecretsNoch keine Bewertungen
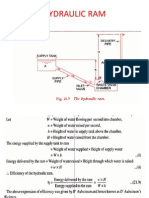
- HydraulicsDokument21 SeitenHydraulicsmanishtopsecretsNoch keine Bewertungen
- Tutorial Sheet MEC067Dokument1 SeiteTutorial Sheet MEC067manishtopsecretsNoch keine Bewertungen
- Pump: Definition: The Pressure Energy Is Increased by Creating A Region of Low Pressure Low Inlet PressureDokument3 SeitenPump: Definition: The Pressure Energy Is Increased by Creating A Region of Low Pressure Low Inlet PressuremanishtopsecretsNoch keine Bewertungen
- Lecture 24 - Strength Analysis of FuselagesDokument6 SeitenLecture 24 - Strength Analysis of FuselagesgavinNoch keine Bewertungen
- Exercises in Cell BiologyDokument65 SeitenExercises in Cell BiologyZvijezdaNoch keine Bewertungen
- B-290 - Spray Dry ManualDokument57 SeitenB-290 - Spray Dry ManualAnonymous KzgvEj1Noch keine Bewertungen
- INFO-Sheet Fumis ALPHADokument2 SeitenINFO-Sheet Fumis ALPHAAnthony GilmoreNoch keine Bewertungen
- 1 - Pdfsam - 51 - Pdfsam - Jane Bennett Vibrant Matter A Political Ecology of Things 2010 PDFDokument25 Seiten1 - Pdfsam - 51 - Pdfsam - Jane Bennett Vibrant Matter A Political Ecology of Things 2010 PDFAnna PrzytomskaNoch keine Bewertungen
- Higher School Physics Linear Motion Q&ADokument9 SeitenHigher School Physics Linear Motion Q&AGkid GkidNoch keine Bewertungen
- Lab 8 Ee ReportDokument10 SeitenLab 8 Ee Reportshikazi ziki100% (1)
- Fire Resisting Properties of Common Building MterialsDokument2 SeitenFire Resisting Properties of Common Building MterialssuryakantameNoch keine Bewertungen
- Section 133123Dokument11 SeitenSection 133123Dian Aplimon JohannisNoch keine Bewertungen
- t9 PDFDokument21 Seitent9 PDFselvaganapathy1992Noch keine Bewertungen
- Zhang2021 Article TransportPhenomenonFlowFieldAnDokument11 SeitenZhang2021 Article TransportPhenomenonFlowFieldAnJoão Victor OsórioNoch keine Bewertungen
- Module1 - MagnetismDokument35 SeitenModule1 - MagnetismJoicsha Nicole FerrerNoch keine Bewertungen
- Basics of Mining and Mineral ProcessingDokument179 SeitenBasics of Mining and Mineral Processingminerales&materiales100% (6)
- AREMA MRE Chapter 15 2017 PDFDokument5 SeitenAREMA MRE Chapter 15 2017 PDFbarbadoblanco100% (1)
- Sieve Analysis of Soil: By: Muhammad Firdaus, ST, MTDokument12 SeitenSieve Analysis of Soil: By: Muhammad Firdaus, ST, MTdaus_parisi100% (1)
- Qualitative Analysis of CationsDokument12 SeitenQualitative Analysis of CationsRegina Morales0% (1)
- Shodex SEC ColumnsDokument40 SeitenShodex SEC ColumnsAlfred HuangNoch keine Bewertungen
- Subject Review of IB 2023 Year - 1 - P2-2Dokument66 SeitenSubject Review of IB 2023 Year - 1 - P2-2Duru SavdaNoch keine Bewertungen
- Set Theory For The Working Mathematician - Krzysztof Ciesielski - 1997Dokument244 SeitenSet Theory For The Working Mathematician - Krzysztof Ciesielski - 1997Jack Bullets100% (3)
- D and F Block Elements-1Dokument12 SeitenD and F Block Elements-1ilias1973Noch keine Bewertungen
- Syllabus - Mathematical EconomicsDokument2 SeitenSyllabus - Mathematical EconomicsMRVNoch keine Bewertungen
- Is 2974 Part 4 1979 Indian Standard Code of Practice For Design and Construction of Machine Foundations - Part 4 Foundations For Rotary Type Machines of Low Frequency PDFDokument23 SeitenIs 2974 Part 4 1979 Indian Standard Code of Practice For Design and Construction of Machine Foundations - Part 4 Foundations For Rotary Type Machines of Low Frequency PDFBibhu DattaNoch keine Bewertungen
- Quality Assurance Plan For Civil4mDokument3 SeitenQuality Assurance Plan For Civil4mMohammed Abdul BaseerNoch keine Bewertungen
- Nastran DST Group TN 1700Dokument69 SeitenNastran DST Group TN 1700Minh LeNoch keine Bewertungen
- Models - Rf.plasmonic Wire Grating PDFDokument26 SeitenModels - Rf.plasmonic Wire Grating PDFrak999Noch keine Bewertungen
