Das könnte Ihnen auch gefallen
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Von EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Noch keine Bewertungen
- Coprocessor AlteredDokument42 SeitenCoprocessor Alteredchandanayadav8490Noch keine Bewertungen
- 8087 CoprocessorDokument44 Seiten8087 CoprocessormridulkhandelwalNoch keine Bewertungen
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationVon EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNoch keine Bewertungen
- 8087 Numerical Data ProcessorDokument42 Seiten8087 Numerical Data ProcessorNayeem Hossain FaruqueNoch keine Bewertungen
- Architecture and interfacing of 8087 math coprocessorDokument22 SeitenArchitecture and interfacing of 8087 math coprocessorAbhishek SinghNoch keine Bewertungen
- Cse2006 - Microprocessor & InterfacingDokument53 SeitenCse2006 - Microprocessor & InterfacingPREETI SAI THANDAVAN 20BCE1740Noch keine Bewertungen
- Advanced 8086 Microprocessor Trainer: Learning MaterialDokument80 SeitenAdvanced 8086 Microprocessor Trainer: Learning Materialk.jp914733Noch keine Bewertungen
- Manual M 86-01Dokument79 SeitenManual M 86-01Abvolt IndiaNoch keine Bewertungen
- 8282,8286,8284Dokument23 Seiten8282,8286,8284Relan Soniia100% (1)
- CoprocessorDokument23 SeitenCoprocessorsarthakNoch keine Bewertungen
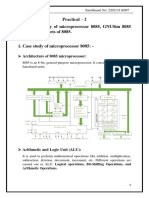
- Micro Processors: Case Study SummaryDokument6 SeitenMicro Processors: Case Study SummaryNagesh NaiduNoch keine Bewertungen
- Microprocessor Manual NewDokument26 SeitenMicroprocessor Manual NewVirendra KumarNoch keine Bewertungen
- Microprocessor 8086 AssigenmentDokument14 SeitenMicroprocessor 8086 AssigenmentMuneebNoch keine Bewertungen
- Research Paper On 8086 MicroprocessorDokument7 SeitenResearch Paper On 8086 Microprocessorfzqs7g1d100% (1)
- 8284A Clock Generator ExplainedDokument4 Seiten8284A Clock Generator ExplainedJayashreedas1990Noch keine Bewertungen
- 8259 ADokument16 Seiten8259 Aapi-26113146100% (1)
- Unit-I (8086) : Microprocessor and MicrocontrollersDokument22 SeitenUnit-I (8086) : Microprocessor and MicrocontrollerskesavantNoch keine Bewertungen
- MIC Chap 1 NotesDokument15 SeitenMIC Chap 1 NotesSonali AhireNoch keine Bewertungen
- Unit 2 16 Bit Microprocessors 8086/8088Dokument33 SeitenUnit 2 16 Bit Microprocessors 8086/8088Asha GusainNoch keine Bewertungen
- 8088Dokument12 Seiten8088MuhammadAli VellaniNoch keine Bewertungen
- Zilog Z-80 Product SpecificationsDokument10 SeitenZilog Z-80 Product SpecificationsTheAnonymousLugiaNoch keine Bewertungen
- Unit 2Dokument55 SeitenUnit 2Shubhankit SinghNoch keine Bewertungen
- 8087 Numeric Data ProcessorDokument5 Seiten8087 Numeric Data Processornithya GNoch keine Bewertungen
- Question Bank For MPDokument38 SeitenQuestion Bank For MPmekalajesiNoch keine Bewertungen
- 8087 - Math CoprocessorDokument68 Seiten8087 - Math CoprocessorLohith B M BandiNoch keine Bewertungen
- The Intel 8087 Math CoProcessorDokument22 SeitenThe Intel 8087 Math CoProcessorLuis HerreraNoch keine Bewertungen
- 8087 Numeric Data ProcessorDokument13 Seiten8087 Numeric Data ProcessorElanor ElNoch keine Bewertungen
