Das könnte Ihnen auch gefallen
- ViscoelasticityDokument11 SeitenViscoelasticitymchilwesaNoch keine Bewertungen
- Polymer Carrer 2Dokument35 SeitenPolymer Carrer 2Ếch OrsonNoch keine Bewertungen
- Viscoelastic Behavior of Polymers PDFDokument9 SeitenViscoelastic Behavior of Polymers PDFchiuchan888Noch keine Bewertungen
- Polymer Mass: Principles of Product DesignDokument27 SeitenPolymer Mass: Principles of Product DesignOladimeji AlabiNoch keine Bewertungen
- Embedded Crack Model: I. Basic Formulation: Milan Jirãasek and Thomas ZimmermannDokument22 SeitenEmbedded Crack Model: I. Basic Formulation: Milan Jirãasek and Thomas ZimmermannRubén Darío RodariNoch keine Bewertungen
- Deformation and Flow of Solids: Colloqijium Madrid September 26-39, 1965 R. GrammelDokument14 SeitenDeformation and Flow of Solids: Colloqijium Madrid September 26-39, 1965 R. GrammelSapari VelNoch keine Bewertungen
- Viscoelasticity - RheologicalDokument10 SeitenViscoelasticity - RheologicalsaltyNoch keine Bewertungen
- Viscoelastic Nature in PolymersDokument28 SeitenViscoelastic Nature in PolymersaliNoch keine Bewertungen
- Thermal Activation in Atomic Friction: Revisiting The Theoretical AnalysisDokument8 SeitenThermal Activation in Atomic Friction: Revisiting The Theoretical AnalysisSyd BarrettNoch keine Bewertungen
- Physics 3 Summer 1989 Lab 7 - ElasticityDokument12 SeitenPhysics 3 Summer 1989 Lab 7 - ElasticityNck Swamy SwamyNoch keine Bewertungen
- Continuum Mechanics SS 2013Dokument45 SeitenContinuum Mechanics SS 2013zcapg17Noch keine Bewertungen
- Theories of Elastic FailureDokument15 SeitenTheories of Elastic FailurejaishowNoch keine Bewertungen
- f1007b Exam - en Antonio Delgado A01707634Dokument9 Seitenf1007b Exam - en Antonio Delgado A01707634Antonio Delgado SalgadoNoch keine Bewertungen
- Schematic Models of Constitutive Behavior of Solid MaterialsDokument4 SeitenSchematic Models of Constitutive Behavior of Solid MaterialschoopoNoch keine Bewertungen
- Viscoelasticity: ReferencesDokument21 SeitenViscoelasticity: Referencesletter_ashish4444Noch keine Bewertungen
- Reference BooksDokument23 SeitenReference BooksIgor Gabriel Teixeira GómezNoch keine Bewertungen
- Constitutive Equations For Polymer Viscoelasticity Derived From Hierarchical Models in Cases of Failure of Time-Temperature SuperpositionDokument13 SeitenConstitutive Equations For Polymer Viscoelasticity Derived From Hierarchical Models in Cases of Failure of Time-Temperature SuperpositionuygartNoch keine Bewertungen
- Introducton To ThermodynamicsDokument7 SeitenIntroducton To Thermodynamicsdesi_parisNoch keine Bewertungen
- Engineering MaterialsDokument7 SeitenEngineering MaterialsRushikesh WandhekarNoch keine Bewertungen
- Chapter 17 Notes 2Dokument11 SeitenChapter 17 Notes 2Rizwan MalikNoch keine Bewertungen
- Rheological ModelsDokument14 SeitenRheological ModelsCHEENIE MAE SAGUNNoch keine Bewertungen
- Viscoelasticity and Dynamic Mechanical Testing PDFDokument7 SeitenViscoelasticity and Dynamic Mechanical Testing PDFaryanNoch keine Bewertungen
- Generating Line Spectra From Experimental Response1Dokument19 SeitenGenerating Line Spectra From Experimental Response1MEHDI FARROKHINoch keine Bewertungen
- Lecture 20Dokument14 SeitenLecture 20Martha Isabel SernaNoch keine Bewertungen
