Das könnte Ihnen auch gefallen
- Finite Element Analysis 2marks With AnswersDokument22 SeitenFinite Element Analysis 2marks With AnswersAghil Buddy100% (1)
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsVon EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNoch keine Bewertungen
- Strain: Strength of MaterialsDokument5 SeitenStrain: Strength of MaterialsDon MatiasNoch keine Bewertungen
- ME6603 Finite Element AnalysisDokument21 SeitenME6603 Finite Element AnalysisPradeepNoch keine Bewertungen
- New Finite Element Analysis Lec1Dokument35 SeitenNew Finite Element Analysis Lec1BookMaggotNoch keine Bewertungen
- Numerical and Computer Methods in Structural MechanicsVon EverandNumerical and Computer Methods in Structural MechanicsSteven J. FenvesNoch keine Bewertungen
- Yield Line Analysis For SlabsDokument9 SeitenYield Line Analysis For Slabshghjjjk100% (1)
- An Introduction To The Finite Element Analysis: Presented by Niko ManopuloDokument47 SeitenAn Introduction To The Finite Element Analysis: Presented by Niko ManopuloShanmuga RamananNoch keine Bewertungen
- Nonlinear Analysis: Linear Response: P1/d1 P2/d2Dokument13 SeitenNonlinear Analysis: Linear Response: P1/d1 P2/d2LabinotMMorinaNoch keine Bewertungen
- Struct2 Lecture Notes #2 (Truss Analysis & Deflection) PDFDokument12 SeitenStruct2 Lecture Notes #2 (Truss Analysis & Deflection) PDFLowie Torres TonioNoch keine Bewertungen
- Chap 06 - Stresses in Beams (Advanced Topics)Dokument48 SeitenChap 06 - Stresses in Beams (Advanced Topics)Muhammad Fahim100% (1)
- Newton-Raphson MethodDokument32 SeitenNewton-Raphson MethodnafisbadranNoch keine Bewertungen
- Gaussian Quadrature in FEMDokument26 SeitenGaussian Quadrature in FEMKhaja Mohiuddin60% (5)
- Plastic Analysis Notes PDFDokument14 SeitenPlastic Analysis Notes PDFVineetha KrishnanNoch keine Bewertungen
- A Finite Element Method Primer For Mechanical Desing - Charles E. KnightDokument82 SeitenA Finite Element Method Primer For Mechanical Desing - Charles E. KnightRolffoTelloNoch keine Bewertungen
- Ept474 2dofDokument118 SeitenEpt474 2dofLeon OoNoch keine Bewertungen
- Direct Displacement MethodDokument5 SeitenDirect Displacement MethodTewodros AbateNoch keine Bewertungen
- Designing of Beam and ColumnDokument17 SeitenDesigning of Beam and ColumnRAHUL DasNoch keine Bewertungen
- Theory of Elasticity and PlasticityDokument12 SeitenTheory of Elasticity and PlasticityBharathi RajNoch keine Bewertungen
- Plastic AnalysisDokument51 SeitenPlastic AnalysisHafeel Ahamed Ashraf AliNoch keine Bewertungen
- Solution Methods For Eigenvalue Problems in Structural MechanicsDokument14 SeitenSolution Methods For Eigenvalue Problems in Structural MechanicsMelita ĆališNoch keine Bewertungen
- Mechanic of MaterialsDokument32 SeitenMechanic of MaterialsHussain RizviNoch keine Bewertungen
- Nonlinear FE Analysis 2009 1Dokument40 SeitenNonlinear FE Analysis 2009 1Venkata NarayanaNoch keine Bewertungen
- Failure TheoriesDokument107 SeitenFailure TheoriesJITENDRA MEENA100% (1)
- ST7201-Finite Element Analysis PDFDokument14 SeitenST7201-Finite Element Analysis PDFMadhan KumarNoch keine Bewertungen
- Computational Fluid Dynamics-Vol1Dokument500 SeitenComputational Fluid Dynamics-Vol1engma3Noch keine Bewertungen
- Navier StokesDokument36 SeitenNavier Stokesvincent02hk_57881301Noch keine Bewertungen
- 6002 Notes 07 L16Dokument27 Seiten6002 Notes 07 L16Mandar PatilNoch keine Bewertungen
- Slope Deflection MethodDokument34 SeitenSlope Deflection MethodAshok PradhanNoch keine Bewertungen
