Das könnte Ihnen auch gefallen
- Ipl HistoryDokument1 SeiteIpl Historysat1591Noch keine Bewertungen
- UpdatedDokument43 SeitenUpdatedsat1591Noch keine Bewertungen
- The Most Comprehensive Case Study On The IPLDokument11 SeitenThe Most Comprehensive Case Study On The IPLsat1591Noch keine Bewertungen
- List of Controversies Involving The Indian Premier League: Conflicts With The England and Wales Cricket BoardDokument3 SeitenList of Controversies Involving The Indian Premier League: Conflicts With The England and Wales Cricket Boardsat1591Noch keine Bewertungen
- Primary and Secondary DataDokument25 SeitenPrimary and Secondary DataHemant MewaraNoch keine Bewertungen
- Lesson 1 Why International HRMDokument31 SeitenLesson 1 Why International HRMsat1591Noch keine Bewertungen
- Wound Rotor Induction MotorDokument38 SeitenWound Rotor Induction Motorshivamruth24983% (6)
- Anna HazareDokument3 SeitenAnna Hazaresat1591Noch keine Bewertungen
- Pure IT Usability Research CredentialsDokument24 SeitenPure IT Usability Research Credentialssat1591Noch keine Bewertungen
- Micro Presentation TopicsDokument2 SeitenMicro Presentation TopicsAshish DhangerNoch keine Bewertungen
- HVDC Light® Transmission TechnologyDokument23 SeitenHVDC Light® Transmission Technologysat1591Noch keine Bewertungen
- HVDC Light TechnologyDokument13 SeitenHVDC Light Technologysat1591100% (1)
- HVDC Light TechnologyDokument14 SeitenHVDC Light Technologysat1591100% (5)
- HVDC Light PaperDokument11 SeitenHVDC Light Papersat1591Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- AF120 (-S) US, AF230 (-S) US: On/Off, Spring Return, 120 or 230 VACDokument2 SeitenAF120 (-S) US, AF230 (-S) US: On/Off, Spring Return, 120 or 230 VACbotafogoNoch keine Bewertungen
- SGDH Part Number GuideDokument12 SeitenSGDH Part Number GuidecoronaqcNoch keine Bewertungen
- Analisa Perancangan Antena Omni VertikalDokument7 SeitenAnalisa Perancangan Antena Omni VertikalNoorman NoorNoch keine Bewertungen
- Group 5-ElectricalDokument45 SeitenGroup 5-ElectricalKathrean Dane SuarezNoch keine Bewertungen
- Manual Infrared Motion Sensor - GBDokument2 SeitenManual Infrared Motion Sensor - GBMário PereiraNoch keine Bewertungen
- Brochure UK Cast Resin TransformersDokument80 SeitenBrochure UK Cast Resin TransformersAntonio Solís MurilloNoch keine Bewertungen
- General NotesDokument8 SeitenGeneral NotesPradeesh Vijayan (v.prathi)100% (2)
- NCP1399AA, NCP1399BA, NCP1399AC, NCP1399AF High Performance Current Mode Resonant Controller With Integrated High-Voltage DriversDokument44 SeitenNCP1399AA, NCP1399BA, NCP1399AC, NCP1399AF High Performance Current Mode Resonant Controller With Integrated High-Voltage DriversGoensNoch keine Bewertungen
- Integrated Receiver Including Both Receiver Channel and TDC For A Pulsed Time-of-Flight Laser Rangefinder With Cm-Level AccuracyDokument12 SeitenIntegrated Receiver Including Both Receiver Channel and TDC For A Pulsed Time-of-Flight Laser Rangefinder With Cm-Level Accuracyxiangyu gaoNoch keine Bewertungen
- Single Line Diagram 3 General Notes & Specification 1 Legend & Symbol 4Dokument1 SeiteSingle Line Diagram 3 General Notes & Specification 1 Legend & Symbol 4Abnar KumplishaNoch keine Bewertungen
- Solar Cell Losses and Design: Arno SmetsDokument17 SeitenSolar Cell Losses and Design: Arno SmetsGianmarco PeñaNoch keine Bewertungen
- VillamorDokument80 SeitenVillamorJeremiash ForondaNoch keine Bewertungen
- Kalyan K. Sen, Schauder, Corporation: Westinghouse ElectricDokument12 SeitenKalyan K. Sen, Schauder, Corporation: Westinghouse ElectrichuskeeNoch keine Bewertungen
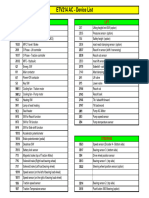
- ETV214 AC - Device List: Traction LiftDokument41 SeitenETV214 AC - Device List: Traction LiftKiều Văn TrungNoch keine Bewertungen
- Tritrix 16759Dokument5 SeitenTritrix 16759Ricky BaquirNoch keine Bewertungen
- An Overview of Aging Mechanisms and Diagnostics For Extruded Power CablesDokument6 SeitenAn Overview of Aging Mechanisms and Diagnostics For Extruded Power CableschethanNoch keine Bewertungen
- M/S Brand Matirx M/s Shaheen TradersDokument12 SeitenM/S Brand Matirx M/s Shaheen TradersJ IKhanNoch keine Bewertungen
- MCQsDokument7 SeitenMCQsमेनसन लाखेमरूNoch keine Bewertungen
- Submission+07+-+copyedited V2+Dokument13 SeitenSubmission+07+-+copyedited V2+Sơn Phạm ThanhNoch keine Bewertungen
- implementationDSPACEcontrol PDFDokument1 SeiteimplementationDSPACEcontrol PDFWissal AbidNoch keine Bewertungen
- EDC Fermi LevelDokument10 SeitenEDC Fermi LevelImran BashaNoch keine Bewertungen
- Lab Report: Bangladesh University of Business and Technology (BUBT)Dokument5 SeitenLab Report: Bangladesh University of Business and Technology (BUBT)23 - 017 - Md. Imran HossainNoch keine Bewertungen
- Wiw3362 W 503 PDFDokument1 SeiteWiw3362 W 503 PDFabathunNoch keine Bewertungen
- "GroomLake'Colonel'Reveals'All" MAGVID (Annotated)Dokument19 Seiten"GroomLake'Colonel'Reveals'All" MAGVID (Annotated)mathias455Noch keine Bewertungen
- KNX Planning Training: Time ScheduleDokument50 SeitenKNX Planning Training: Time ScheduleGeorge TrisinaNoch keine Bewertungen
- InTech-Study On Energy Efficiency of Induction Motor Soft Starting With Torque ControlDokument14 SeitenInTech-Study On Energy Efficiency of Induction Motor Soft Starting With Torque Controlmedeba_88Noch keine Bewertungen
- FLIR FC Series S Installation ManualDokument66 SeitenFLIR FC Series S Installation Manualreivin27Noch keine Bewertungen
- Literature ReviewDokument18 SeitenLiterature Reviewroyal1979Noch keine Bewertungen
- Ubd Unitplan Elecmag Ky 2016Dokument4 SeitenUbd Unitplan Elecmag Ky 2016api-281562636Noch keine Bewertungen
- Sanyo - SAP-CRV243GJH - SAP-KCRV243-303 Service ManualDokument78 SeitenSanyo - SAP-CRV243GJH - SAP-KCRV243-303 Service ManualRoberto BottiniNoch keine Bewertungen