- Martin Bertrand, Martin Forget and Béla Joós - Entropic Elasticity of Dilated and Contorted Idealized Circular ChainsDokument7 SeitenMartin Bertrand, Martin Forget and Béla Joós - Entropic Elasticity of Dilated and Contorted Idealized Circular ChainsLokosooNoch keine Bewertungen
- Mechanical Properties at High Strain Rates: To Cite This VersionDokument23 SeitenMechanical Properties at High Strain Rates: To Cite This VersionRonaldo AdrianoNoch keine Bewertungen
- Tensors, Stress, Strain, ElasticityDokument10 SeitenTensors, Stress, Strain, ElasticitySiti Cweety MarryNoch keine Bewertungen
- 15 ViscoelasticityDokument30 Seiten15 ViscoelasticityaderancNoch keine Bewertungen
- Physics Including Human Applications ChaDokument12 SeitenPhysics Including Human Applications ChaPanuphong WisangNoch keine Bewertungen
- Strain Hardening Rheology. Rheology Is The Science of Deformation. This Science Poses ADokument8 SeitenStrain Hardening Rheology. Rheology Is The Science of Deformation. This Science Poses Akhudhayer1970Noch keine Bewertungen
- Elasticity, Calorimetry & Thermal Expansion (Teaching Notes)Dokument21 SeitenElasticity, Calorimetry & Thermal Expansion (Teaching Notes)Sankar KumarasamyNoch keine Bewertungen
- Elastic Properties of Materials: GoalsDokument12 SeitenElastic Properties of Materials: GoalsKris OiraNoch keine Bewertungen
- UNIT - 3 - ppt-2Dokument36 SeitenUNIT - 3 - ppt-2neha yarrapothuNoch keine Bewertungen
- Viscoelastic Damping 101: Paul Macioce, Roush Industries, IncDokument3 SeitenViscoelastic Damping 101: Paul Macioce, Roush Industries, IncvdertiNoch keine Bewertungen
- Elastic and Viscoelastic Properties of MetalsDokument11 SeitenElastic and Viscoelastic Properties of MetalsgunapalshettyNoch keine Bewertungen
- Book Nonlinear ModelsDokument60 SeitenBook Nonlinear ModelsEdemir SuarezNoch keine Bewertungen
- Hooke's LawDokument7 SeitenHooke's LawAreeb AhmadNoch keine Bewertungen
- PinheiroBuker EPL PDFDokument6 SeitenPinheiroBuker EPL PDFMario J. PinheiroNoch keine Bewertungen
- Influence of Hysteresis On The Dynamics of Cryogenic LNG Composite HosesDokument10 SeitenInfluence of Hysteresis On The Dynamics of Cryogenic LNG Composite Hosesnjm001Noch keine Bewertungen
- AttachmentDokument11 SeitenAttachmentThian Fang MingNoch keine Bewertungen
- Time-Temperature Behavior of Carbon - Epoxy Laminates PDFDokument15 SeitenTime-Temperature Behavior of Carbon - Epoxy Laminates PDFShabi HadashNoch keine Bewertungen
- Viscoelastic ModellingDokument18 SeitenViscoelastic ModellingNimisha VedantiNoch keine Bewertungen
- Rubber ElasticityDokument65 SeitenRubber ElasticityMohd Bashree Abu Bakar100% (1)
- Tschoegl1989 Chapter EnergyStorageAndDissipationInADokument46 SeitenTschoegl1989 Chapter EnergyStorageAndDissipationInAchopin.wlive.cnNoch keine Bewertungen
- Matt Visser - Traversable Wormholes: Some Simple ExamplesDokument7 SeitenMatt Visser - Traversable Wormholes: Some Simple ExamplesRtpomNoch keine Bewertungen
- Viscoelasticity - WikipediaDokument43 SeitenViscoelasticity - WikipediaEsraa AhmedNoch keine Bewertungen
- Viscoelastic Behaviour of Polymers PDFDokument120 SeitenViscoelastic Behaviour of Polymers PDFSivasankar JeyabaskaranNoch keine Bewertungen