- Microprocessor Manual NewDokument26 SeitenMicroprocessor Manual NewVarun AgarwalNoch keine Bewertungen
- 8085 Microprocessor Trainer GuideDokument73 Seiten8085 Microprocessor Trainer GuideKuldeep Saini0% (1)
- Lab 1+2 Timer and StopwatchDokument14 SeitenLab 1+2 Timer and StopwatchMuhd Ikram ShabryNoch keine Bewertungen
- Pin Diagram 0f 8086 Microprocessor or The Hardware Model of 8086Dokument21 SeitenPin Diagram 0f 8086 Microprocessor or The Hardware Model of 8086Abay YeshawNoch keine Bewertungen
- Lecture 3 Features of 16-Bit Microprocessor 8086Dokument35 SeitenLecture 3 Features of 16-Bit Microprocessor 8086Brightone NyandoroNoch keine Bewertungen
- Lecture 3Dokument24 SeitenLecture 3MK Milly100% (1)
- Module 2 - Lecture 8Dokument24 SeitenModule 2 - Lecture 8AQeNoch keine Bewertungen
- 8085 Features, Signal DescriptionDokument13 Seiten8085 Features, Signal DescriptionRakesh Kumar DNoch keine Bewertungen
- MP Lab Manual FinalDokument72 SeitenMP Lab Manual FinalRavindra KumarNoch keine Bewertungen
- QB Module8Dokument9 SeitenQB Module8Vibhor MittalNoch keine Bewertungen
- Intel: 8259A Programmable Interrupt Controller (8259A/8259A-2)Dokument26 SeitenIntel: 8259A Programmable Interrupt Controller (8259A/8259A-2)Thành Phố BuồnNoch keine Bewertungen
- 1-Architecture of 8085Dokument34 Seiten1-Architecture of 8085Pinki KumariNoch keine Bewertungen
- IN and OUT instructions in the 8086 microprocessor: input and output operationsDokument10 SeitenIN and OUT instructions in the 8086 microprocessor: input and output operationsdtselvanNoch keine Bewertungen
- Microprocessor Lab Manual - FinalDokument47 SeitenMicroprocessor Lab Manual - FinalPatel manav PatelNoch keine Bewertungen
- Microprocessor and Its ApplicationsDokument25 SeitenMicroprocessor and Its ApplicationsAbhishek SinghNoch keine Bewertungen
- 80286Dokument74 Seiten80286Arannya MonzurNoch keine Bewertungen
- MPMC SougataDokument5 SeitenMPMC SougataSherlok HolmesNoch keine Bewertungen
- 80286 MICROPROCESSOR ARCHITECTURE AND ASSEMBLY LANGUAGEDokument76 Seiten80286 MICROPROCESSOR ARCHITECTURE AND ASSEMBLY LANGUAGEInquisitive KidNoch keine Bewertungen
- MICROPROCESSOR LAB MANUALDokument85 SeitenMICROPROCESSOR LAB MANUALReddyNoch keine Bewertungen
- 8086 Microprocessor Lecture NotesDokument15 Seiten8086 Microprocessor Lecture NotesayushNoch keine Bewertungen
- 8086 8088 Hardware SpecificationsDokument28 Seiten8086 8088 Hardware SpecificationsJac ChanchalNoch keine Bewertungen
- Microprocessor and Its ApplicationsDokument24 SeitenMicroprocessor and Its Applicationssuperkan619Noch keine Bewertungen
- Iii Ece MPMC QBDokument10 SeitenIii Ece MPMC QBvigneshcsNoch keine Bewertungen
- Unit - I: Department of Ece 1Dokument11 SeitenUnit - I: Department of Ece 1Su YeeNoch keine Bewertungen
- Assignment1_ContentDokument13 SeitenAssignment1_Contentmuhamed21bcs2Noch keine Bewertungen
- Microprocessor and embeded systems assignment 1 and 2Dokument6 SeitenMicroprocessor and embeded systems assignment 1 and 2panasheNoch keine Bewertungen
