Das könnte Ihnen auch gefallen
- Pmic Safety Detroit TechdayDokument61 SeitenPmic Safety Detroit Techdays.b.v.seshagiri1407Noch keine Bewertungen
- Automotive Microelectronics - 2001 PDFDokument93 SeitenAutomotive Microelectronics - 2001 PDFjovopavlovic100% (3)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusVon EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNoch keine Bewertungen
- 108 PDFDokument28 Seiten108 PDFcoulibalyoumarNoch keine Bewertungen
- Analog ElectronicsDokument254 SeitenAnalog ElectronicsNithindev GuttikondaNoch keine Bewertungen
- TIS & Parking GuidelinesDokument81 SeitenTIS & Parking GuidelinesNanda Kumar100% (2)
- WestJet Charles ProjectDokument27 SeitenWestJet Charles Projectinderdhindsa100% (2)
- Introduction Into Automotive Electronics DesignDokument39 SeitenIntroduction Into Automotive Electronics DesignGIUSEPPE100% (1)
- Level of ServiceDokument137 SeitenLevel of ServiceSyira Shuhimi0% (2)
- Low-Current Systems Engineer’S Technical Handbook: A Guide to Design and SupervisionVon EverandLow-Current Systems Engineer’S Technical Handbook: A Guide to Design and SupervisionBewertung: 5 von 5 Sternen5/5 (1)
- AURIX MultiCore Lauterbach HandoutDokument56 SeitenAURIX MultiCore Lauterbach Handouts.b.v.seshagiri1407Noch keine Bewertungen
- Oracle® Financials Interview Questions: Unofficial Oracle Financials Certification ReviewVon EverandOracle® Financials Interview Questions: Unofficial Oracle Financials Certification ReviewBewertung: 2.5 von 5 Sternen2.5/5 (6)
- BFH Book 2 5.0.3Dokument116 SeitenBFH Book 2 5.0.3Benjamin StrawNoch keine Bewertungen
- Foundation Course for Advanced Computer StudiesVon EverandFoundation Course for Advanced Computer StudiesNoch keine Bewertungen
- GD RV Rental Contract BlankDokument4 SeitenGD RV Rental Contract BlankTawny FernandezNoch keine Bewertungen
- BFGoodrich Truck Tires Data BookDokument20 SeitenBFGoodrich Truck Tires Data Bookluis eduardo corzo enriquezNoch keine Bewertungen
- MBS Group Workshops Proposal PDFDokument110 SeitenMBS Group Workshops Proposal PDFSwayamjeet Das100% (1)
- MAENAD ASIL Decomposition 2011Dokument18 SeitenMAENAD ASIL Decomposition 2011s.b.v.seshagiri1407Noch keine Bewertungen
- Do Not Be Afraid of UVMDokument42 SeitenDo Not Be Afraid of UVMAkshay BishtNoch keine Bewertungen
- Civil Engineering - RailwaysDokument24 SeitenCivil Engineering - RailwaysWojciech Czerwiński60% (5)
- Rule 10 RA 9514 Classification of OccupancyDokument24 SeitenRule 10 RA 9514 Classification of OccupancyMelanie67% (3)
- Simulink-Based Codesign and CosimulationDokument31 SeitenSimulink-Based Codesign and CosimulationTatiano BrolloNoch keine Bewertungen
- Lecture 1 - Introduction Embedded SystemsDokument47 SeitenLecture 1 - Introduction Embedded SystemsjohnNoch keine Bewertungen
- Lecture 5 Substation Automation SystemsDokument20 SeitenLecture 5 Substation Automation Systemsemy1188Noch keine Bewertungen
- ATR Air SystemsDokument59 SeitenATR Air SystemsJavierNoch keine Bewertungen
- HIL Automotive EngineeringDokument16 SeitenHIL Automotive EngineeringMinh NguyenNoch keine Bewertungen
- Yard FacilitiesDokument30 SeitenYard FacilitiesYgandranNoch keine Bewertungen
- Substation Automation Systems PDFDokument47 SeitenSubstation Automation Systems PDFAlly RaxaNoch keine Bewertungen
- Embedded System in Automobile VehiclesDokument17 SeitenEmbedded System in Automobile Vehiclessam clastineNoch keine Bewertungen
- Introduction Design of MechatronicsDokument45 SeitenIntroduction Design of MechatronicsMuthu Sankar Dhoni100% (1)
- EC8791-Embedded and Real Time Systems UNITS NOTESDokument435 SeitenEC8791-Embedded and Real Time Systems UNITS NOTES036 PRANEETHA S SNoch keine Bewertungen