- Theory of Elasticity: Macroscopic Theory Rock As 'Elastic Continuum'Dokument19 SeitenTheory of Elasticity: Macroscopic Theory Rock As 'Elastic Continuum'Aishwarya RajasekarNoch keine Bewertungen
- Elasticity: Ph8151/Engineering PhysicsDokument26 SeitenElasticity: Ph8151/Engineering PhysicsFede PerezNoch keine Bewertungen
- Gas - Dynamics Turrell 1997Dokument164 SeitenGas - Dynamics Turrell 1997B Rajha BharathiNoch keine Bewertungen
- Chapter 12 Simple Harmonic Motion and Waves: Section 12.1 Hooke's LawDokument12 SeitenChapter 12 Simple Harmonic Motion and Waves: Section 12.1 Hooke's LawMarcial Aguilar BarahonaNoch keine Bewertungen
- Topic 8 - Deformation of SolidsDokument8 SeitenTopic 8 - Deformation of Solidsargh67% (3)
- Eyring TheoryDokument5 SeitenEyring Theorymariasp95Noch keine Bewertungen
- Stress and StrainDokument14 SeitenStress and StrainEFRAIM CAMBENoch keine Bewertungen
- Report 5Dokument6 SeitenReport 5Paul Adrian JavénNoch keine Bewertungen
- Etd Chapt 6Dokument69 SeitenEtd Chapt 6Miruna PetriaNoch keine Bewertungen
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4Von EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4Noch keine Bewertungen
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3Von EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3Noch keine Bewertungen
- Mathematical Solution Unifying the Four Fundamental Forces in NatureVon EverandMathematical Solution Unifying the Four Fundamental Forces in NatureNoch keine Bewertungen
- Specifications of LR BendDokument11 SeitenSpecifications of LR BendPrafulla PatilNoch keine Bewertungen
- C150C150M-15 Standard Specification For Portland Cement PDFDokument9 SeitenC150C150M-15 Standard Specification For Portland Cement PDFPrafulla PatilNoch keine Bewertungen
- C150C150M-15 Standard Specification For Portland Cement PDFDokument9 SeitenC150C150M-15 Standard Specification For Portland Cement PDFPrafulla PatilNoch keine Bewertungen
- IRT - CWC Coating Anode InstallationDokument3 SeitenIRT - CWC Coating Anode InstallationPrafulla PatilNoch keine Bewertungen
- Sor BPCL KochiDokument79 SeitenSor BPCL KochiPrafulla PatilNoch keine Bewertungen
- Minutes of Pre Execution Meeting Held On Between: Persons PresentDokument1 SeiteMinutes of Pre Execution Meeting Held On Between: Persons PresentPrafulla PatilNoch keine Bewertungen
- 11 Inspection of Erection PRJ 11 R1Dokument1 Seite11 Inspection of Erection PRJ 11 R1Prafulla PatilNoch keine Bewertungen
- Advanced Strength and Applied ElasticityDokument280 SeitenAdvanced Strength and Applied Elasticityvipulugale67% (3)
- 0901 B 803808 e 4479Dokument7 Seiten0901 B 803808 e 4479SiddharthapachisiaNoch keine Bewertungen
- SugarcaneDokument83 SeitenSugarcaneabrahanNoch keine Bewertungen
- Comparative Investigation of Traditional and Modern Passive Design Strategies To Reduce The Energy Use in Residential Building of West-Maharashtra RegionDokument17 SeitenComparative Investigation of Traditional and Modern Passive Design Strategies To Reduce The Energy Use in Residential Building of West-Maharashtra RegionAnonymous CwJeBCAXp100% (1)
- Solar and Stellar Magnetic Activity - ISBN0521582865 PDFDokument402 SeitenSolar and Stellar Magnetic Activity - ISBN0521582865 PDFOmar Musalem100% (1)