- Navier's Solution For Simply Supported Rectangular PlatesDokument26 SeitenNavier's Solution For Simply Supported Rectangular PlatesVIVEK KUMAR100% (1)
- Lecture 1Dokument69 SeitenLecture 1litrakhanNoch keine Bewertungen
- Comp Geo Mechanics Lecture NotesDokument629 SeitenComp Geo Mechanics Lecture NotesJorge Palomino100% (1)
- Finite Different Method - Heat Transfer - Using MatlabDokument27 SeitenFinite Different Method - Heat Transfer - Using MatlabLe Cong LapNoch keine Bewertungen
- Plastic AnalysisDokument37 SeitenPlastic AnalysisChan Keng ChunNoch keine Bewertungen
- Ceg461 - Tutorial 4b - ConsolidationDokument5 SeitenCeg461 - Tutorial 4b - ConsolidationdzikrydsNoch keine Bewertungen
- Plastic Analysis 1011Dokument129 SeitenPlastic Analysis 1011Omkar Bapat0% (1)
- Shear Force and Bending Moment Diagrams ZP 14 PDFDokument17 SeitenShear Force and Bending Moment Diagrams ZP 14 PDFZdenkoNoch keine Bewertungen
- Beer MaterialesDokument15 SeitenBeer MaterialesnannybobNoch keine Bewertungen
- ST5103-Theory of Elasticity and PlasticityDokument13 SeitenST5103-Theory of Elasticity and Plasticitycmurugan67% (3)
- Buckling of ColumnsDokument41 SeitenBuckling of Columnsassi_thaer100% (2)
- Strength of MaterialsDokument186 SeitenStrength of MaterialsprashmceNoch keine Bewertungen
- Bassam Afif Izzuddin 1990 PHD ThesisDokument316 SeitenBassam Afif Izzuddin 1990 PHD Thesisimran5705074Noch keine Bewertungen
- Chapter 04-Dynamic Response of Buildings PDFDokument64 SeitenChapter 04-Dynamic Response of Buildings PDFAngelique EsquillaNoch keine Bewertungen
- 9A01709 Advanced Structural AnalysisDokument8 Seiten9A01709 Advanced Structural AnalysisReddy Kiran KD0% (1)
- CIV 2213 - Fluid Mechanics II At-Home Test No. 1 Date & Start Time: Time AllowedDokument3 SeitenCIV 2213 - Fluid Mechanics II At-Home Test No. 1 Date & Start Time: Time Allowedshan singhNoch keine Bewertungen
- Solution MethodsDokument28 SeitenSolution MethodsAhmad HisyamNoch keine Bewertungen
- Structural Stability: Theory Implementation by Wai-Fah Chen: Read Online and Download EbookDokument10 SeitenStructural Stability: Theory Implementation by Wai-Fah Chen: Read Online and Download EbookAbuYasirHersiAwfaarahNoch keine Bewertungen
- FEM in Slope Stability AnalysisDokument28 SeitenFEM in Slope Stability AnalysisJorge Gamarra100% (1)
- Theory of Plates - NotesDokument47 SeitenTheory of Plates - Notessk1988jun100% (1)
- 09 - Theory of Elasticity and PlasticityDokument1 Seite09 - Theory of Elasticity and PlasticitykhajaimadNoch keine Bewertungen
- Mesh Convergence Study Using ANSYSDokument9 SeitenMesh Convergence Study Using ANSYSsmvarunmurthyNoch keine Bewertungen
- 9210 Brochure v1Dokument24 Seiten9210 Brochure v1akif222999Noch keine Bewertungen
- 1000 Solved Problems 228 256Dokument29 Seiten1000 Solved Problems 228 256Ali Hmoud AlhammashiNoch keine Bewertungen
- Types of FailureDokument11 SeitenTypes of FailureRavi PalaskarNoch keine Bewertungen
- Basics of Finite Element AnalysisDokument117 SeitenBasics of Finite Element AnalysispgkaeroNoch keine Bewertungen
- Arce504 FEM - ++++Dokument84 SeitenArce504 FEM - ++++Vijay KumarNoch keine Bewertungen
- Basu-Fem Notes Me623Dokument210 SeitenBasu-Fem Notes Me623Subhradeep ChatterjeeNoch keine Bewertungen
- An Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical SimulationDokument16 SeitenAn Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical Simulationaviraj2006Noch keine Bewertungen
- Module 1 Introduction To FEMDokument14 SeitenModule 1 Introduction To FEMKhaled AlzaabiNoch keine Bewertungen
- femUNIT - 2Dokument34 SeitenfemUNIT - 2संकेत कलगुटकरNoch keine Bewertungen
