Das könnte Ihnen auch gefallen
- Harry G. Brittain (Ed.) - Analytical Profiles of Drug Substances and Excipients, Vol. 28-Elsevier, Academic Press (2001) PDFDokument349 SeitenHarry G. Brittain (Ed.) - Analytical Profiles of Drug Substances and Excipients, Vol. 28-Elsevier, Academic Press (2001) PDFngochieu_909Noch keine Bewertungen
- Regulation 391ADokument6 SeitenRegulation 391Adnageshm4n244100% (1)
- Chapter 11Dokument46 SeitenChapter 11ninoska217608Noch keine Bewertungen
- Chapter 11Dokument61 SeitenChapter 11AimiKhanNoch keine Bewertungen
- Closed-Loop DynamicsDokument20 SeitenClosed-Loop Dynamicsjunhao_tan_1100% (1)
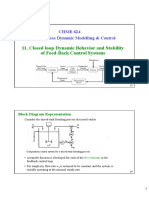
- Block Diagram Representation: Loop or A Closed-Loop SystemDokument63 SeitenBlock Diagram Representation: Loop or A Closed-Loop SystemaliNoch keine Bewertungen
- Chapter 11 - Closed Loop Control SystemsDokument22 SeitenChapter 11 - Closed Loop Control SystemsAdner RomeroNoch keine Bewertungen
- Chapter 10 - Stability of Closed-Loop Control SystemsDokument27 SeitenChapter 10 - Stability of Closed-Loop Control SystemsFakhrulShahrilEzanieNoch keine Bewertungen
- Chapter 9 - Dynamic Behavior of Closed Loop SystemsDokument45 SeitenChapter 9 - Dynamic Behavior of Closed Loop SystemsFakhrulShahrilEzanieNoch keine Bewertungen
- CHAPTER 11: Dynamic Behaviour & Stability of Closed-Loop Control SystemsDokument69 SeitenCHAPTER 11: Dynamic Behaviour & Stability of Closed-Loop Control Systemshakita86Noch keine Bewertungen
- Process Control: Version 2 EE IIT, Kharagpur 1Dokument13 SeitenProcess Control: Version 2 EE IIT, Kharagpur 1Malyaj SrivastavaNoch keine Bewertungen
- Ch11-Dynamic Behavior & Stability of Closed-Loop Control System.Dokument15 SeitenCh11-Dynamic Behavior & Stability of Closed-Loop Control System.Mark GoodmoreNoch keine Bewertungen
- Dynamic Behavior of Closed-Loop Control Systems: 10.1 Block Diagram RepresentationDokument26 SeitenDynamic Behavior of Closed-Loop Control Systems: 10.1 Block Diagram Representationratan_nitNoch keine Bewertungen
- Automation Exam Formula SheetDokument10 SeitenAutomation Exam Formula SheetRobert LoweNoch keine Bewertungen
- Closed Loop Control SystemDokument18 SeitenClosed Loop Control Systemkalyan mondalNoch keine Bewertungen
- TOPIC 4.0 The Dynamic Behavior of Feedback - Controlled ProcessesDokument7 SeitenTOPIC 4.0 The Dynamic Behavior of Feedback - Controlled ProcessesByron MawoyoNoch keine Bewertungen
- A Model-Based PI Controller Tuning and Design For Field Oriented Current Control of Permanent Magnet Synchronous MotorDokument7 SeitenA Model-Based PI Controller Tuning and Design For Field Oriented Current Control of Permanent Magnet Synchronous MotorRomaric AdamNoch keine Bewertungen
- Chapter 11 - Closed Loop Control SystemsDokument22 SeitenChapter 11 - Closed Loop Control SystemsAdner RomeroNoch keine Bewertungen
- Block DiagramDokument17 SeitenBlock DiagramSimran Jeet Singh MakenNoch keine Bewertungen
- Ei6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Dokument7 SeitenEi6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Anonymous yO7rcec6vuNoch keine Bewertungen
- Chapter 11 (11-23-04)Dokument61 SeitenChapter 11 (11-23-04)Rocker byNoch keine Bewertungen