- Engineering Standards: EN 50121-2 (CENELEC)Dokument2 SeitenEngineering Standards: EN 50121-2 (CENELEC)Deepak Gehlot100% (1)
- Programmable Logic ControllersDokument18 SeitenProgrammable Logic Controllerstt_aljobory3911Noch keine Bewertungen
- Programmable Logic ControllersDokument18 SeitenProgrammable Logic ControllerssujithNoch keine Bewertungen
- Omotive SystemDokument22 SeitenOmotive SystemPooja100% (1)
- Embedded Controls Intro W09Dokument46 SeitenEmbedded Controls Intro W09Saqib AkhtarNoch keine Bewertungen
- Embedded Controls IntroDokument25 SeitenEmbedded Controls IntroEgy SangajiNoch keine Bewertungen
- Embedded Systems Design 1Dokument50 SeitenEmbedded Systems Design 1Asante WilliamNoch keine Bewertungen
- EEDG/CE 6301: Advanced Digital Logic: Mehrdad NouraniDokument44 SeitenEEDG/CE 6301: Advanced Digital Logic: Mehrdad NouraniGowtham HariNoch keine Bewertungen
- Ec8791 LNDokument418 SeitenEc8791 LNGanapathi RamNoch keine Bewertungen
- Lecture 5 Substation Automation SystemsDokument20 SeitenLecture 5 Substation Automation Systemscingoski123Noch keine Bewertungen
- ElectricMachines4 MotorDesign DS MPDokument47 SeitenElectricMachines4 MotorDesign DS MPLatisha CarterNoch keine Bewertungen
- What's An Embedded System?Dokument21 SeitenWhat's An Embedded System?Minh HoangNoch keine Bewertungen
- Automatic Room Light ControllerDokument41 SeitenAutomatic Room Light Controllervipul22150% (2)
- AutotronikaDokument106 SeitenAutotronikazaidiazir100% (1)
- IC Microcontroller Presentation 16 17 OKDokument36 SeitenIC Microcontroller Presentation 16 17 OKChaichana Tosuwancharoen100% (1)
- SDforRTS L Module Outline A Brief Intro. To RTSDokument21 SeitenSDforRTS L Module Outline A Brief Intro. To RTSSpring PrintsNoch keine Bewertungen
- SENG 440 Slides Lesson 01Dokument21 SeitenSENG 440 Slides Lesson 01mrgoboomNoch keine Bewertungen
- Mcse Jos Onokiewicz Jos - Onokiewicz@han - NL November 2011Dokument45 SeitenMcse Jos Onokiewicz Jos - Onokiewicz@han - NL November 2011Eyob AmraNoch keine Bewertungen
- 1244 200 Set1SimulationModellingDokument15 Seiten1244 200 Set1SimulationModellingahmedabeshaNoch keine Bewertungen
- CLASS 1-Complex Systems and Micro ProcessorsDokument21 SeitenCLASS 1-Complex Systems and Micro ProcessorsSivakumar KNoch keine Bewertungen
- Simulation in Design at TRW: John Stenbit January 9, 2001Dokument7 SeitenSimulation in Design at TRW: John Stenbit January 9, 2001incosewmaNoch keine Bewertungen
- PLC1 ADokument71 SeitenPLC1 ASymon Justine SañoNoch keine Bewertungen
- Chip Simulation of Automotive Ecus: Jakob Mauss, Matthias SimonsDokument9 SeitenChip Simulation of Automotive Ecus: Jakob Mauss, Matthias SimonsAinis ŠtelemėkasNoch keine Bewertungen
- ° Pls Read Pro Forma: Course ObjectiveDokument26 Seiten° Pls Read Pro Forma: Course ObjectiveKC KoayNoch keine Bewertungen
- Iscug 2013 Hls TutorialDokument96 SeitenIscug 2013 Hls TutorialLiu WenNoch keine Bewertungen
- LEC 06 - 07 Mechatronics Systems and ApplicationsDokument26 SeitenLEC 06 - 07 Mechatronics Systems and ApplicationsAakash ParmarNoch keine Bewertungen
- Lectric Mobility: Track OverviewDokument5 SeitenLectric Mobility: Track Overviewabdo zainNoch keine Bewertungen
- Magic Chrono Vehicle Track SupportDokument30 SeitenMagic Chrono Vehicle Track SupportFazry NurokhmanNoch keine Bewertungen
- 1.vehicle OverviewDokument34 Seiten1.vehicle OverviewShashikumar ChanchiNoch keine Bewertungen
- PLC and Collaborative AutomationDokument4 SeitenPLC and Collaborative AutomationChristopherElPadrinoCardenasNoch keine Bewertungen
- Computer Architecture and Embedded SystemDokument67 SeitenComputer Architecture and Embedded SystemKetan JadavNoch keine Bewertungen