- A Study On MicropocessorDokument12 SeitenA Study On MicropocessormanaskollamNoch keine Bewertungen
- Coa PR-2Dokument10 SeitenCoa PR-2tovev86979Noch keine Bewertungen
- Frequency MeterDokument48 SeitenFrequency MeterSumit AgarwalNoch keine Bewertungen
- Microprocessors and Microcontrollers Lab ManualDokument53 SeitenMicroprocessors and Microcontrollers Lab ManualKarthik BoggarapuNoch keine Bewertungen
- 80386Dokument89 Seiten80386chandanayadav849050% (2)
- 80x86 Processors and Compatible CoprocessorsDokument32 Seiten80x86 Processors and Compatible CoprocessorsSumit ChopraNoch keine Bewertungen
- IIT Convolution CodesDokument11 SeitenIIT Convolution CodesHarshaNoch keine Bewertungen
- Mosfet: Metal Oxide Semiconductor Field Effect TransistorsDokument47 SeitenMosfet: Metal Oxide Semiconductor Field Effect Transistorschandanayadav8490Noch keine Bewertungen
- VLSI Design Circuits & Layout OutlineDokument48 SeitenVLSI Design Circuits & Layout Outlinechandanayadav8490Noch keine Bewertungen
- Pass-Band Data Transmission: Dr. Teerasit KasetkasemDokument116 SeitenPass-Band Data Transmission: Dr. Teerasit Kasetkasemchandanayadav8490Noch keine Bewertungen
- CH 5 ADokument45 SeitenCH 5 Achandanayadav8490Noch keine Bewertungen
- PIC 16f877a Data SheetDokument234 SeitenPIC 16f877a Data Sheetanon-26401438% (8)
- Strain Gauge Application andDokument6 SeitenStrain Gauge Application andchandanayadav8490Noch keine Bewertungen
- 5 Timer (Part 1)Dokument29 Seiten5 Timer (Part 1)chandanayadav8490Noch keine Bewertungen
- Limit SwitchDokument32 SeitenLimit Switchchandanayadav8490Noch keine Bewertungen
- 8255Dokument42 Seiten8255Venkat VadlamaniNoch keine Bewertungen
- MC14008BDokument8 SeitenMC14008Bchandanayadav8490Noch keine Bewertungen
- Signal ConditioningDokument8 SeitenSignal ConditioningjannusstarkNoch keine Bewertungen
- Chapter 19: Real-Time SystemsDokument24 SeitenChapter 19: Real-Time Systemsrockin_ravi_vitNoch keine Bewertungen
- ASM Program SampleDokument1 SeiteASM Program SamplesebveeNoch keine Bewertungen
- Traditional StoriesDokument14 SeitenTraditional Storieschandanayadav8490Noch keine Bewertungen
- LNM 1Dokument42 SeitenLNM 1KANHIYA78100% (1)
- Components of A Computer - Information Technology and CommunicationDokument7 SeitenComponents of A Computer - Information Technology and CommunicationDarryl John PasambaNoch keine Bewertungen
- JEDEC 22A122 - Power Cycling Test - PCTDokument18 SeitenJEDEC 22A122 - Power Cycling Test - PCTDaus Villa Jr.Noch keine Bewertungen
- Dgca Module 07 Part 08Dokument19 SeitenDgca Module 07 Part 08iftiNoch keine Bewertungen
- Tamil Christian Books ListDokument4 SeitenTamil Christian Books ListBro. Raja KrishnanNoch keine Bewertungen
- Autogard 400 torque limiter installation guideDokument32 SeitenAutogard 400 torque limiter installation guideCioz NguyenNoch keine Bewertungen
- Pds PB Function 2013Dokument49 SeitenPds PB Function 2013Virendra SinghNoch keine Bewertungen
- PC Laptop 101learn The BasicsDokument20 SeitenPC Laptop 101learn The BasicsAaron Joshua AguinaldoNoch keine Bewertungen