- Mechanical Testing of CompositesDokument11 SeitenMechanical Testing of CompositesjeovanNoch keine Bewertungen
- Soldering Iron Multifield Analysis Sample ModelDokument1 SeiteSoldering Iron Multifield Analysis Sample ModeljeovanNoch keine Bewertungen
- Fluid Elements With Branching Sample ModelDokument1 SeiteFluid Elements With Branching Sample ModeljeovanNoch keine Bewertungen
- Applied Sciences: Static and Seismic Responses of Eco-Friendly Buried Concrete Pipes With Various Dosages of Fly AshDokument32 SeitenApplied Sciences: Static and Seismic Responses of Eco-Friendly Buried Concrete Pipes With Various Dosages of Fly AshjeovanNoch keine Bewertungen
- Analysis of Thickness Distribution in Cup Produced by Rubber Pad FormingDokument9 SeitenAnalysis of Thickness Distribution in Cup Produced by Rubber Pad FormingjeovanNoch keine Bewertungen
- Power Max 6000Dokument28 SeitenPower Max 6000jeovanNoch keine Bewertungen
- Bedienung Speedrocker Set En-1Dokument2 SeitenBedienung Speedrocker Set En-1jeovanNoch keine Bewertungen
- 8989 Ijmme IjensDokument16 Seiten8989 Ijmme IjensjeovanNoch keine Bewertungen
- Optimization of The Geometrical Parameters of Bonded Composite Wrap For Repairing Cracked PipelinesDokument12 SeitenOptimization of The Geometrical Parameters of Bonded Composite Wrap For Repairing Cracked PipelinesjeovanNoch keine Bewertungen
- A Pseudo-Elastic Model For The Mullins Effect in Filled RubberDokument18 SeitenA Pseudo-Elastic Model For The Mullins Effect in Filled RubberjeovanNoch keine Bewertungen
- ES 128: Computer Assignment #5 Due in Class On Monday, 26 April 2010Dokument3 SeitenES 128: Computer Assignment #5 Due in Class On Monday, 26 April 2010jeovanNoch keine Bewertungen
- No 1Dokument10 SeitenNo 1jeovanNoch keine Bewertungen
- Z-Core: System: Pressure Range: Temperature: Chemical BarrierDokument16 SeitenZ-Core: System: Pressure Range: Temperature: Chemical BarrierjeovanNoch keine Bewertungen
- 8989 Ijmme IjensDokument16 Seiten8989 Ijmme IjensjeovanNoch keine Bewertungen
- Does The Flipped Classroom Improve Student Learning and Satisfaction? A Systematic Review and Meta-AnalysisDokument17 SeitenDoes The Flipped Classroom Improve Student Learning and Satisfaction? A Systematic Review and Meta-AnalysisjeovanNoch keine Bewertungen
- CEM II, Standardsement FA (CEM II/B-M) : Environmental Product DeclarationDokument7 SeitenCEM II, Standardsement FA (CEM II/B-M) : Environmental Product DeclarationjeovanNoch keine Bewertungen
- Full Directory 2015Dokument188 SeitenFull Directory 2015jeovanNoch keine Bewertungen
- ES 128: Computer Assignment #1 Due in Class On Monday, 22 Feb 2010Dokument3 SeitenES 128: Computer Assignment #1 Due in Class On Monday, 22 Feb 2010jeovanNoch keine Bewertungen
- Onshore LNG Storage: Non-Linear Analysis of Concrete Outer Tank StructuresDokument2 SeitenOnshore LNG Storage: Non-Linear Analysis of Concrete Outer Tank StructuresjeovanNoch keine Bewertungen
- FEM UnitsDokument1 SeiteFEM UnitsjeovanNoch keine Bewertungen
- Concrete Tower SilosDokument6 SeitenConcrete Tower SilosjeovanNoch keine Bewertungen
- Using Revit To FEM-Design 1.2Dokument18 SeitenUsing Revit To FEM-Design 1.2jeovanNoch keine Bewertungen
- 08 - Foredrag Island September 2014Dokument34 Seiten08 - Foredrag Island September 2014jeovanNoch keine Bewertungen
- Design / Construction Problems in The Arctic: NunavutDokument21 SeitenDesign / Construction Problems in The Arctic: NunavutjeovanNoch keine Bewertungen
- Chapter 12 Functions PDFDokument2 SeitenChapter 12 Functions PDFGeorge Choo100% (1)
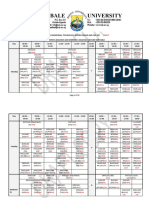