- MEBD Embedded Systems Scheme With Syllabus - 2011Dokument40 SeitenMEBD Embedded Systems Scheme With Syllabus - 2011imbharteshNoch keine Bewertungen
- Submitted By:-MOHD ANASDokument33 SeitenSubmitted By:-MOHD ANASEr Anas Nazar TurkNoch keine Bewertungen
- Rajib Mall Chapters 1,2,3Dokument343 SeitenRajib Mall Chapters 1,2,3darkclaw786100% (4)
- What Is An Embedded System?: Special CharacteristicsDokument3 SeitenWhat Is An Embedded System?: Special Characteristicsrostamedastan65Noch keine Bewertungen
- Seminar On Logic Gates SimulatorDokument27 SeitenSeminar On Logic Gates SimulatorAmrita05270% (1)
- Presentation 1Dokument34 SeitenPresentation 1varunNoch keine Bewertungen
- Programmable Logic ControllerDokument9 SeitenProgrammable Logic ControllerSarath KumarNoch keine Bewertungen
- Satish-Ppt 1Dokument19 SeitenSatish-Ppt 1video viralNoch keine Bewertungen
- CE and SONDokument37 SeitenCE and SONTarek Abubakr AbdulazizNoch keine Bewertungen
- Mech Car Parking Systems Project ReportDokument24 SeitenMech Car Parking Systems Project Reportsubhrajit kumar sethiNoch keine Bewertungen
- Embedded SystemsDokument17 SeitenEmbedded SystemsSadia JannatNoch keine Bewertungen
- Gowda2019 ECU Inter - Processor Data CommunicationDokument11 SeitenGowda2019 ECU Inter - Processor Data Communications.b.v.seshagiri1407Noch keine Bewertungen
- George2016 Writing Good Techincal Safety RequirementsDokument9 SeitenGeorge2016 Writing Good Techincal Safety Requirementss.b.v.seshagiri14070% (1)
- ZD 007 Sample Definition Project Management ENDokument1 SeiteZD 007 Sample Definition Project Management ENs.b.v.seshagiri1407Noch keine Bewertungen
- QEP en Quality Requirements For SamplesDokument3 SeitenQEP en Quality Requirements For Sampless.b.v.seshagiri1407Noch keine Bewertungen
- Gowda2019 ECU Inter - Processor Data CommunicationDokument11 SeitenGowda2019 ECU Inter - Processor Data Communications.b.v.seshagiri1407Noch keine Bewertungen
- ICCE Presentation On VESA Display PortDokument40 SeitenICCE Presentation On VESA Display Porthithot2008Noch keine Bewertungen
- H Da Barth Functional Safety On MulticoreDokument23 SeitenH Da Barth Functional Safety On Multicores.b.v.seshagiri1407Noch keine Bewertungen
- Reliability and Failure Analysis of Electronic Components: by Dr. Charles Surya, ENC CD 636, ×6220 Ensurya@polyu - Edu.hkDokument61 SeitenReliability and Failure Analysis of Electronic Components: by Dr. Charles Surya, ENC CD 636, ×6220 Ensurya@polyu - Edu.hkhariprasad_pentiNoch keine Bewertungen
- Slyt 581Dokument5 SeitenSlyt 581ajoaomvNoch keine Bewertungen
- Adc Student: Andrew Brown Jonathan Warner Laura StricklandDokument51 SeitenAdc Student: Andrew Brown Jonathan Warner Laura Stricklands.b.v.seshagiri1407Noch keine Bewertungen
- 320 Lecture 3Dokument10 Seiten320 Lecture 3s.b.v.seshagiri1407Noch keine Bewertungen
- P11Dokument22 SeitenP11s.b.v.seshagiri1407Noch keine Bewertungen
- Analytical Study of Sense AmplifierDokument5 SeitenAnalytical Study of Sense Amplifiers.b.v.seshagiri1407Noch keine Bewertungen
- Elec Chap 3Dokument28 SeitenElec Chap 3Giezel RevisNoch keine Bewertungen
- S2P5 Gyu Myoung LeeDokument20 SeitenS2P5 Gyu Myoung Lees.b.v.seshagiri1407Noch keine Bewertungen
- Elec Chap 3Dokument28 SeitenElec Chap 3Giezel RevisNoch keine Bewertungen
- Lecture10 MOS Transistor Circuit AnalysisDokument22 SeitenLecture10 MOS Transistor Circuit AnalysisKartika MunirNoch keine Bewertungen
- Sensors Used in Power Sources For IoEDokument33 SeitenSensors Used in Power Sources For IoEKiran KirruNoch keine Bewertungen
- L17 FET DC AnalysisDokument19 SeitenL17 FET DC Analysiss.b.v.seshagiri1407Noch keine Bewertungen