- Crystal Structure Refinement and Hydration Behaviour of Doped Tricalcium AluminateDokument10 SeitenCrystal Structure Refinement and Hydration Behaviour of Doped Tricalcium AluminateJuliano. PQMNoch keine Bewertungen
- Composite Leaf SpringDokument23 SeitenComposite Leaf SpringVijay AnandNoch keine Bewertungen
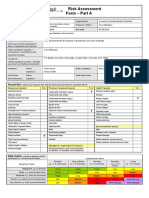
- Risk AssessmentDokument2 SeitenRisk AssessmentFaraiMbudaya0% (1)
- Removal of Gaseous Chlorine From Cylinders and Ton ContainersDokument4 SeitenRemoval of Gaseous Chlorine From Cylinders and Ton Containersmailmaverick8167Noch keine Bewertungen
- Notesch # 18Dokument11 SeitenNotesch # 18ZeeshanMahdiNoch keine Bewertungen
- Material Design and Characterization of High Performance Pervious ConcreteDokument10 SeitenMaterial Design and Characterization of High Performance Pervious Concreteqwefqwefqwe fqwefqwNoch keine Bewertungen
- Marcet BoilerDokument8 SeitenMarcet BoilerOjiSofttouchCharlesNoch keine Bewertungen
- CHAPTER 2design Against Static LoadDokument33 SeitenCHAPTER 2design Against Static LoadmanishtopsecretsNoch keine Bewertungen
- PROBLEM 17.129: SolutionDokument14 SeitenPROBLEM 17.129: SolutiontaNoch keine Bewertungen
- A Sustainable Bioplastic Obtained From Rice StrawDokument12 SeitenA Sustainable Bioplastic Obtained From Rice StrawNovrynda Eko SatriawanNoch keine Bewertungen
- Autolab Brochure 2013 en LRDokument40 SeitenAutolab Brochure 2013 en LRdanidondoniNoch keine Bewertungen
- Ls Series Washer Extractors: Designed To LastDokument4 SeitenLs Series Washer Extractors: Designed To LastTom DavidcsNoch keine Bewertungen
- WEDECO LBXSeriesDokument8 SeitenWEDECO LBXSeriesÁrpád VassNoch keine Bewertungen
- Low Power CMOS VLSI Circuit Design (LPVD) : Dr. Veena S ChakravarthiDokument43 SeitenLow Power CMOS VLSI Circuit Design (LPVD) : Dr. Veena S ChakravarthiVeena SridharNoch keine Bewertungen
- Compozitia Smaltului Si DemineralizareaDokument10 SeitenCompozitia Smaltului Si DemineralizareaMadalina Elena TapeleaNoch keine Bewertungen
- ACCDokument18 SeitenACCSanchit AgarwalNoch keine Bewertungen
- Gas MigrationDokument39 SeitenGas MigrationAli AliievNoch keine Bewertungen
- Anti-Dandruff Shampoo With Zinc Pyrithione: INCI Name, Trade Name Weight % FunctionDokument2 SeitenAnti-Dandruff Shampoo With Zinc Pyrithione: INCI Name, Trade Name Weight % FunctionandreeaNoch keine Bewertungen
- Methanol CarbonylationDokument10 SeitenMethanol CarbonylationhazimraadNoch keine Bewertungen
- Chemguard c333 Ar-Afff 3% MsdsDokument7 SeitenChemguard c333 Ar-Afff 3% MsdsrendydunNoch keine Bewertungen
- Drilling & GroutingDokument18 SeitenDrilling & GroutingSantosh Laxman PatilNoch keine Bewertungen
- Vacuum Bagging ProcessDokument2 SeitenVacuum Bagging ProcessBikram Kesharee NayakNoch keine Bewertungen
- Module - 1 Lecture Notes - 5: Remote Sensing: Introduction and Basic Concepts Spectral Reflectance CurvesDokument13 SeitenModule - 1 Lecture Notes - 5: Remote Sensing: Introduction and Basic Concepts Spectral Reflectance CurvesYogesh SharmaNoch keine Bewertungen
- Dental Materials Reviewer Pt. 10Dokument5 SeitenDental Materials Reviewer Pt. 10Ryo MiyataNoch keine Bewertungen
- Wheatstone BridgeDokument4 SeitenWheatstone BridgeTasnim RahmanNoch keine Bewertungen
- Measurement System BehaviourDokument48 SeitenMeasurement System BehaviourpitapitulNoch keine Bewertungen