- Catalog FIRE 08.2011 054581.G0 EnglishDokument303 SeitenCatalog FIRE 08.2011 054581.G0 EnglishCostin VictorNoch keine Bewertungen
- Krohne IFC 010 ManualDokument67 SeitenKrohne IFC 010 ManualDnyaneshwar PatilNoch keine Bewertungen
- 2 5801 Gewindeformen GBDokument4 Seiten2 5801 Gewindeformen GBks2000n1Noch keine Bewertungen
- Unit 3 Cloud Virtualization TechnologyDokument18 SeitenUnit 3 Cloud Virtualization TechnologyYonesH gurUngNoch keine Bewertungen
- Blind Deaf and Dumb PPT 1st ReviewDokument16 SeitenBlind Deaf and Dumb PPT 1st ReviewRaju SharmaNoch keine Bewertungen
- Setting Up WAN Emulation Using WAN-Bridge Live-CD v1.09Dokument8 SeitenSetting Up WAN Emulation Using WAN-Bridge Live-CD v1.09Ahmed SharifNoch keine Bewertungen
- 1 - Format of Six Weeks Training ReportDokument5 Seiten1 - Format of Six Weeks Training ReportDeepak MehtaNoch keine Bewertungen
- Installation Manual Series D 1FH: Proportional DC ValveDokument20 SeitenInstallation Manual Series D 1FH: Proportional DC ValveАлексей Бурлаков100% (1)
- 1 Sem CFA Question Solving, Objective Question and Dos Command PDFDokument50 Seiten1 Sem CFA Question Solving, Objective Question and Dos Command PDFSabin AcharyaNoch keine Bewertungen
- Parts Book P20-P50/51-P75/76-P315 Gear Pumps and Motors: Distributor ProgramDokument37 SeitenParts Book P20-P50/51-P75/76-P315 Gear Pumps and Motors: Distributor ProgramEddy OrtegaNoch keine Bewertungen
- Aspire m3581tDokument234 SeitenAspire m3581tALP1981Noch keine Bewertungen
- Extreme NXT PDFDokument2 SeitenExtreme NXT PDFShawnNoch keine Bewertungen
- EPOS P Programming ReferenceDokument102 SeitenEPOS P Programming ReferenceΑντώνης ΠαππάςNoch keine Bewertungen
- imageRUNNER 5570,6570Dokument932 SeitenimageRUNNER 5570,6570nikola1660100% (3)
- BCN-1219A-8001-1 - 1200A Series Quick Start GuideDokument2 SeitenBCN-1219A-8001-1 - 1200A Series Quick Start GuidePrince Friday EkpoNoch keine Bewertungen
- User Guide SLF-H - 253255964-D - Ed.04 para ImprimirDokument114 SeitenUser Guide SLF-H - 253255964-D - Ed.04 para ImprimirpabloyarceNoch keine Bewertungen
- Direct Current CompressorDokument2 SeitenDirect Current Compressorcbdk71Noch keine Bewertungen
- 980504B Multi Variable FTDokument7 Seiten980504B Multi Variable FTsyed jeelani ahmedNoch keine Bewertungen
- Instrumentationtools Com PLC Program Water Level ControlDokument7 SeitenInstrumentationtools Com PLC Program Water Level ControlAlex SalesNoch keine Bewertungen
- FPGA Digital Graphic EqualizerDokument122 SeitenFPGA Digital Graphic Equalizerbois_olivierNoch keine Bewertungen
- Service Mode & Error Codes - Led Blinking Codes - Philips Pfl-Series LCD TvsDokument4 SeitenService Mode & Error Codes - Led Blinking Codes - Philips Pfl-Series LCD TvsEnrik VillaNoch keine Bewertungen
- 08-EE310 Electromechanical Level Measuring System Operation ManualDokument25 Seiten08-EE310 Electromechanical Level Measuring System Operation ManualJohnny Liu JohnnyNoch keine Bewertungen
- Murphy pv101C Users GuideDokument47 SeitenMurphy pv101C Users GuideRafael StriederNoch keine Bewertungen