- LFI 2015 - DL Lunch Learn SlidesDokument61 SeitenLFI 2015 - DL Lunch Learn Slidess.b.v.seshagiri1407Noch keine Bewertungen
- Automotive Mosfets in Linear Applications: Thermal InstabilityDokument6 SeitenAutomotive Mosfets in Linear Applications: Thermal Instabilitys.b.v.seshagiri1407Noch keine Bewertungen
- FET Current-Mirror Examples Common-Source Amplifier: 1 2 3 REF 3 2 2 3 2 REFDokument5 SeitenFET Current-Mirror Examples Common-Source Amplifier: 1 2 3 REF 3 2 2 3 2 REFManpreet SinghNoch keine Bewertungen
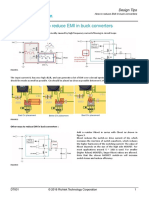
- EMI Design TipsDokument3 SeitenEMI Design Tipss.b.v.seshagiri1407Noch keine Bewertungen
- 07 DRITSANOS IoT-Conference Schneider-ElectricDokument13 Seiten07 DRITSANOS IoT-Conference Schneider-Electrics.b.v.seshagiri1407Noch keine Bewertungen
- AppNote - ProfetOperatingModes - V1 0 - 07-2011 PDFDokument16 SeitenAppNote - ProfetOperatingModes - V1 0 - 07-2011 PDFs.b.v.seshagiri1407100% (1)
- Lect 22 MOSFET Current Mirror and CS Amplifier PDFDokument10 SeitenLect 22 MOSFET Current Mirror and CS Amplifier PDFs.b.v.seshagiri1407Noch keine Bewertungen
- Single Axle 4: Esal EsalDokument4 SeitenSingle Axle 4: Esal Esalmaurice baptista guammeNoch keine Bewertungen
- F02 Earthworks 02Dokument8 SeitenF02 Earthworks 02BryanHarold BrooNoch keine Bewertungen
- 150 5370 10H PDFDokument727 Seiten150 5370 10H PDFRen G'meszaNoch keine Bewertungen
- Bangalore BMTC Bus RoutesDokument6 SeitenBangalore BMTC Bus RoutesChanderNoch keine Bewertungen
- MEM341 Chapter 1 NotaDokument6 SeitenMEM341 Chapter 1 NotaIomanip IncludeNoch keine Bewertungen
- Sacred Heart of Jesus Church, Madanthyar - Kalzache Zaith Monthi Fest IssueDokument120 SeitenSacred Heart of Jesus Church, Madanthyar - Kalzache Zaith Monthi Fest IssuemadanthyarchurchNoch keine Bewertungen
- Maintenance Manual Fontaine Fifth Wheel Maintenance: SAE Standard King PinDokument2 SeitenMaintenance Manual Fontaine Fifth Wheel Maintenance: SAE Standard King PinedilsonNoch keine Bewertungen
- EWS Whistler 2017 Course DetailsDokument2 SeitenEWS Whistler 2017 Course DetailsMattNoch keine Bewertungen
- Enroute Chart-Icao - Upper Airspace: 07 NOV 2019 ENR 6-1 Romania AIPDokument1 SeiteEnroute Chart-Icao - Upper Airspace: 07 NOV 2019 ENR 6-1 Romania AIPCatalin CiocarlanNoch keine Bewertungen
- Gurucharitra AvatarnikaDokument8 SeitenGurucharitra AvatarnikaMilind JoshiNoch keine Bewertungen
- CET Power - AGIL Tri-Tri Datasheet v2.5Dokument2 SeitenCET Power - AGIL Tri-Tri Datasheet v2.5jokotsNoch keine Bewertungen
- 2007 Full SpecbookDokument1.080 Seiten2007 Full SpecbookGuillermo LuchinNoch keine Bewertungen
- JCB 160W T2 электросхема описаниеDokument1 SeiteJCB 160W T2 электросхема описаниебекиров эрнестNoch keine Bewertungen
- Adaptive Priority Based Scheduling Algorithm For Intelligent Traffic Control in Urban Cities Using Multi Agent SystemDokument14 SeitenAdaptive Priority Based Scheduling Algorithm For Intelligent Traffic Control in Urban Cities Using Multi Agent Systemion cioriciNoch keine Bewertungen
- ATD ReportDokument17 SeitenATD ReportNikhil VajramattiNoch keine Bewertungen
- Coast Artillery Journal - Feb 1923Dokument97 SeitenCoast Artillery Journal - Feb 1923CAP History LibraryNoch keine Bewertungen
- 14 01 16 GCS SG Rev03Dokument189 Seiten14 01 16 GCS SG Rev03Александър ПухлевNoch keine Bewertungen
- College of Education: Columban College Inc. Olongapo City Research LocaleDokument7 SeitenCollege of Education: Columban College Inc. Olongapo City Research LocaleMary Christine IgnacioNoch keine Bewertungen
- Annual Report of Air India Express LimitedDokument122 SeitenAnnual Report of Air India Express LimitedVrinda P SunilNoch keine Bewertungen