- Inclined Sound Radiator Using Flexural Wave in HoneycombDokument2 SeitenInclined Sound Radiator Using Flexural Wave in Honeycombdonald141Noch keine Bewertungen
- Semikron Datasheet Skiip 23ac126v1 25231080Dokument4 SeitenSemikron Datasheet Skiip 23ac126v1 25231080Antonio Carlos CardosoNoch keine Bewertungen
- All1 58Dokument61 SeitenAll1 58arisNoch keine Bewertungen
- Calculus For Business and Social SciencesDokument5 SeitenCalculus For Business and Social SciencesMarchol PingkiNoch keine Bewertungen
- Msa Ace Inv 1Dokument11 SeitenMsa Ace Inv 1api-413796204Noch keine Bewertungen
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyVon EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyBewertung: 3.5 von 5 Sternen3.5/5 (111)
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4 von 5 Sternen4/5 (6)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldVon EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (55)
- Algorithms to Live By: The Computer Science of Human DecisionsVon EverandAlgorithms to Live By: The Computer Science of Human DecisionsBewertung: 4.5 von 5 Sternen4.5/5 (722)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Von EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Bewertung: 5 von 5 Sternen5/5 (34)
- Cyber War: The Next Threat to National Security and What to Do About ItVon EverandCyber War: The Next Threat to National Security and What to Do About ItBewertung: 3.5 von 5 Sternen3.5/5 (66)
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyVon EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyBewertung: 4 von 5 Sternen4/5 (51)
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- The E-Myth Revisited: Why Most Small Businesses Don't Work andVon EverandThe E-Myth Revisited: Why Most Small Businesses Don't Work andBewertung: 4.5 von 5 Sternen4.5/5 (709)
- System Error: Where Big Tech Went Wrong and How We Can RebootVon EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootNoch keine Bewertungen
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveVon EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNoch keine Bewertungen
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (229)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceVon EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceBewertung: 5 von 5 Sternen5/5 (5)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyVon EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNoch keine Bewertungen
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumVon EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumBewertung: 3 von 5 Sternen3/5 (12)
- Mini Farming: Self-Sufficiency on 1/4 AcreVon EverandMini Farming: Self-Sufficiency on 1/4 AcreBewertung: 4 von 5 Sternen4/5 (76)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- The Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeVon EverandThe Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeBewertung: 4.5 von 5 Sternen4.5/5 (99)
- Reality+: Virtual Worlds and the Problems of PhilosophyVon EverandReality+: Virtual Worlds and the Problems of PhilosophyBewertung: 4 von 5 Sternen4/5 (24)
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesVon EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesNoch keine Bewertungen
- Restoration Agriculture: Real-World Permaculture for FarmersVon EverandRestoration Agriculture: Real-World Permaculture for FarmersBewertung: 4.5 von 5 Sternen4.5/5 (86)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerVon EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerBewertung: 4.5 von 5 Sternen4.5/5 (44)
- AI Superpowers: China, Silicon Valley, and the New World OrderVon EverandAI Superpowers: China, Silicon Valley, and the New World OrderBewertung: 4.5 von 5 Sternen4.5/5 (398)


![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-1-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)