- Closed Loop Dynamic Behavior and Stability of Feed-Back Control SystemsDokument21 SeitenClosed Loop Dynamic Behavior and Stability of Feed-Back Control Systemsali aljifriNoch keine Bewertungen
- CompensatorDokument69 SeitenCompensatorKarthika KandasamyNoch keine Bewertungen
- CHNG 3003 Assign4 2007Dokument9 SeitenCHNG 3003 Assign4 2007Nguyễn Tiến DũngNoch keine Bewertungen
- Lab RobotikaDokument15 SeitenLab RobotikaVivaldi KhathamiNoch keine Bewertungen
- Feedback Control PID Control: HadiyantoDokument64 SeitenFeedback Control PID Control: HadiyantoNuzul RamadhaniNoch keine Bewertungen
- Lcdbook Corrected PagesDokument4 SeitenLcdbook Corrected Pagessourcery22Noch keine Bewertungen
- New of Nonlinear: Class ControllersDokument7 SeitenNew of Nonlinear: Class Controllersanon_102072030Noch keine Bewertungen
- Week 4 Assignment 1 SolutionDokument10 SeitenWeek 4 Assignment 1 Solutionkirankuma.jagtapNoch keine Bewertungen
- Chapter 11 (11-23-04)Dokument61 SeitenChapter 11 (11-23-04)sruthimeena6891Noch keine Bewertungen
- Generation of Theoretical or Experimental Models of The Various Components of The SystemDokument17 SeitenGeneration of Theoretical or Experimental Models of The Various Components of The SystemCupa no DensetsuNoch keine Bewertungen
- L-12 (SS) (Ia&c) ( (Ee) Nptel) - P-I-D ControlDokument10 SeitenL-12 (SS) (Ia&c) ( (Ee) Nptel) - P-I-D ControlRaymond EsmeraldaNoch keine Bewertungen
- Colorado School of Mines CHEN403 Ziegler-Nichols Example: M Is The Amplitude Ratio. K M PDokument6 SeitenColorado School of Mines CHEN403 Ziegler-Nichols Example: M Is The Amplitude Ratio. K M Parpit gargNoch keine Bewertungen
- Homework 5 SolutionsDokument11 SeitenHomework 5 Solutionsnawinnawmu1026Noch keine Bewertungen
- 4 Microsoft Word - L-12 - SS - IA - C - EE - NPTELDokument10 Seiten4 Microsoft Word - L-12 - SS - IA - C - EE - NPTELRicky RawNoch keine Bewertungen
- LG Embedded Jan09Dokument5 SeitenLG Embedded Jan09Junaid AhmadNoch keine Bewertungen
- DCS 01 (Dcspeed)Dokument16 SeitenDCS 01 (Dcspeed)K PranavNoch keine Bewertungen
- Settling Time of OpampDokument7 SeitenSettling Time of OpampTumay KanarNoch keine Bewertungen
- Chapter8 3Dokument3 SeitenChapter8 3Chathuranga Swarna KumaraNoch keine Bewertungen
- Stability of Closed-Loop Control SystemsDokument19 SeitenStability of Closed-Loop Control SystemsThrishnaa BalasupurManiamNoch keine Bewertungen
- Chapter 4 Characteristics of Closed-Loop SystemsDokument25 SeitenChapter 4 Characteristics of Closed-Loop SystemsDio ChanNoch keine Bewertungen
- Control System Assignment - 2024Dokument2 SeitenControl System Assignment - 2024Sanjana NetamNoch keine Bewertungen
- Model Free Adaptive Predictive ControlDokument7 SeitenModel Free Adaptive Predictive Controldee1985Noch keine Bewertungen
- 2.0 What Are Penalty Factors?: P P P LDokument12 Seiten2.0 What Are Penalty Factors?: P P P LThiện VươngNoch keine Bewertungen
- Ic6501 Control Systems: UNIT-1 (2 Mark Q/A)Dokument6 SeitenIc6501 Control Systems: UNIT-1 (2 Mark Q/A)Anonymous yO7rcec6vuNoch keine Bewertungen
- IMCDokument15 SeitenIMCArioston JúniorNoch keine Bewertungen
- Control BoostDokument10 SeitenControl BoostNikunj AgarwalNoch keine Bewertungen