- Fetadfa Lecture Time Table Semester I 2023 - 24 and Semester II 2022 - 23 DraftDokument12 SeitenFetadfa Lecture Time Table Semester I 2023 - 24 and Semester II 2022 - 23 Draftamosainamani6Noch keine Bewertungen
- AbstractDokument2 SeitenAbstractAnonymous zHmefGH30YNoch keine Bewertungen
- GR 10 Test March 2021 MemoDokument4 SeitenGR 10 Test March 2021 MemoPoky MngqibisaNoch keine Bewertungen
- Counting Surfaces - B. EynardDokument427 SeitenCounting Surfaces - B. EynardFernanda Florido100% (1)
- Voltage StabilityDokument5 SeitenVoltage StabilityWisnu FajriNoch keine Bewertungen
- Distribution and Network ModelsDokument8 SeitenDistribution and Network ModelsElaine EscobanezNoch keine Bewertungen
- Ultimate Strength AnalysisDokument3 SeitenUltimate Strength AnalysisChristian Gadicho QuintanaNoch keine Bewertungen
- Math 9C Final Practice 3 With SolutionsDokument3 SeitenMath 9C Final Practice 3 With SolutionsArthy SangarNoch keine Bewertungen
- 7.5 Complex Fractions PDFDokument7 Seiten7.5 Complex Fractions PDFLaiza Niña Gimenez LariegoNoch keine Bewertungen
- Identidades Trigonometricas: David Mamani GuayguaDokument4 SeitenIdentidades Trigonometricas: David Mamani GuayguaRONALDO YUPANQUI SALINASNoch keine Bewertungen
- Bmo2 2009Dokument1 SeiteBmo2 2009janardanNoch keine Bewertungen
- Comparison Tests: Series Examples - Part IIDokument12 SeitenComparison Tests: Series Examples - Part IIkamlesh agrahariNoch keine Bewertungen
- TrigonometryDokument34 SeitenTrigonometryharshNoch keine Bewertungen
- DESMOS Graphing AssignmentDokument17 SeitenDESMOS Graphing AssignmentAnonymous 7GjdlMDoGNoch keine Bewertungen
- Correspondence Course For Iit-JeeDokument9 SeitenCorrespondence Course For Iit-JeeApex InstituteNoch keine Bewertungen
- Signal Theory and ApplicationDokument16 SeitenSignal Theory and ApplicationricetNoch keine Bewertungen
- Akash Maths Project 2Dokument6 SeitenAkash Maths Project 2Soham DasNoch keine Bewertungen
- An Innovative Exact Method For Solving Fully Interval Integer Transportation ProblemsDokument13 SeitenAn Innovative Exact Method For Solving Fully Interval Integer Transportation ProblemsAnggersetiyaajiNoch keine Bewertungen
- ITF-DPP#01 Mains PDFDokument3 SeitenITF-DPP#01 Mains PDFAkshit MaheshwariNoch keine Bewertungen
- Complex VMC PDFDokument50 SeitenComplex VMC PDFIron ManNoch keine Bewertungen
- PTSP 2 Marks Questions Unit IDokument2 SeitenPTSP 2 Marks Questions Unit IramanaNoch keine Bewertungen
- Conic SectionsDokument8 SeitenConic SectionsZachary BlakewellNoch keine Bewertungen
- Exercises To "Applied Functional Analysis"Dokument13 SeitenExercises To "Applied Functional Analysis"peterNoch keine Bewertungen
- Dwnload Full Applied Calculus 7th Edition Berresford Solutions Manual PDFDokument35 SeitenDwnload Full Applied Calculus 7th Edition Berresford Solutions Manual PDFabandontidde.obwdax100% (16)
- Lecture 1 - Complex Numbers 1 The Field of Complex Numbers: 1.1 Arithmetic OperationsDokument6 SeitenLecture 1 - Complex Numbers 1 The Field of Complex Numbers: 1.1 Arithmetic OperationsManeeshNoch keine Bewertungen
- Chap7 - F2-A - 2 - Notes DiffDokument35 SeitenChap7 - F2-A - 2 - Notes DiffMuhammad Aminnur Hasmin B. HasminNoch keine Bewertungen
- 6e Liesmycomp Stu PDFDokument9 Seiten6e Liesmycomp Stu PDFluizmenezes2010Noch keine Bewertungen
- On The Stress Integration in Large Strain Elasto-Plasticity: Francisco J. Montáns, Klaus-Jürgen BatheDokument4 SeitenOn The Stress Integration in Large Strain Elasto-Plasticity: Francisco J. Montáns, Klaus-Jürgen BathecyrusnasiraiNoch keine Bewertungen
- Homework 8 ProblemsDokument2 SeitenHomework 8 ProblemsmlunguNoch keine Bewertungen