- Design of Fuzzy Sliding Mode Control For DC-DC ConverterDokument6 SeitenDesign of Fuzzy Sliding Mode Control For DC-DC ConverterXime Mendez FloresNoch keine Bewertungen
- Control System Design Based On Frequency Response Analysis: Closed-Loop BehaviorDokument53 SeitenControl System Design Based On Frequency Response Analysis: Closed-Loop Behaviorsatya sagarNoch keine Bewertungen
- EntropyDokument46 SeitenEntropyAnonymous UqsAfi100% (1)
- Lect 8 Dynamic Behaviour of Feedback Controller ProcessDokument12 SeitenLect 8 Dynamic Behaviour of Feedback Controller ProcessZaidoon MohsinNoch keine Bewertungen
- Traditional Advanced Control Approaches - Feedforward, Cascade and Selected ControlDokument42 SeitenTraditional Advanced Control Approaches - Feedforward, Cascade and Selected Controljricardo01976Noch keine Bewertungen
- Chapter 11 Chang.2Dokument39 SeitenChapter 11 Chang.2satya sagarNoch keine Bewertungen
- APC AssignmentDokument3 SeitenAPC AssignmentShivamNoch keine Bewertungen
- Closed-Loop Control of DC Drives With Controlled RectifierDokument40 SeitenClosed-Loop Control of DC Drives With Controlled Rectifierathan19490% (1)
- LPOPFDokument18 SeitenLPOPFWilliam MorettiNoch keine Bewertungen
- LQG LTR Controller Design For An Aircraft ModelDokument12 SeitenLQG LTR Controller Design For An Aircraft Modelantex nebyuNoch keine Bewertungen
- Calculus on Heisenberg Manifolds. (AM-119), Volume 119Von EverandCalculus on Heisenberg Manifolds. (AM-119), Volume 119Noch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGVon EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNoch keine Bewertungen
- Computational NeuroendocrinologyVon EverandComputational NeuroendocrinologyDuncan J. MacGregorNoch keine Bewertungen
- Control System Design Based On Frequency Response Analysis: Closed-Loop BehaviorDokument53 SeitenControl System Design Based On Frequency Response Analysis: Closed-Loop Behaviorsatya sagarNoch keine Bewertungen
- Controller Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID ControllersDokument66 SeitenController Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID Controllerssatya sagarNoch keine Bewertungen
- Chapter 11 Chang.2Dokument39 SeitenChapter 11 Chang.2satya sagarNoch keine Bewertungen
- Chapter 9 ChangDokument37 SeitenChapter 9 Changsatya sagarNoch keine Bewertungen
- PDC Chapter 8Dokument49 SeitenPDC Chapter 8satya sagarNoch keine Bewertungen
- Development of Empirical Dynamic Models From Step Response DataDokument23 SeitenDevelopment of Empirical Dynamic Models From Step Response Datasatya sagarNoch keine Bewertungen
- A Room-by-Room Guide For Ergonomic Lighting LevelsDokument4 SeitenA Room-by-Room Guide For Ergonomic Lighting LevelsshamsNoch keine Bewertungen
- Assignment 3 - POMDokument8 SeitenAssignment 3 - POMMcDhanesh JiNoch keine Bewertungen
- Y12 Chemistry Initial AssessmentDokument58 SeitenY12 Chemistry Initial AssessmentGeorge DrakeNoch keine Bewertungen
- Study of Reflex Klystron CharacteristicsDokument8 SeitenStudy of Reflex Klystron CharacteristicsakashNoch keine Bewertungen
- Projectile MotionDokument6 SeitenProjectile MotionArseniojakejr FloresNoch keine Bewertungen
- Nonlinear Modeling With OpenSeesDokument71 SeitenNonlinear Modeling With OpenSeesManu Vega100% (1)
- Ortho TRX LineDokument16 SeitenOrtho TRX LineAliOucharNoch keine Bewertungen
- Chemistry: Pearson EdexcelDokument28 SeitenChemistry: Pearson EdexcelNyraStardollNoch keine Bewertungen
- DMP4015SK3: P-Channel Enhancement Mode MosfetDokument7 SeitenDMP4015SK3: P-Channel Enhancement Mode MosfetpaulpuscasuNoch keine Bewertungen
- Diseño Cercha Metalica Tipo I VerificadoDokument36 SeitenDiseño Cercha Metalica Tipo I VerificadoJosé Mario Blacutt AléNoch keine Bewertungen
- School of Basic Sciences and Research, Sharda University Physics Laboratory ManualDokument5 SeitenSchool of Basic Sciences and Research, Sharda University Physics Laboratory ManualNiboli ZhimomiNoch keine Bewertungen
- Temperature Measuring Instrument (1-Channel) : Testo 925 - For Fast and Reliable Measurements in The HVAC FieldDokument8 SeitenTemperature Measuring Instrument (1-Channel) : Testo 925 - For Fast and Reliable Measurements in The HVAC FieldMirwansyah TanjungNoch keine Bewertungen
- ASCE7 SeismicProvisionsForNonStructuralComponents PDFDokument10 SeitenASCE7 SeismicProvisionsForNonStructuralComponents PDFsrikanth.iitkgpNoch keine Bewertungen
- Kcet Chemistry 2015Dokument11 SeitenKcet Chemistry 2015BURHAN0% (1)
- Product Specifications: CharacteristicsDokument5 SeitenProduct Specifications: CharacteristicsDaniel Herrera AstudilloNoch keine Bewertungen
- ACI 504 (R1997) Guide To Sealing Joints in Concrete StructuresDokument44 SeitenACI 504 (R1997) Guide To Sealing Joints in Concrete Structuresphilipyap100% (1)
- Drawing Numbering System: Client: ProjectDokument23 SeitenDrawing Numbering System: Client: ProjectPrasanna kumar subudhiNoch keine Bewertungen
- (Darryl D. Hol,) Geometric Mechanics Rotating, TR (B-Ok - CC) PDFDokument304 Seiten(Darryl D. Hol,) Geometric Mechanics Rotating, TR (B-Ok - CC) PDFOceanNoch keine Bewertungen
- Report 2018-En-1 en 13071-1-3 Aero EnglishDokument16 SeitenReport 2018-En-1 en 13071-1-3 Aero EnglishSlikCostaNoch keine Bewertungen
- 5STR 03T2040Dokument8 Seiten5STR 03T2040Vikas PatelNoch keine Bewertungen
- Math IMU CET Sample Questions 03Dokument14 SeitenMath IMU CET Sample Questions 03nh648rfhNoch keine Bewertungen
- MAX30101 High-Sensitivity Pulse Oximeter and Heart-Rate Sensor For Wearable HealthDokument35 SeitenMAX30101 High-Sensitivity Pulse Oximeter and Heart-Rate Sensor For Wearable HealthLeonardo NiñoNoch keine Bewertungen
- What Is Multivariable Calculus (MVC) ?Dokument6 SeitenWhat Is Multivariable Calculus (MVC) ?Muhammad ArshadNoch keine Bewertungen
- Lesson 13 Algebraic CurvesDokument21 SeitenLesson 13 Algebraic CurvesNiño Jhim AndrewNoch keine Bewertungen
- Digital Signal ProcessingDokument2 SeitenDigital Signal ProcessingAnonymous HyOfbJ60% (1)
- Modified Windkessel Model Applied in A Tubular Pulsation Dampener AnalysisDokument11 SeitenModified Windkessel Model Applied in A Tubular Pulsation Dampener AnalysisFrancesca CoattiNoch keine Bewertungen
- Digital Signal Processing: Instructor: Jen-Hui Chuang Instructor: Jen-Hui ChuangDokument31 SeitenDigital Signal Processing: Instructor: Jen-Hui Chuang Instructor: Jen-Hui ChuangRakesh InaniNoch keine Bewertungen